 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
嘿伙計們,今天在本教程中,我們將學(xué)習(xí)一些復(fù)雜的東西。那是關(guān)于使用 Magicbit 和 Arduino IDE 的自平衡機(jī)器人。所以讓我們開始吧。
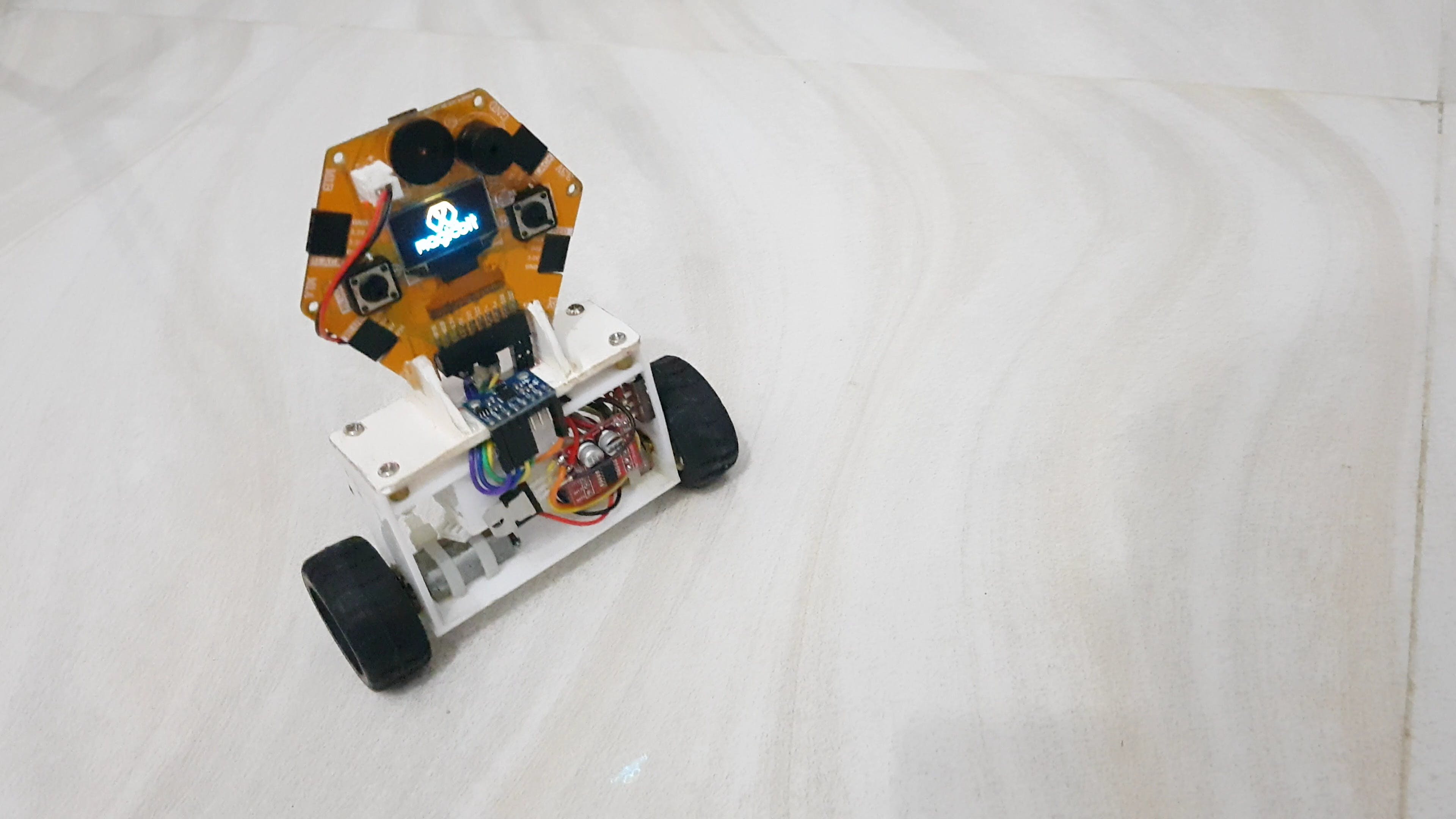
首先,讓我們看看什么是自平衡機(jī)器人。自平衡機(jī)器人是兩輪機(jī)器人。特殊之處在于機(jī)器人可以在不使用任何外部支撐的情況下自行平衡。通電后,機(jī)器人會站起來,然后通過擺動運動不斷地保持平衡。所以現(xiàn)在你對自平衡機(jī)器人有了一些粗略的了解。
理論與方法論
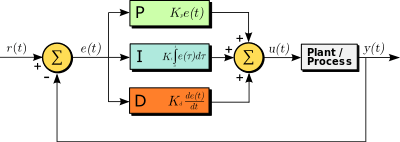
為了平衡機(jī)器人,首先我們從某個傳感器獲取數(shù)據(jù)以測量機(jī)器人與垂直平面的角度。為此,我們使用了 MPU6050。從傳感器獲取數(shù)據(jù)后,我們計算垂直平面的傾斜度。如果機(jī)器人處于直線和平衡位置,則傾斜角為零。如果不是,則傾斜角為正值或負(fù)值。如果機(jī)器人向前傾斜,那么機(jī)器人應(yīng)該向前移動。此外,如果機(jī)器人向反方向傾斜,則機(jī)器人應(yīng)向反方向移動。如果這個傾斜角很高,那么響應(yīng)速度應(yīng)該很高。反之亦然,傾斜角低則反應(yīng)速度應(yīng)低。為了控制這個過程,我們使用了稱為 PID 的特定定理。PID是用于控制許多過程的控制系統(tǒng)。PID 代表 3 個進(jìn)程。
- P-比例
- I-積分
- D-導(dǎo)數(shù)
每個系統(tǒng)都有輸入和輸出。同樣這個控制系統(tǒng)也有一些輸入。在這個控制系統(tǒng)中,即偏離穩(wěn)定狀態(tài)。我們稱之為錯誤。在我們的機(jī)器人中,誤差是垂直平面的傾斜角。如果機(jī)器人是平衡的,那么傾斜角為零。所以誤差值將為零。因此PID系統(tǒng)的輸出為零。該系統(tǒng)包括三個獨立的數(shù)學(xué)過程。
- 第一個是數(shù)字增益的乘法誤差。這種增益通常稱為 Kp。
P=誤差*Kp
- 第二個是在時域中生成誤差的積分,并將其與一些增益相乘。這種增益稱為 Ki
I = 積分(誤差)* Ki
- 第三個是時域誤差的導(dǎo)數(shù),并將其乘以一定量的增益。該增益稱為 Kd
D=(d(誤差)/dt)*kd
添加上述操作后,我們得到最終輸出
輸出=P+I+D
因為P部分機(jī)器人可以得到與偏差成正比的穩(wěn)定位置。我部分計算了誤差與時間圖的面積。所以它試圖讓機(jī)器人始終準(zhǔn)確地穩(wěn)定位置。D 部分測量時間與誤差曲線的斜率。如果誤差增加,則該值為正。如果誤差在減小,則該值為負(fù)。因此,當(dāng)機(jī)器人移動到穩(wěn)定位置時,反應(yīng)速度會降低,這將有助于消除不必要的超調(diào)。
