 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
該項目由 Matthew Hurley 撰寫,是為 NXP HoverGames 挑戰 2 提交的作品:幫助無人機,在大流行期間幫助他人。
動機
圍繞當前的大流行,蝙蝠受到了廣泛的關注。更準確地說,負面關注是因為它們被確定為 SARS-CoV-2 鏈的攜帶者和潛在來源。當然,由于我們的團隊成員之一是野生動物生物學博士生,專門研究蝙蝠,我們認為這個項目和比賽是促進和闡明蝙蝠研究的絕佳機會。特別是,我們的努力集中在尋找帶有無線電標簽的蝙蝠的過程上。
你可能會想,“蝙蝠研究與流行病有什么關系?” 由于蝙蝠是一些重要疾病的攜帶者,包括狂犬病、埃博拉病毒和如前所述的 SARS-CoV-2,蝙蝠的基礎研究在全球流行病防治中發揮著至關重要的作用。雖然蝙蝠攜帶新病毒鏈的能力肯定不是獨一無二的(大多數致命病毒來自其他哺乳動物),但它們攜帶的病毒往往具有特別強的毒性。此外,它們獨特的免疫系統以及它們是唯一會飛行的哺乳動物這一事實,使蝙蝠物種成為研究引起大流行的病毒的絕佳案例。隨著人類對蝙蝠棲息地的侵占越來越多,這反過來又意味著與它們接觸的機會越來越多,現在正是我們將蝙蝠研究游戲提升到一個新水平的最佳時機。
問題
如果讀者對蝙蝠研究過程有簡短的背景,就更容易理解我們要解決的問題。一般情況如下:
從傍晚開始,在蝙蝠似乎可能會捕獵的地方架起大而輕的網。當蝙蝠被抓到時,科學家們會進行多次測量,記錄它們的性別,注意物種,最后,剃掉蝙蝠的背部,并在上面粘上一個電池供電的無線電標簽。標簽會在那里停留一兩天,直到頭發長得足夠長并且標簽脫落。在那個短暫的窗口期間,通常意味著標記蝙蝠后的早晨,研究人員必須前往樹林并開始追蹤。這里的興趣是在標簽脫落之前找到蝙蝠的棲息地,或者蝙蝠在第二天晚上離開范圍。對于世界各地的大多數團隊來說,這意味著使用手持八木(定向)天線進行駕駛、遠足和叢林探險。這是一個費時費力的過程,而且鑒于追蹤蝙蝠的時間如此之短,這可能不利于成功的研究工作。大流行只會加劇這些問題,需要更小的團隊,并限制時間和資源。
我們的解決方案:
