 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
引言
CAN(Controller Area Network)控制器局域網,主要用于各種設備監測及控制的局域網。最初由德國Bosch公司用于汽車的監控系統而設計,具有良好的功能特性和極高的可靠性,現場抗干擾能力極強, 總線形式為串行數據通信總線。
TI 的24X系列芯片,具有處理性能優良(30MIPS),外設集成度高,程序存儲器容量大,A/D轉換速度快等特點,是基于工業控制而設計的DSP(數字信號處理)類芯片。LF2407A以其豐富的集成外設,提供了電機數字化控制解決方案。其嵌入式CAN總線控制器,基于CAN2.0B規范要求,提供了CAN通信功能,可為實現分布式工業監控局域網絡提供了一個解決方案。
CAN總線簡介
CAN屬于現場總線的范疇,有效支持分布式控制或實時控制的串行通信網絡。CAN的應用范圍很廣,從高速的網絡到低價位的多路界限都可以使用CAN 。在自動化電子領域的汽車發動機控制部件、傳感器、抗滑系統等應用中,CAN的位速率可高達1Mbps。
區別與傳統的控制系統采用按控制回路進行一對一連接的方法,現場總線采用智能現場設備,具有運算、控制和通信功能,可以在現場完成數據采集、數據分析、控制處理等功能,并將有關數據發送到主機及其它現場設備,實現可徹底的分布式控制。
CAN總線特點:
1系統的開放性。2現場設備具有高度的自治性和智能化的特點。3系統的高度分散性。4對現場環境的適應性強。
CAN節點的分層結構
CAN對象層(the object layer)
CAN傳輸層(the transfer layer)
物理層(the physical layer)
對象層的功能是報文濾波以及狀態和報文的處理。傳輸層是CAN協議的核心。它把接受到的報文提供給對象層,以及接受來自對象層的報文。物理層定義實際信號的傳輸方法。物理層的作用是在不同節點之間根據所有的電氣屬性進行位信息的實際傳輸。
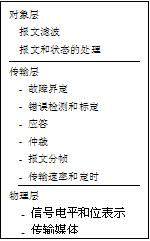
圖1 CAN節點分層結構
LF2407A簡介
DSP(Digital Signal Processing)數字信號處理,是以數字形式對信號進行采集、變換、濾波、估值、增強、壓縮、識別等處理,以得到符合人們需要的信號形式。LF2407A是一款新型工控型數字信號處理芯片,具有如下特點:
一、芯片特點:
1) 32位CPU,32位ALU,16*16位并行乘法器,3個定標移位器,8個16位輔助寄存器;544字片內數據/程序DARAM,2K的SARAM,32K片內程序FLASH,64K數據和存儲器尋址范圍;
2) 四級流水線操作,八級硬件堆棧,五個外部中斷;
3) 兩個事件管理器EVA、EVB,包含:16路PWM通道,10路比較CMP單元,4個16位通用定時計數器,6個捕獲單元CAP,4個積分編碼脈沖QEP單元;
4) 16路10位A/D 轉換,轉換時間為500ns,最高采樣率為1MHz;
5) 41個可單獨編程的多路復用I/O引腳;基于鎖相環電路(PLL)的時鐘模塊;帶實時中斷的看門狗定時器模塊(WATCH_DOG);串行通信接口(SPI)和串行外設接口(SPI),及CAN 通信模塊接口;
6) 33ns指令周期,每秒執行30MIPS,系統+3.3伏供電。
二、LF2407A 內嵌CAN 控制器
LF2407A芯片內嵌CAN控制模塊,集成了一個全CAN功能的16位控制芯片,且與CAN2.0B協議完全兼容,支持標準格式和擴展格式。LF2407A的CAN模塊包含兩大部分:CAN控制/狀態寄存器和CAN郵箱RAM區。其結構框圖如下:
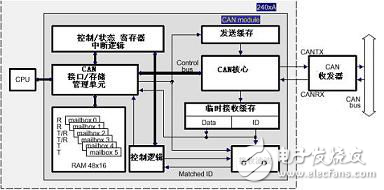
圖 2 LF2407-A CAN模塊框圖
CAN控制/狀態寄存器部分包含16個16位的CAN控制/狀態寄存器,分別為控制寄存器、狀態寄存器、中斷寄存器和接收屏蔽寄存器。完成對象層和傳輸層包括的所有由ISO/OSI 模型定義的數據鏈路層的服務和功能。實現控制幀結構、執行仲裁、錯誤檢測、出錯標定、故障界定等。
CAN 控制器接口----PCA82C250: PCA82C250 是CAN 協議控制器和物理總線的接口。此器件對總線提供差動發送能力,對CAN 控制器提供差動接收能力,符合“ISO11898 ”標準。
系統結構
本系統為一個基于分布式現場總線CAN總線進行通訊,以DSP為微控制器的電機控制系統。為一個具有DSP的高速處理能力和CAN總線通信的高性能和高可靠性的優點結合起來的分布式工業控制系統。系統設計主體分為兩部分:其一執行部件:LF2407-A控制電機動作;其二為網絡通訊:CAN實現分布式監控通信。
