 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問(wèn)
提問(wèn)  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
成分
| NEO-6M-GPS | x 1 |
| MPU-6050 | x 1 |
| HMC5883L | x 1 |
描述
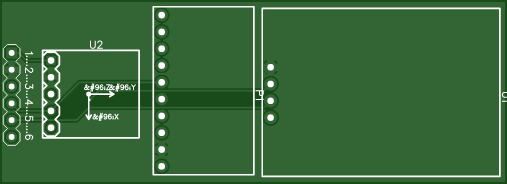
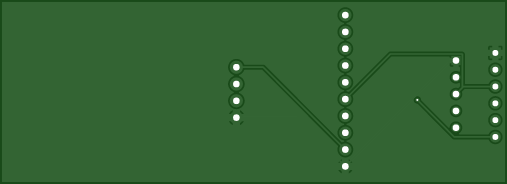
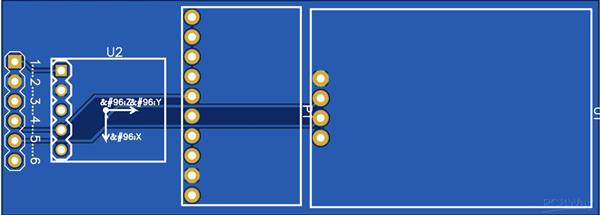
位置分線板
位置傳感器分線板
在當(dāng)今的先進(jìn)技術(shù)時(shí)代,許多電子項(xiàng)目需要各種各樣的傳感器來(lái)收集和處理一系列應(yīng)用程序的數(shù)據(jù)。具有 GPS 模塊 (u-blox NEO-6M)、慣性測(cè)量單元 (IMU) (MPU-6050) ) 和一個(gè) 3 軸數(shù)字羅盤模塊 (HMC5883L),該板有助于從這些不同但互補(bǔ)的傳感器無(wú)縫收集數(shù)據(jù),從而釋放多種可能性。
廣泛的應(yīng)用:
全球定位:包含 NEO-6M GPS 模塊可以高精度跟蹤物體的全球位置。事實(shí)證明,此功能在車輛跟蹤、資產(chǎn)管理和地理圍欄等各種應(yīng)用中不可或缺。
運(yùn)動(dòng)跟蹤和定向:通過(guò)利用 MPU-6050 的加速度計(jì)和陀螺儀,該分線板可以部署在需要運(yùn)動(dòng)跟蹤和定向數(shù)據(jù)的項(xiàng)目中。從為無(wú)人機(jī)創(chuàng)建慣性測(cè)量單元 (IMU) 到集成到 VR 控制器中,應(yīng)用范圍非常廣泛。
方向和導(dǎo)航: HMC5883L 的 3 軸數(shù)字羅盤數(shù)據(jù)與 MPU-6050 的加速度計(jì)和陀螺儀數(shù)據(jù)相結(jié)合,可用于構(gòu)建精確的室內(nèi)和室外導(dǎo)航系統(tǒng)。這種結(jié)合可以極大地增強(qiáng)自動(dòng)駕駛汽車、可穿戴設(shè)備或智能手機(jī)應(yīng)用程序的功能。
開發(fā)分線板:
創(chuàng)建用于位置跟蹤的專業(yè)且功能強(qiáng)大的分線板需要幾個(gè)步驟:
收集所需材料:這包括帶有預(yù)印跡線的 PCB 板、傳感器(GPS 模塊、IMU 和磁力計(jì))以及其他必需品,例如烙鐵、焊料、助焊劑和清潔用品。
準(zhǔn)備 PCB 板:使用異丙醇和無(wú)絨布清潔電路板,以確保組件的正確粘附。
準(zhǔn)備和放置元件:檢查每個(gè)元件,拉直任何彎曲的引腳,修剪多余的引線,然后將它們放置在 PCB 板上,將引腳與適當(dāng)?shù)暮副P或孔對(duì)齊。
焊接:組件就位后,使用烙鐵將每個(gè)組件焊接到 PCB 板上。確保為每個(gè)焊點(diǎn)實(shí)現(xiàn)閃亮的凹形圓角。
檢查焊點(diǎn):焊接完成后,檢查每個(gè)焊點(diǎn)是否存在任何潛在問(wèn)題,例如冷焊或焊橋。
糾正任何焊接問(wèn)題:如果發(fā)現(xiàn)任何問(wèn)題,應(yīng)立即通過(guò)重新加工焊點(diǎn)來(lái)解決。
清潔組裝板:所有元件焊接成功后,再次清潔PCB板以去除助焊劑殘留物。
測(cè)試組裝板:將電路板連接到電源并檢查每個(gè)傳感器的功能。
對(duì)電路板編程:完成硬件部分后,您現(xiàn)在可以上傳 Arduino 代碼以與傳感器交互、收集數(shù)據(jù)并根據(jù)您的項(xiàng)目要求執(zhí)行進(jìn)一步處理。
現(xiàn)在您的電路板應(yīng)該已準(zhǔn)備好用于任何應(yīng)用!附帶的代碼可用于測(cè)試每個(gè)傳感器擁有的電路板并確保可靠性。
代碼
示例代碼
阿杜諾
| ? | // Include necessary libraries |
| ? | #include |
| ? | #include |
| ? | #include |
| ? | #include |
| ? | ? |
| ? | // Define GPS Module connections |
| ? | #define RXPin 4 |
| ? | #define TXPin 3 |
| ? | #define GPSBaud 9600 |
| ? | ? |
| ? | // Create GPS object |
| ? | TinyGPSPlus gps; |
| ? | SoftwareSerial ss(RXPin, TXPin); |
| ? | ? |
| ? | // Create magnetometer object |
| ? | Adafruit_HMC5883_Unified mag = Adafruit_HMC5883_Unified(12345); |
| ? | ? |
| ? | // MPU6050 object |
| ? | #include |
| ? | MPU6050 mpu; |
| ? | ? |
| ? | void setup() { |
| ? | // Start communication with devices |
| ? | Wire.begin(); |
| ? | ss.begin(GPSBaud); |
| ? | Serial.begin(115200); |
| ? | ? |
| ? | // Initialise the magnetometer |
| ? | if(!mag.begin()) { |
| ? | Serial.println("Failed to initialize magnetometer"); |
| ? | while(1); |
| ? | } |
| ? | ? |
| ? | // Initialise the MPU6050 |
| ? | mpu.initialize(); |
| ? | if(!mpu.testConnection()) { |
| ? | Serial.println("Failed to initialize MPU6050"); |