我們的目標是加快跟蹤過程,并減少資源密集型。無人機有很多方法可以做到這一點,但我們堅持使用簡單的方法:將定向天線綁在無人機上,讓它在不同的位置繞圈飛行,然后使用三角測量蝙蝠的位置收集到的數據。此過程可用作蝙蝠位置的粗略表征,或告知研究人員從哪里開始搜索。請注意,這種方法顯然不僅限于研究蝙蝠;它可用于定位任何類型的無線電信標。但是,由于蝙蝠標簽必須很小,而 GPS 模塊又太大,因此該解決方案在蝙蝠研究領域具有特殊的優勢。我們希望這不僅能幫助研究工作,還能幫助受疫情限制的研究人員。
建造蝙蝠直升機
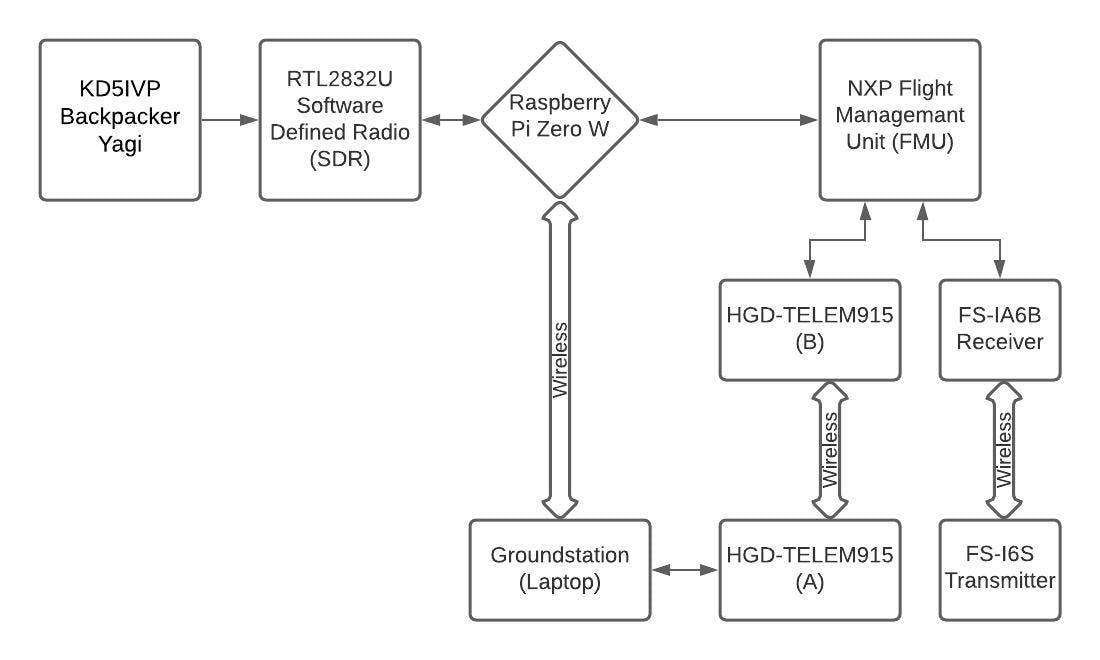
現在已經涵蓋了基礎知識,讓我們進入構建蝙蝠跟蹤無人機的細節。為此需要三個主要類別的組件:
- 無人機 - 在這種情況下是NXP Hovergames KIT-HGDRONEK66
- 配套計算機 - 我們使用的是 Raspberry Pi Zero W
- 天線/接收器系統 - 我們使用 RTL-SDR 軟件定義無線電和 DIY Yagi 天線(KD5IVP Backpacker Yagi )
該項目還需要某種可以“跟蹤”的無線電信標。我們使用了 Raspberry Pi 3B+ 和morrolinux 的 mpradio 。
希望以下內容不僅可以作為有關項目設置的有用信息,還可以作為未來用戶的指南。
無人機組裝
建造始于無人機組裝。NXP 有一個很棒的 gitbook 用于完整設置無人機,以及與開發和離線控制相關的其他資源:https ://nxp.gitbook.io/hovergames/
安裝和連接配套計算機(RPi 零 W)
接下來我們必須安裝 Raspberry Pi 零 W 和相關硬件。DROK 90010 5V 降壓轉換器用于從無人機電池中獲取電力。該案例和其他 Hovergames 附件可以在Thingiverse 上找到。

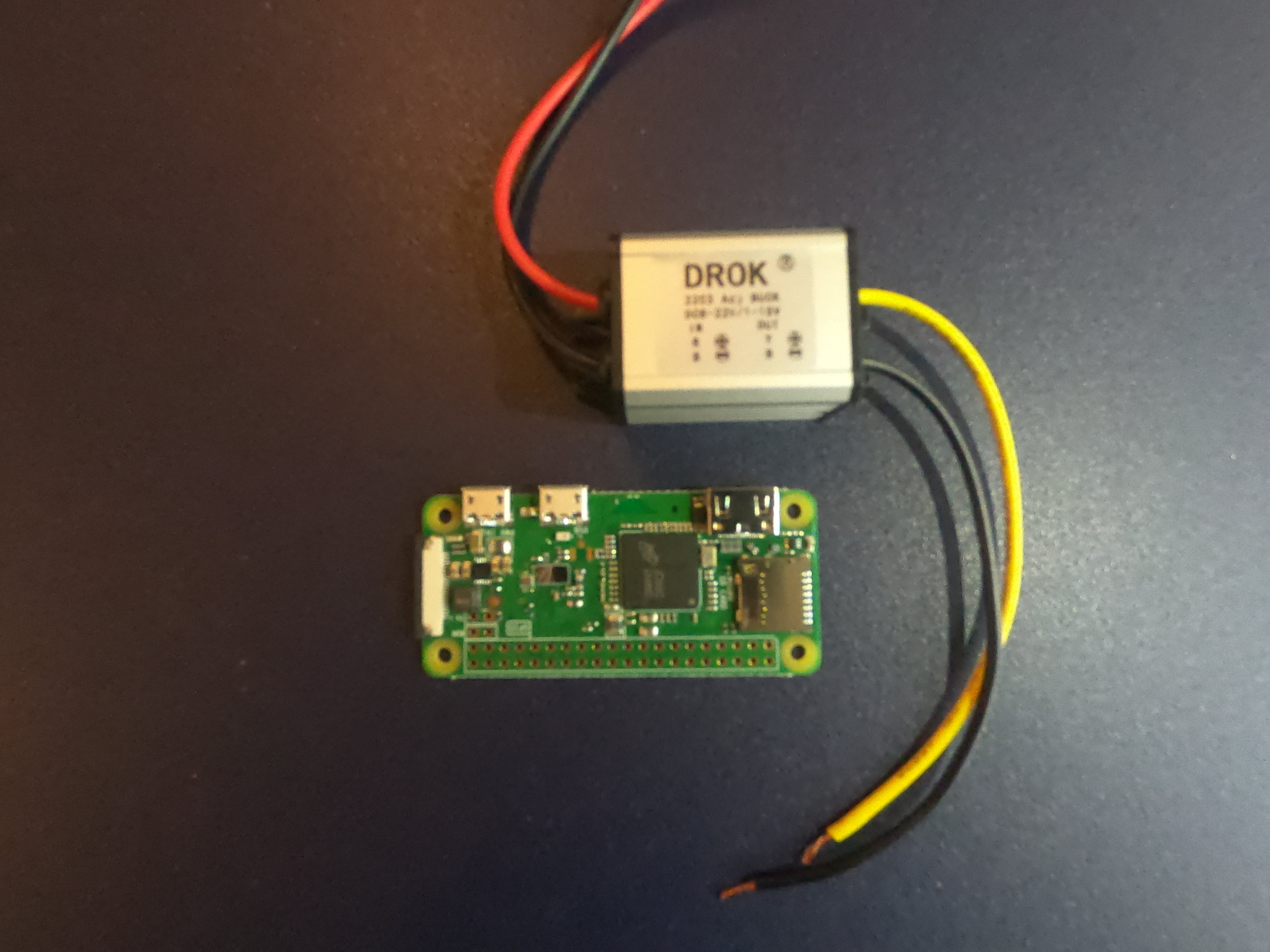
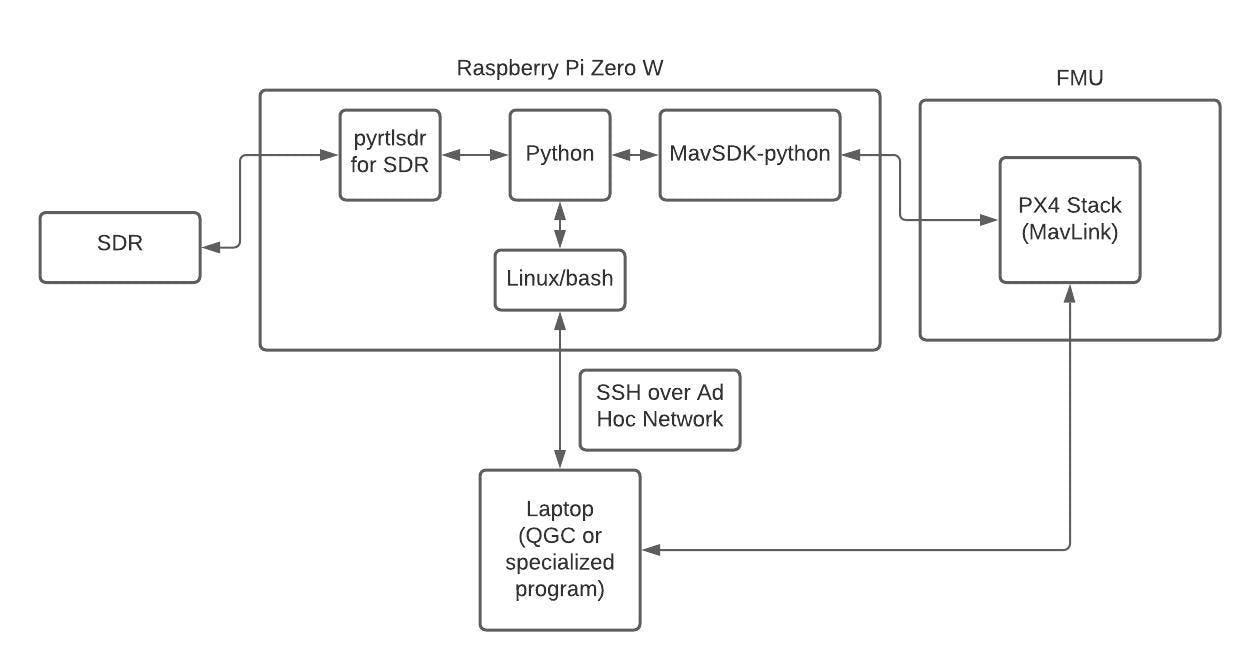