CAN(Controller Area Network)控制器局域網,主要用于各種設備監測及控制的局域網。最初由德國Bosch公司用于汽車的監控系統而設計,具有良好的功能特性和極高的可靠性,現場抗干擾能力極強, 總線形式為串行數據通信總線。
TI 的24X系列芯片,具有處理性能優良(30MIPS),外設集成度高,程序存儲器容量大,A/D轉換速度快等特點,是基于工業控制而設計的DSP(數字信號處理)類芯片。LF2407A以其豐富的集成外設,提供了電機數字化控制解決方案。其嵌入式CAN總線控制器,基于CAN2.0B規范要求,提供了CAN通信功能,可為實現分布式工業監控局域網絡提供了一個解決方案。
CAN總線簡介
CAN屬于現場總線的范疇,有效支持分布式控制或實時控制的串行通信網絡。CAN的應用范圍很廣,從高速的網絡到低價位的多路界限都可以使用CAN 。在自動化電子領域的汽車發動機控制部件、傳感器、抗滑系統等應用中,CAN的位速率可高達1Mbps。
區別與傳統的控制系統采用按控制回路進行一對一連接的方法,現場總線采用智能現場設備,具有運算、控制和通信功能,可以在現場完成數據采集、數據分析、控制處理等功能,并將有關數據發送到主機及其它現場設備,實現可徹底的分布式控制。
CAN總線特點:
1系統的開放性。2現場設備具有高度的自治性和智能化的特點。3系統的高度分散性。4對現場環境的適應性強。
CAN節點的分層結構
CAN對象層(the object layer)
CAN傳輸層(the transfer layer)
物理層(the physical layer)
對象層的功能是報文濾波以及狀態和報文的處理。傳輸層是CAN協議的核心。它把接受到的報文提供給對象層,以及接受來自對象層的報文。物理層定義實際信號的傳輸方法。物理層的作用是在不同節點之間根據所有的電氣屬性進行位信息的實際傳輸。
圖1 CAN節點分層結構
LF2407A簡介
DSP(Digital Signal Processing)數字信號處理,是以數字形式對信號進行采集、變換、濾波、估值、增強、壓縮、識別等處理,以得到符合人們需要的信號形式。LF2407A是一款新型工控型數字信號處理芯片,具有如下特點:
一、芯片特點:
1) 32位CPU,32位ALU,16*16位并行乘法器,3個定標移位器,8個16位輔助寄存器;544字片內數據/程序DARAM,2K的SARAM,32K片內程序FLASH,64K數據和存儲器尋址范圍;
2) 四級流水線操作,八級硬件堆棧,五個外部中斷;
3) 兩個事件管理器EVA、EVB,包含:16路PWM通道,10路比較CMP單元,4個16位通用定時計數器,6個捕獲單元CAP,4個積分編碼脈沖QEP單元;
4) 16路10位A/D 轉換,轉換時間為500ns,最高采樣率為1MHz;
5) 41個可單獨編程的多路復用I/O引腳;基于鎖相環電路(PLL)的時鐘模塊;帶實時中斷的看門狗定時器模塊(WATCH_DOG);串行通信接口(SPI)和串行外設接口(SPI),及CAN 通信模塊接口;
6) 33ns指令周期,每秒執行30MIPS,系統+3.3伏供電。
二、LF2407A 內嵌CAN 控制器
LF2407A芯片內嵌CAN控制模塊,集成了一個全CAN功能的16位控制芯片,且與CAN2.0B協議完全兼容,支持標準格式和擴展格式。LF2407A的CAN模塊包含兩大部分:CAN控制/狀態寄存器和CAN郵箱RAM區。其結構框圖如下:
圖 2 LF2407-A CAN模塊框圖
CAN控制/狀態寄存器部分包含16個16位的CAN控制/狀態寄存器,分別為控制寄存器、狀態寄存器、中斷寄存器和接收屏蔽寄存器。完成對象層和傳輸層包括的所有由ISO/OSI 模型定義的數據鏈路層的服務和功能。實現控制幀結構、執行仲裁、錯誤檢測、出錯標定、故障界定等。
CAN 控制器接口----PCA82C250: PCA82C250 是CAN 協議控制器和物理總線的接口。此器件對總線提供差動發送能力,對CAN 控制器提供差動接收能力,符合“ISO11898 ”標準。
系統結構
本系統為一個基于分布式現場總線CAN總線進行通訊,以DSP為微控制器的電機控制系統。為一個具有DSP的高速處理能力和CAN總線通信的高性能和高可靠性的優點結合起來的分布式工業控制系統。系統設計主體分為兩部分:其一執行部件:LF2407-A控制電機動作;其二為網絡通訊:CAN實現分布式監控通信。
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 低功率網絡控制器局域網絡(CAN)收發器SN65HVD1040-HT數據表