| ? | while(1); |
| ? | } |
| ? | } |
| ? | ? |
| ? | void loop() { |
| ? | // Read from GPS |
| ? | while (ss.available() > 0) { |
| ? | gps.encode(ss.read()); |
| ? | if (gps.location.isUpdated()) { |
| ? | Serial.print("Latitude= "); |
| ? | Serial.print(gps.location.lat(), 6); |
| ? | Serial.print(" Longitude= "); |
| ? | Serial.println(gps.location.lng(), 6); |
| ? | } |
| ? | } |
| ? | ? |
| ? | // Read from magnetometer |
| ? | sensors_event_t event; |
| ? | mag.getEvent(&event); |
| ? | Serial.print("Magnetic X: "); Serial.print(event.magnetic.x); Serial.print(" "); |
| ? | Serial.print("Y: "); Serial.print(event.magnetic.y); Serial.print(" "); |
| ? | Serial.print("Z: "); Serial.print(event.magnetic.z); Serial.print(" "); |
| ? | Serial.println("uT"); |
| ? | ? |
| ? | // Read from MPU6050 |
| ? | int16_t ax, ay, az, gx, gy, gz; |
| ? | mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); |
| ? | Serial.print("Acceleration X: "); Serial.print(ax); Serial.print(" "); |
| ? | Serial.print("Y: "); Serial.print(ay); Serial.print(" "); |
| ? | Serial.print("Z: "); Serial.print(az); Serial.print(" "); |
| ? | Serial.print("Gyro X: "); Serial.print(gx); Serial.print(" "); |
| ? | Serial.print("Y: "); Serial.print(gy); Serial.print(" "); |
| ? | Serial.print("Z: "); Serial.print(gz); Serial.println(" "); |
| ? | ? |
| ? | // Delay for readability of output |
| ? | delay(1000); |
| ? | } |
?
- 電機(jī)驅(qū)動(dòng)器分線板開源分享
- 環(huán)境傳感器分線板開源分享
- 分線板INFENEON KP236N6165絕壓傳感器開源
- ESP32 A1S分線板開源設(shè)計(jì)
- 用于NI RoboRIO的FRC傳感器分線器開源
- APA102 SPI LED分線板開源
- 1.27mm分線板開源分享
- 74HC595分線板開源
- ESP 12E/F分線板開源
- 6809/3 CPU分線板開源項(xiàng)目
- ATX分線板開源項(xiàng)目
- ISS Mimic電機(jī)分線板開源項(xiàng)目
- TQFN 32/SMD分線板開源
- Reef-Pi分線板開源資料
- SCART分線板開源分享
- 節(jié)氣門位置傳感器壞了有什么現(xiàn)象 748次閱讀
- 凸輪軸位置傳感器在哪個(gè)位置 凸輪軸位置傳感器三根線怎么測(cè)量 2162次閱讀
- 凸輪軸位置傳感器的作用 凸輪軸位置傳感器壞了有什么影響 921次閱讀
- 曲軸位置傳感器的主要作用 1648次閱讀
- 霍爾式曲軸位置傳感器的檢修步驟 1054次閱讀
- 位置傳感器簡(jiǎn)介及類型說(shuō)明 7035次閱讀
- 什么是凸輪軸位置傳感器它的作用是什么 6358次閱讀
- 進(jìn)氣壓力傳感器的作用及安裝位置 2.3w次閱讀
- 凸輪軸位置傳感器壞了有什么影響 3.8w次閱讀
- 凸輪軸位置傳感器檢測(cè)_凸輪軸位置傳感器作用 1w次閱讀
- 位置傳感器原理及應(yīng)用 2.2w次閱讀
- 淺談傳感器中的位置傳感 1487次閱讀
- 知識(shí)小講解:曲軸位置傳感器原理及檢測(cè)方法 3290次閱讀
- 風(fēng)壓傳感器安裝位置 6638次閱讀
- 介紹如何拆焊Flash芯片,設(shè)計(jì)及制作相應(yīng)的分線板 1.4w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊(cè)
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評(píng)估板參考手冊(cè)
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來(lái)的未來(lái)-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報(bào)告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊(cè)
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊(cè)免費(fèi)下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動(dòng)電路設(shè)計(jì)》 溫德爾著
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論