電源線焊接到引腳 4(5V 輸入)和 6(接地),然后可以通過 WAGO 或線螺母連接到降壓轉換器。轉換器的電源輸入線焊接在無人機的配電板上。JST-GH 連接器也焊接到引腳 8 (Tx)、10 (Rx) 和 9 (Gnd),與FMU 上 telem2 端口的引腳排列描述相匹配。telem2 端口是我們用來與無人機 fmu 通信的端口,通過 mavsdk-python。安裝對mavsdk-python 的支持后,
pip3 install --user --upgrade mavsdk
使用 GitHub 頁面示例文件夾中的 firmware_version.py 測試了連接。注意必須調用正確的系統地址,
system_address=“serial:///dev/serial0:921600”
必須禁用藍牙,并且還必須禁用 Linux 串行控制臺。
特設網絡
配套計算機難題的最后一塊是找出遠程啟動跟蹤任務的方法。顯然,對于 mavsdk-python,沒有用于監控 RC 開關狀態的現有 API。由于這不是我們的專業領域,我們選擇在樹莓派上建立一個 Ad Hoc 網絡。以下是樹莓派上的編輯/etc/network/interfaces文件,它將允許樹莓派廣播網絡:
# interfaces(5) file used by ifup(8) and ifdown(8)
# Please note that this file is written to be used with dhcpcd
# For static IP, consult /etc/dhcpcd.conf and 'man dhcpcd.conf'
# Include files from /etc/network/interfaces.d:
source-directory /etc/network/interfaces.d
auto lo
iface lo inet loopback
iface eth0 inet dhcp
auto wlan0
iface wlan0 inet static
address 10.2.1.1
netmask 255.255.255.0
wireless-channel 1