- 基于對等監控網絡實現云監控系統解決方案 0次下載
- 基于CAN總線的分布式船舶火災自動監控系統 14次下載
- 控制器局域網(CAN)實施指南 15次下載
- 配置控制器局域網絡(CAN)位時序,優化系統性能 0次下載
- LanManager局域網管家監控軟件
- 信道訪問與局域網
- 基于CAN總線的煤礦安全分布式監控系統
- 以太型局域網絡系統故障檢測與維護
- 分布式環境下CAN網橋的實現和性能分析
- 基于CAN總線的分布式監控系統智能節點設計
- 控制器局域網絡的音頻信號傳輸
- 基于CAN 總線的分布式潛水電機監控系統
- 基于手機無線局域網的架構與應用
- 基于手機無線局域網的架構與應用
- 基于APM32E103 SPI轉CAN芯片MCP2515移植測試 530次閱讀
- 什么是CAN2.0協議? 1381次閱讀
- CAN通訊常見異常及解決方案 1718次閱讀
- 局域網絡內如何掃描已連接設備的信息 1.1w次閱讀
- 詳解Zabbix分布式監控平臺建設 887次閱讀
- CAN總線簡介及優點說明 7066次閱讀
- 基于控制器局域網絡CAN實現高壓開關柜故障檢測系統的設計 780次閱讀
- 基于PIC18F458與PCA82C250芯片實現CAN接口電路的設計 3384次閱讀
- 基于LF2407A芯片和CAN總線實現分布式工業監控局域網絡解決方案 1080次閱讀
- 基于單片機和CAN控制器sja1000實現分布式監控系統設計 1351次閱讀
- canbus和can總線有什么區別 2.5w次閱讀
- CAN4550-Q1汽車CAN FD控制器解決方案 4670次閱讀
- 一文了解無線局域網是什么意思 3.9w次閱讀
- 虛擬局域網的實現方法 1.1w次閱讀
- 基于CAN總線的分布式網架健康狀態監測系統的設計 1027次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1DC電源插座圖紙
- 0.67 MB | 2次下載 | 免費
- 2AN158 GD32VW553 Wi-Fi開發指南
- 1.51MB | 2次下載 | 免費
- 3AN148 GD32VW553射頻硬件開發指南
- 2.07MB | 1次下載 | 免費
- 4AN111-LTC3219用戶指南
- 84.32KB | 次下載 | 免費
- 5AN153-用于電源系統管理的Linduino
- 1.38MB | 次下載 | 免費
- 6AN-283: Σ-Δ型ADC和DAC[中文版]
- 677.86KB | 次下載 | 免費
- 7SM2018E 支持可控硅調光線性恒流控制芯片
- 402.24 KB | 次下載 | 免費
- 8AN-1308: 電流檢測放大器共模階躍響應
- 545.42KB | 次下載 | 免費
本月
- 1ADI高性能電源管理解決方案
- 2.43 MB | 450次下載 | 免費
- 2免費開源CC3D飛控資料(電路圖&PCB源文件、BOM、
- 5.67 MB | 138次下載 | 1 積分
- 3基于STM32單片機智能手環心率計步器體溫顯示設計
- 0.10 MB | 130次下載 | 免費
- 4使用單片機實現七人表決器的程序和仿真資料免費下載
- 2.96 MB | 44次下載 | 免費
- 53314A函數發生器維修手冊
- 16.30 MB | 31次下載 | 免費
- 6美的電磁爐維修手冊大全
- 1.56 MB | 24次下載 | 5 積分
- 7如何正確測試電源的紋波
- 0.36 MB | 17次下載 | 免費
- 8感應筆電路圖
- 0.06 MB | 10次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935121次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉換器 PCB layout 設計
- 1.48MB | 420062次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233088次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191367次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183335次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73810次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網監
工商網監
評論