PID 功能的輸出限制在 0-255 范圍(8 位 PWM 分辨率),并將作為 PWM 信號饋送到電機(jī)。
硬件設(shè)置
現(xiàn)在這是硬件設(shè)置部分。機(jī)器人的設(shè)計取決于你。當(dāng)您設(shè)計機(jī)器人的身體時,您必須考慮它關(guān)于位于電機(jī)軸的垂直軸對稱。電池組位于下方。因此機(jī)器人很容易平衡。在我們的設(shè)計中,我們將 Magicbit 板垂直固定在機(jī)身上。我們使用了兩個 12V 齒輪電機(jī)。但是您可以使用任何類型的齒輪電機(jī)。這取決于您的機(jī)器人尺寸。
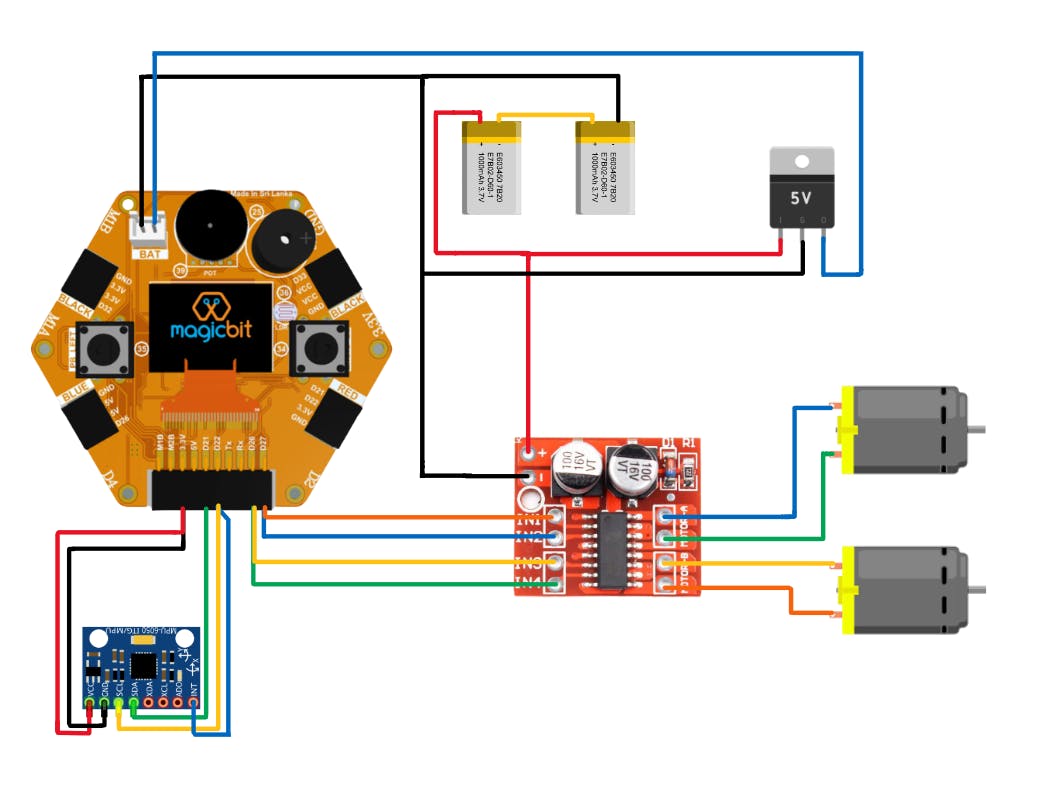
當(dāng)我們討論電路時,它由 7.4V 鋰電池供電。Magicbit 使用 5V 供電。因此我們使用 7805 穩(wěn)壓器將電池電壓調(diào)節(jié)到 5V。在更高版本的 Magicbit 中,不需要該調(diào)節(jié)器。因為它的供電電壓高達(dá) 12V。我們直接為電機(jī)驅(qū)動器提供 7.4V。
根據(jù)下圖連接所有組件。
軟件設(shè)置
在代碼中,我們使用 PID 庫來計算 PID 輸出。
為了獲得更好的傳感器讀數(shù),我們使用了 DMP 庫。DMP 代表數(shù)字運動過程。這是 MPU6050 的內(nèi)置功能。該芯片集成了運動處理單元。所以需要閱讀和分析。在它向微控制器(在本例中為 Magicbit(ESP32))生成無噪聲準(zhǔn)確輸出之后。但是在微控制器方面有很多工作來獲取讀數(shù)并計算角度。簡單來說,我們使用了 MPU6050 DMP 庫。
要安裝庫,在 Arduino 菜單中轉(zhuǎn)到工具-> 包含庫->add.zip 庫并選擇您下載的庫文件。
在代碼中,您必須正確更改設(shè)定點角度。PID 常數(shù)值因機(jī)器人而異。因此,在調(diào)整時,首先將 Ki 和 Kd 值設(shè)置為零,然后增加 Kp,直到您獲得更好的反應(yīng)速度。更多的 Kp 會導(dǎo)致更多的過沖。然后增加 Kd 值。總是以很少的量增加它。該值通常低于其他值。現(xiàn)在增加 Ki 直到你有很好的穩(wěn)定性。
- 二輪自平衡機(jī)器人開源設(shè)計
- 自平衡機(jī)器人的構(gòu)建
- 使用Arduino的自平衡機(jī)器人 0次下載
- 基于Arduino UNO的自平衡機(jī)器人 0次下載
- 帶有BT Web控制的Arduino自平衡機(jī)器人