wireless-essid PiAdHocNetwork
wireless-mode ad-hoc
還必須從終端執行以下操作:
systemctl stop dhcpcd.service
設置好這個網絡后,您所要做的就是通過 ssh 連接到 Ad Hoc 網絡,然后從那里運行 python 腳本。這種方法很粗糙,但提供了完整的功能,因為您可以啟動程序、終止它們并監控終端的打印消息。
連接軟件定義無線電
下一步是連接 RTL-SDR 并在樹莓派上安裝對它的支持。所需要的只是一根微型 USB 到 USB-A 電纜,無線電可以通過它連接到 Raspberry Pi。然后收音機被用拉鏈綁在無人機上。

遵循從源代碼手動安裝 RTL-SDR 驅動程序的說明,并通過-roger 的 pyrtlsdr添加了 python 支持。跑步
rtl_test
就是測試連接所需要的一切。

建造天線
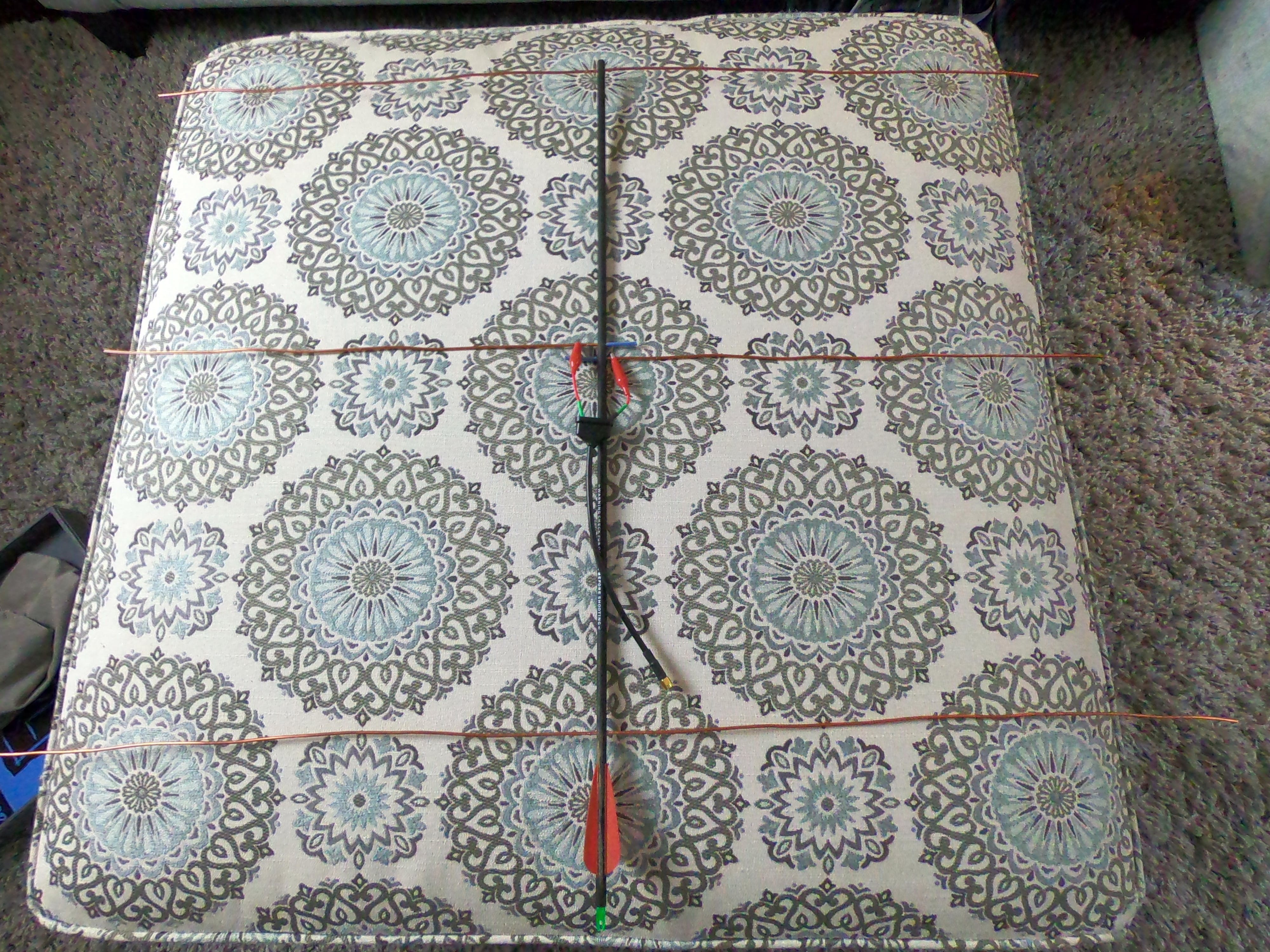
提出的用于定位無線電源的方法需要定向天線。Yagi 天線在指向信號時具有高增益,KD5IVP Backpacker Yagi是一種輕量級的解決方案,看起來很有希望,因為它必須由無人機攜帶。我們使用與原始設計者相同的尺寸,制作 2 米波段的天線,因為蝙蝠發射器標簽通常以 150MHz 左右的頻率廣播。我們使用箭頭軸作為中央支撐、10 規格剝線用于元件以及用于連接驅動元件的 SMA 連接器/鱷魚夾(焊接在一起)來構建天線。這個舊的 YouTube 視頻為組裝天線提供了一些良好的視覺效果和說明。天線使用兩塊小木板和扎帶安裝在無人機起落架上,確保軸與無人機上的數字羅盤一致。

創建無線電信標
最后一步是想出一個可以被無人機定位的無線電信標。為此,我們使用了帶有morrolinux mpradio 的Raspberry Pi 3B+ 。Pi 被設置為以 150MHz 的頻率廣播,以匹配天線的設計。在 Pi 的 GPIO 引腳 4 上添加了一小段電線,用作它自己的發射天線。
請注意,在沒有許可證的情況下以 VHF 頻率廣播是非法的,建議僅使用低功率(我們這樣做)這樣做。

?
