您的位置:電子發(fā)燒友網(wǎng) > 電子技術(shù)應(yīng)用 > 汽車電子 >
基于GPS-GSM的汽車短信防盜系統(tǒng)設(shè)計(jì)方案(2)
2012年02月19日 12:38 來(lái)源:本站整理 作者:電子大兵 我要評(píng)論(0)
3 系統(tǒng)軟件設(shè)計(jì)
系統(tǒng)流程圖如圖2所示。
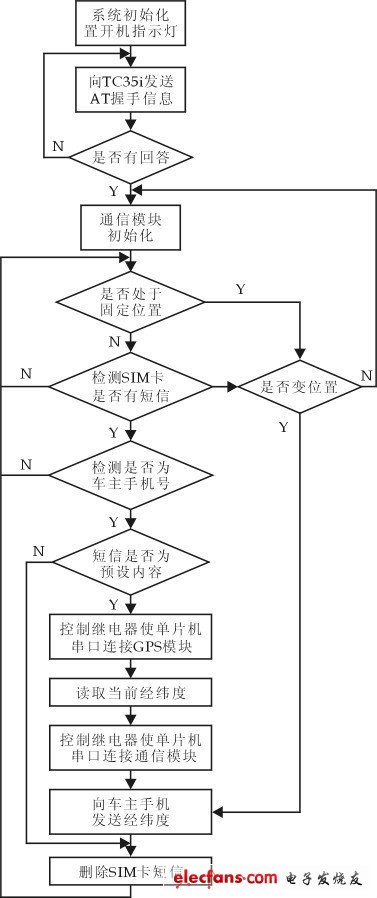
圖2 系統(tǒng)流程及控制框圖
程序:
#include《 P》
#include《 P》
#define OVER 0x0d
#define S_OVER 0x1a
void Delay(unsigned char ms) //延時(shí)子程序
void UART1_Init(void) //串口1初始化
void UART_Init(void)
void SendASC(char ASC)
void ClrRsBuf(void) //清理緩存
void SendToTc35(char*p,unsigned char Long) //發(fā)送命令到TC35
nsigned char idata*mystrstr(char q[],unsigned char qx)//查詢匹配字符
void Rs485_Do(void)interrupt 4using 1 //通訊中斷接收程序
void Send_AT(void) //發(fā)送AT連機(jī)命令
void SetText(void) //設(shè)置文本
unsigned char EraseMsg() //刪除短信息
unsigned char ReadMsg() //讀取短信息
void SendMsgStart(void) //發(fā)送短信息
void UART2_Init(void) //串口2
void Read_Gps(void) //讀GPS
void Check_GPS(unsigned char j,char undercheck[]) //檢查GPS
void main()
{
D11=1; //開(kāi)機(jī)完成
while(1)
{
if(!b){ //是否處于固定位置模式
if(bn){ //檢測(cè)GPS間隔
{
Check_GPS(5,SNalarm_GPS); //分別讀出開(kāi)始和當(dāng)前經(jīng)緯度
if(((aa1-aa2)》80)||((ba1-ba2)》80)) //檢測(cè)位置是否變化
{
b=1; //位置已變,發(fā)送完警告信息,關(guān)閉固定位置模式
}
}
}
}
本文導(dǎo)航
- 第 1 頁(yè):基于GPS-GSM的汽車短信防盜系統(tǒng)設(shè)計(jì)方案(1)
- 第 2 頁(yè):系統(tǒng)軟件設(shè)計(jì)
- 第 3 頁(yè):系統(tǒng)實(shí)物圖及測(cè)試結(jié)果
用戶評(píng)論
發(fā)表評(píng)論
GPS業(yè)界動(dòng)態(tài)
GPS技術(shù)應(yīng)用


GPS資料下載
- 基于GPS和RFID技術(shù)的智能巡檢系統(tǒng)
- 空空導(dǎo)彈GPS飛行軌跡軟件的設(shè)計(jì)與實(shí)現(xiàn)
- 藍(lán)牙的GPS位置信息無(wú)線接入技術(shù)研究
- GPS單孔徑雙極化天線抗干擾算法研究
- GPS測(cè)量與數(shù)據(jù)處理_李征航
- GPS空時(shí)抗干擾中一種改進(jìn)的MWF算法的應(yīng)用
- BD-2_GPS組合系統(tǒng)的設(shè)計(jì)與定位算法
- GPS信號(hào)干擾的Matlab仿真
- 基于GPS無(wú)線定位GSM短信收發(fā)的空間信息查詢系統(tǒng)
- 基于GPS空空導(dǎo)彈飛行軌跡系統(tǒng)設(shè)計(jì)