- 利用麥克風(fēng)和音符來控制自平衡機(jī)器人
- 使用TensorFlow對自平衡機(jī)器人進(jìn)行手勢控制
- 如何制作WiFi控制的自平衡機(jī)器人
- Arduino平衡機(jī)器人盾牌代碼
- 迷你平衡機(jī)器人
- 畢業(yè)設(shè)計--球上自平衡機(jī)器人
- 基于JJBoover的遠(yuǎn)程控制ARDUNO自平衡機(jī)器人資料下載 2次下載
- 可載人自平衡移動機(jī)器人控制系統(tǒng)設(shè)計李京濤 0次下載
- DIY:簡簡單單自制平衡機(jī)器人 25次下載
- 自平衡人形機(jī)器人動作控制器的設(shè)計
- 電機(jī)轉(zhuǎn)子動平衡機(jī)使用過程中的常見問題 929次閱讀
- 烤箱自平衡門鉸鏈機(jī)構(gòu)的設(shè)計 1760次閱讀
- 利用STM32實現(xiàn)自平衡機(jī)器人功能項目 873次閱讀
- 基于STM32的自平衡機(jī)器人設(shè)計 802次閱讀
- 基于STM32的球上自平衡機(jī)器人設(shè)計方案 1855次閱讀
- 如何使用Arduino制造一個自動平衡機(jī)器人 4429次閱讀
- 基于使用A4988驅(qū)動程序和HC-05 bt模塊構(gòu)建自平衡機(jī)器人 2007次閱讀
- 基于ATmage128單片機(jī)和紅外測距傳感器實現(xiàn)自平衡機(jī)器人系統(tǒng)的設(shè)計 2272次閱讀
- 基于ATmega128單片機(jī)實現(xiàn)自平衡機(jī)器人控制系統(tǒng)的應(yīng)用方案 3851次閱讀
- 聯(lián)想發(fā)布自研工業(yè)機(jī)器人 2601次閱讀
- 面對疫情 醫(yī)療機(jī)器人能幫上什么忙? 2126次閱讀
- 真空潔凈機(jī)器人 6179次閱讀
- 協(xié)作機(jī)器人的起源_為什么需要協(xié)作機(jī)器人 8127次閱讀
- 簡易平衡機(jī)器人制作圖解 6786次閱讀
- 軟體機(jī)器人 前所未見的機(jī)器人 3692次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應(yīng)用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關(guān)電源設(shè)計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅(qū)動電路設(shè)計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學(xué)會AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論