測試
在測試無人機的全部功能之前,有必要測試組件(除了簡單的連接測試)。
執行了大量的 SITL 模擬運行,并在開發過程中發揮了重要作用,允許一次添加和測試一個代碼。根據PX4 開發人員指南中的說明,使用了與 PX4 SITL 實例結合運行的 jMAVSim 。所有的模擬和初始開發都是在 Linux 虛擬環境中完成的,與 PX4 實例的通信是通過 mavsdk-python 執行的。這兩個過程都在PX4 開發者指南、mavsdk-python文檔和NXP gitbook中有詳細記錄。
為了測試 SDR、天線和信標的功能,在 Linux 虛擬環境中使用了一個名為 CubicSDR 的程序。該程序以視覺友好的方式將光譜功率分布顯示為頻率的函數。我們用它來測試信標廣播頻率和強度,以及天線接收。它還用于對八木天線的增益和方向性進行定性表征。
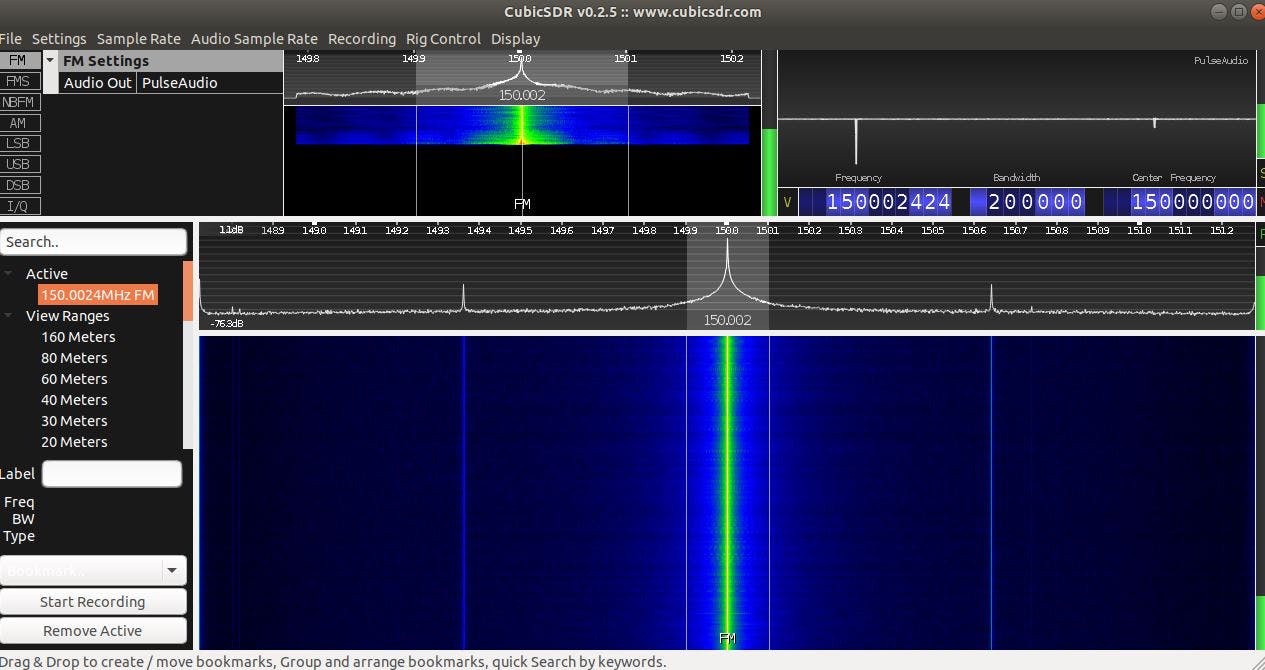
該項目的“代碼”部分還附加了代碼,詳細說明了通過終端的連接以及從原始無線電數據生成圖。生成這些圖被證明是一個必要的測試。與可能進行大量濾波和平均的 CubicSDR 不同,終端生成的圖顯示了 RTL-SDR 硬件固有的中心頻率尖峰。這個峰值(據我粗略理解)是由硬件 FFT 引起的,必須在軟件中加以考慮。為了解決這個問題,中心頻率簡單地移動了 500kHz。這導致了 2MHz 的采樣帶寬,以 150.5MHz 為中心,使感興趣的頻率 (150MHz) 不受中心頻率尖峰的任何影響。
最后,將無人機仿真代碼和無線電數據代碼結合起來,在模擬器中運行。本文檔的“代碼”部分附有經過模擬器測試的最終代碼,可提供完整的理論功能。
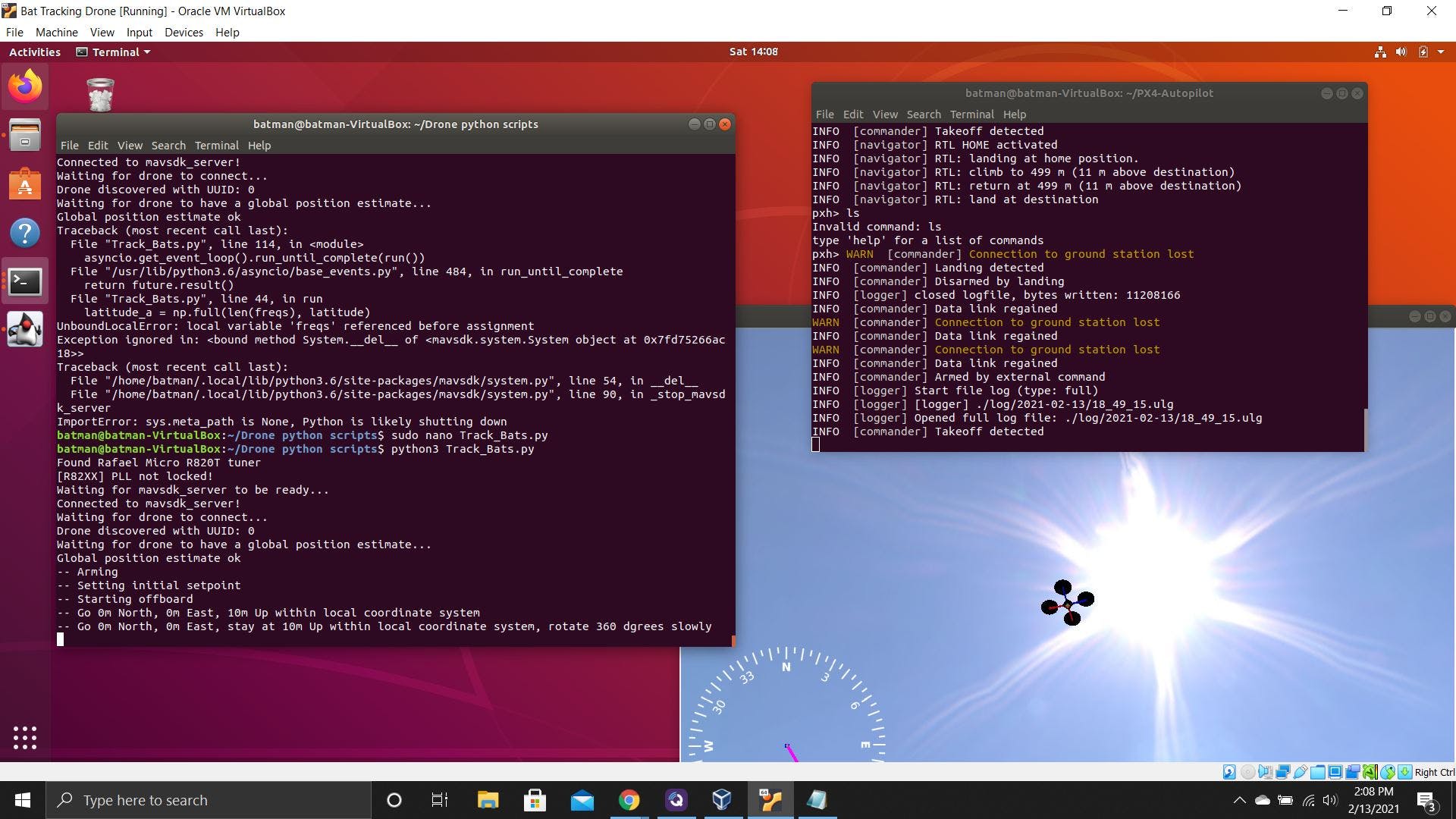
使用 GitHub 頁面中的更多示例代碼(包括武裝、健康和遙測)對無人機本身進行了測試(在 SITL 或 HITL 之外)。這些示例簡單明了,不言自明,因此這里不再贅述。
簡要代碼說明
正如所附代碼的描述所引用的:
無人機將飛行 10 米,然后緩慢旋轉一圈,以每 3 度增量記錄數據。它記錄經度、緯度、羅盤方向(從北方看的度數,從上方看時順時針方向)、信號頻率(無線電掃描一個頻帶)和以 dB 為單位的實值功率譜值。請注意,頻率偏離中心,以避免由 rtl-sdr 固有硬件設計導致的中心頻率尖峰。然后,您可以在所需頻率(在本例中為 150 MHz)附近平均幾個頻率。
少女追蹤任務和結果
由于項目最后兩周的時間限制和不間斷的降雨,我們只執行了一次定位信標的任務。有/有錯誤需要解決,但總體而言,這個概念確實得到了證明。請記住,目標是在兩個不同的位置獲得羅盤方位,指示最強信號的方向和(希望)信標位置。結果詳述如下:
該任務是在一個大場地中執行的,信標在場地中心附近處于活動狀態,而無人機則在場地一端相對兩側的兩個位置發射。下著毛毛雨,微風,所以我們當然可以要求更好的條件,但至少天氣表明硬件具有彈性。
航班#1
第一次飛行出現了一些錯誤,包括代碼連接錯誤塊的問題,我們最終將其刪除。
async for state in drone.core.connection_state():
if state.is_connected:
print(f"Drone discovered with UUID: {state.uuid}")
break
在第一次成功起飛后,無人機卡在了下一個街區(可能是因為它的高度不夠高),所以它也在飛行中被移除,并用一個 15 秒的睡眠呼叫代替。
async for position in drone.telemetry.position():
altitude = position.relative_altitude_m
if altitude > 9.5:
break
經過這兩次修復后,任務成功了……
除了著陸!
請注意,我們在起飛時遇到了天線接觸地面的問題(您可以在上面的第一個視頻中看到彎曲的反射器元件),這絕對是不可取的,并且可能指向未來的一些問題。
航班 #1 數據
第一次飛行的數據看起來非常好。以 3 度為增量收集了 2MHz 的帶寬,該頻帶內的 256 個樣本。對于每個羅盤增量,對 150MHz 附近的六個最接近頻率處的功率譜(Pxx;單位有些隨意,并且更具比較性)進行平均。正如預期的那樣,Pxx 中有兩個“尖峰”(一個可能是因為信號直接在天線前面,一個在天線后面)大約 190 度和 0 度。在這種情況下,采用了最大 Pxx 的羅盤方位。
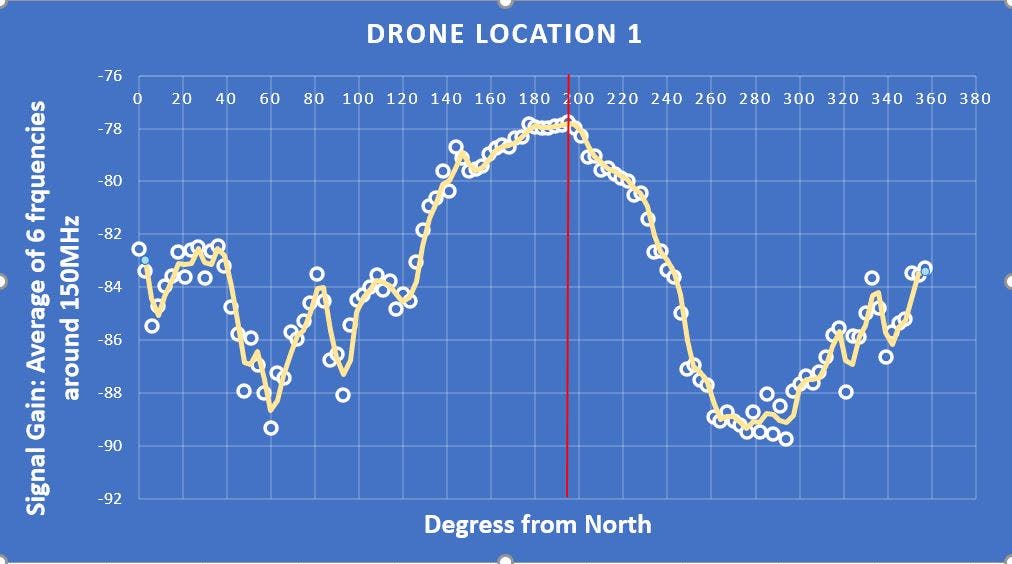
這次飛行本身就是一個很好的概念證明,因為我們有額外的好處知道信標在哪里,這與這個位置本身的方位很好地對齊。
航班#2
在飛行一墜毀后,刪除了以下代碼以防止另一次 action.return_to_launch 災難:
print("Returning to launch")
await drone.action.return_to_launch()
值得注意的是,墜機后無人機遭受了一些損壞,盡管傷害很小。然而,天線嚴重彎曲(所以我們將它向后彎曲!),這可能影響了第二次飛行的性能。同樣的任務是在一個新的地點進行的。我們還應該提到,天線在起飛時再次觸地,將其中一個驅動元件彎曲不對齊。
航班 #2 數據
第二次飛行的數據更臟,下面簡要討論。
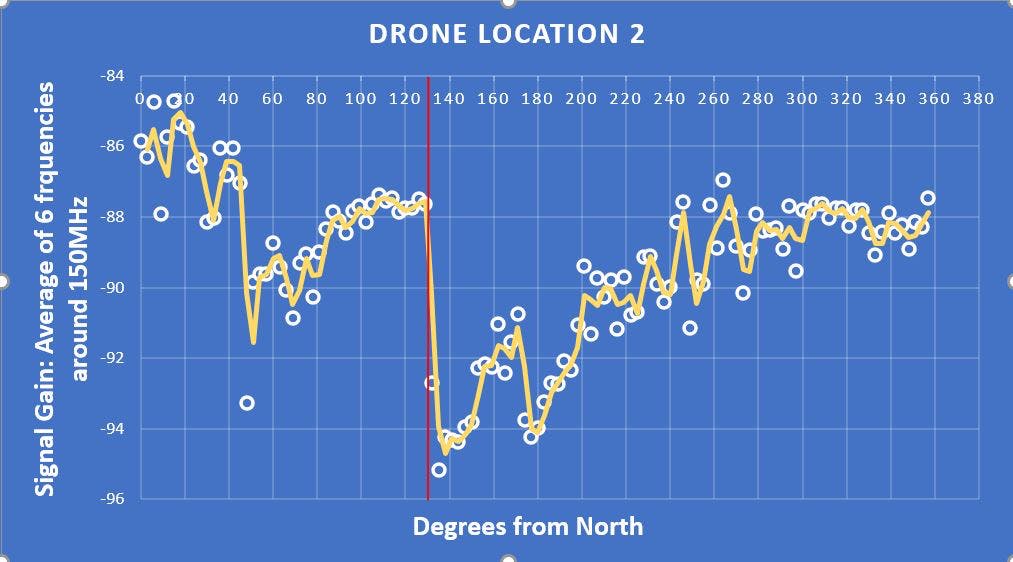
這次飛行的問題有點棘手。看起來無人機開始接收到相對較強的信號,然后在轉彎時下降,然后又開始回升——這一趨勢與我們對八木天線性能的預期一致。然而,在大約 130 度時,發生了一些奇怪的事情,表明某處發生了故障。這可能是影響 SDR 的車載電源波動(墜機造成的未知損壞),但看起來更像是信標發生了什么事。此外,由于其中一個驅動元件在起飛時彎曲,因此預計此處的數據至少部分不可靠。
選擇使用哪個數據點來獲得方位并不一定很簡單。但是,由于選擇最大(接近 0 度)的方位會導致方位不相交,并且鑒于數據在“奇怪”事件發生之前呈 130 度上升趨勢,我們選擇了之前的點急劇下降。當然,這在一定程度上得益于了解信標的大致位置,但趨勢肯定存在,即使沒有一些先前的信標知識,這似乎也不是不合理的分析。
計算最終位置
每個位置有兩個位置和方位,興趣點的計算很簡單:
Given point (x1,y1) with bearing D1, and point (x2,y2) with bearing D2, the intersection of those two bearings can be found by equating the following two formulas, where (x3,y3) is the point of interest:
y3 = s1(x3 - x1) + y1 , y3 = s2(x3 - x2) + y2
where s1 = tan(90 - D1) , s2 = tan(90 - D2)
這將產生以下最終地圖:
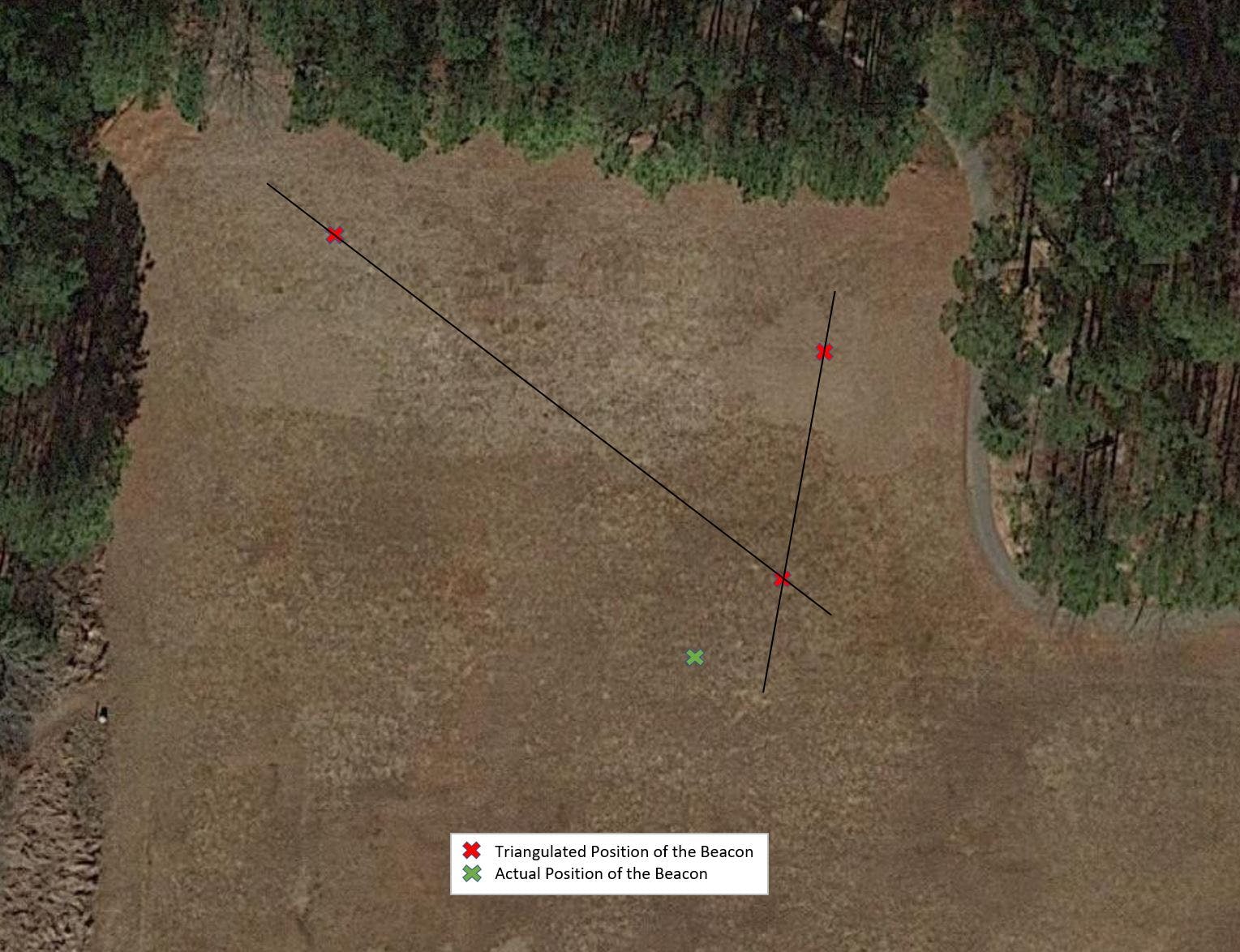
最后,三角測量的位置離實際位置大約 10m。這是一個非常好的結果,有明顯的改進空間。
最后的想法和未來的想法
雖然結果顯著,但主要有以下三個方面需要改進:
- 天線設計和安裝
在我們看來,這是最大的問題。擁有更精確的設計(例如,改進用于元件的 10 規格的剝線),并使天線不易受應力影響,應該會大大改善我們想要的窄接收帶寬。此外,天線確實需要以更好的方式安裝,以防止它在起飛時被夾住。
- 過濾 SDR 輸入/輸出
有許多方法可以做到這一點,目標再次是縮小接收帶寬。
- 天線與指南針對齊
我們并沒有過多談論這個,因為,嗯,它真的只是目不轉睛。未對準可以作為偏移進行校正(非常穩定的安裝需要更多的運行),但是最好有一個夾具和/或校準程序來正確對齊所有東西。
還希望一次掃描多個頻率,并可能讓無人機飛到多個 GPS 位置,從而限制起飛和著陸的次數。這里的挑戰將是優化掃描速度,以便在電池電量不足之前完成所有任務。
將來,我們希望嘗試使用更小的八木天線來處理 UHF 頻率(大約 800-900MHz)。這種系統的優勢在于擁有更小、更實惠、更耐用的標簽和天線(解決了上述大部分問題)。這里明顯的缺點是較高的頻率不會傳播得那么遠。這個問題可以相對容易地解決,方法是讓無人機飛行搜索模式,直到它找到一個重要的信號(或某種形式的信號,例如 1Hz 載波上的 900MHz),然后它會像以前一樣在幾個位置旋轉,三角測量, 并返回。這絕對是一個更復雜的系統,具有很大的潛力。
- 無人機結構與系統 8次下載
- DragonFly無人機原理圖免費下載 31次下載
- 基于無人機圖像的兩階段銷釘缺陷檢測模型 39次下載
- 一種通過軌跡和形態識別檢測無人機的方法 18次下載
- 小型電動無人機的總體參數設計方法研究說明 19次下載
- 無人機的飛行原理的簡介和設計資料說明 15次下載
- 警用無人機關鍵技術及發展趨勢 13次下載
- 如何使用云計算進行無人機云操作系統的詳細資料說明 8次下載
- 無人機和無人機控制方法及無人機遠程操控系統方法說明 69次下載
- 如何使用無線電對無人機進行管控 7次下載
- 無人機中繼模塊和無人機圖傳控制系統介紹 61次下載
- 無人機柔性裝配工裝應用 2次下載
- 基于無人機的分類 20次下載
- 基于STM32的無人機姿態測量系統設計 44次下載
- 無人機偵測和反制系統 30次下載
- 無人機群的神秘面紗 無人機的未來發展路線 1519次閱讀
- 關于如何制作一個無人機 3.7w次閱讀
- 無人機是如何充電的? 2.1w次閱讀
- 怎樣使無人機安全飛行?無人機飛行需要掌握什么安全知識 1.6w次閱讀
- 新疆為什么禁飛無人機_新疆無人機禁飛區域 5.7w次閱讀
- 水下無人機的用途和優勢有哪些 9549次閱讀
- 水下無人機原理分析 1.4w次閱讀
- nixie微型無人機的功能介紹_nixie微型無人機多少錢 1.3w次閱讀
- 微型無人機發展前景_無人機發展趨勢 8518次閱讀
- 大疆做不做軍用無人機 2w次閱讀
- 中國有哪些軍用無人機_國內軍用無人機排名 11.3w次閱讀
- 大疆無人機如何在禁飛區起飛 15.3w次閱讀
- 電動無人機和油動無人機性能的對比 2805次閱讀
- 無人機新手入門指南 1.5w次閱讀
- 無人機發展的技術難點分析 4264次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論