 電子發燒友App
電子發燒友App


如果說RFID PEPS是燃油車時代的霸主,BLE PEPS是車聯網時代的翹楚,那么UWB PEPS必將是自動駕駛時代的新貴。UWB憑借精準的測距與定位的優勢,不僅將在車身域PEPS系統智能化升級上率先落地,還將逐漸成為自動駕駛在特定場景特定功能下的關鍵技術支撐。 車身域黑話第二期,作者首先介紹UWB技術特點、發展歷程、測距定位原理,接著呈現主流玩家的UWB PEPS系統方案,最后淺談一下UWB在自動駕駛上的應用前景。
一、技術特點
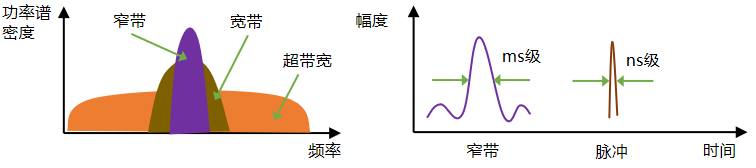
UWB(Ultra Wide Band,超帶寬)技術是一種利用納秒級的脈沖進行數據傳輸的無線通訊技術。UWB因發射的脈沖信號占用一個很寬的頻譜范圍(>1GHz)而得名超帶寬。
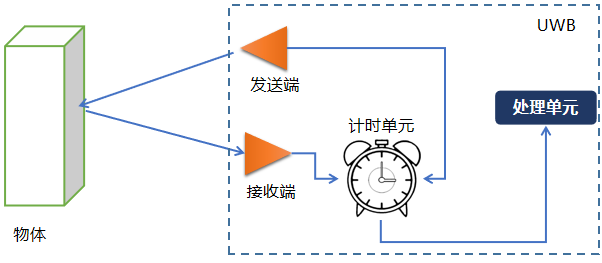
UWB的測距方法和當前絕大多數激光雷達的測距方法一樣,均為ToF(Time of Flight,飛行時間)方法。發送端發射一個脈沖信號,打到物體后返回,接收端接收到發射信號后計算兩者之間接收時間差,并通過乘以光速來實現物體之間距離的測量。
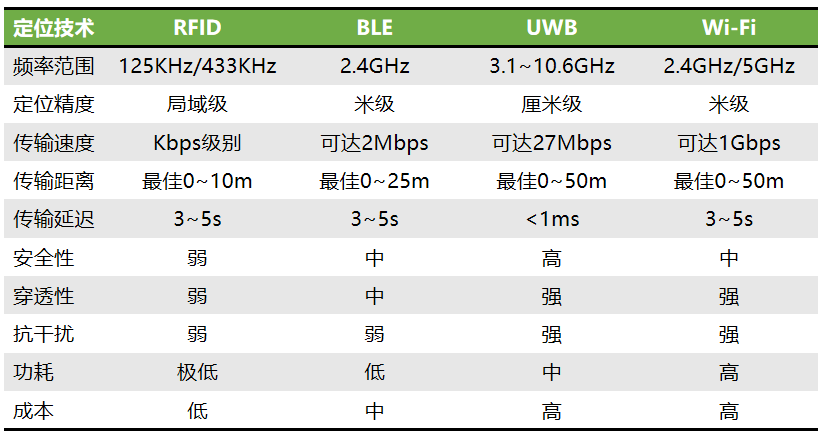
下面這張圖匯總了UWB與前文介紹的RFID/BLE/Wi-Fi無線通訊技術的主要不同點。RFID/BLE/Wi-Fi技術通過在一個標準窄帶上用載波(調制正弦波)傳輸信息并依據信號強度判斷設備之間距離,UWB與之相比具有如下幾個典型優勢。
(1)安全性高。基于ToF原理的測距,測量的是真實物體的反射信號,這樣一來黑客就沒辦法使用一個不在場設備偽造一個信號來與UWB設備通信(BLE基于信號強度值測量的原理,很容易被黑客偽造的一個強度信號欺騙)。屬于含著避免中繼攻擊的魔法誕生。IEEE 802.15.4z標準更是在信號的PHY包中添加了加密和隨機數等保護機制,進一步增強了UWB通信的安全性;
(2)定位精度高。和標準窄帶信號相比,UWB脈沖信號的上升和下降時間更短,測量脈沖反射回來的到達時間會更加精確,目前可實現厘米級定位精度,比BLE高約100倍;
(3)帶寬大。理論傳輸速率可以做到很高,但受功率密度限制,傳輸速率通常在幾十Mbps到幾百Mbps之間,目前可達27Mbps,隨著標準的完善,有望進一步提高。同時由于秒脈沖信號功率密度小,因此傳輸距離通常被限制在10m范圍內;
(4)抗干擾能力強。UWB在時域上的脈沖很窄,所以在時間和空間上有較大分辨力,基本不受噪聲影響;且超帶寬又決定多徑分辨能力強,能夠分辨并剔除大部分多徑干擾信號的影響。
二、發展歷程
20世紀60年代,UWB技術首次出現在軍事、雷達領域的時域電磁學的研究之中,并一直在軍事領域發光發熱。 2002年的時候,FCC(Federal Communications Commission,美國聯邦通訊委員會)宣布在嚴格限制下,將公眾通信頻段3.1GHz~10.6GHz,共7.5GHz的頻帶開放給UWB。同時限定了遠低于BLE/Wi-Fi的輻射功率,-43.1dBm。至此,UWB正式向民用領域開放,也迎來第一次發展高峰。 基于大帶寬、低功耗的特點,大家最初設想的是如何利用UWB打造一個10m內的短距高速無線局域網,但由于技術路徑始終沒有達成一致,而作為競爭者的WI-Fi技術發展迅猛,UWB最終退出了高速無線局域網傳輸這個舞臺。 就這樣臥薪嘗膽多年之后,UWB終于在定位領域迎來了翻身。高帶寬的特點決定了定位精度較高。
2019年,蘋果發布的iPhone11系統上已預置搭載了UWB技術的芯片Apple U1,UWB借此進入到主流消費電子領域。2020年8月25日,IEEE 802.15.4z定稿,標準對定位安全性做了改進,理論上進一步降低被黑客入侵和篡改的概率,進一步為UWB PEPS的應用鋪平道路。 2021年7月CCC(The Car Connectivity Consortium,國際車聯網聯盟)發布了3.0規范,定義了第三代數字鑰匙的互聯方案。UWB、BLE、NFC將在不同場景下分工合作,實現更加智能安全的身份識別、進出控制和點火控制。其中BLE用于遠距車輛喚醒和傳輸授權,UWB用于在喚醒后精確定位用戶位置,NFC用于手機沒電情況下的備用方案。 2022 Q1交付的蔚來ET7,將是全球首款配備UWB PEPS的新車,拉開了UWB PEPS系統裝車的序幕。
三、測距方法
根據應用場景對測距精度要求的不同,UWB定義有兩種測距的實現方式,SS-TWR(Single Sided - Two-Way Ranging,單邊雙向測距)和DS-TWR(Double Sided - Two-Way Ranging,雙邊雙向測距)。
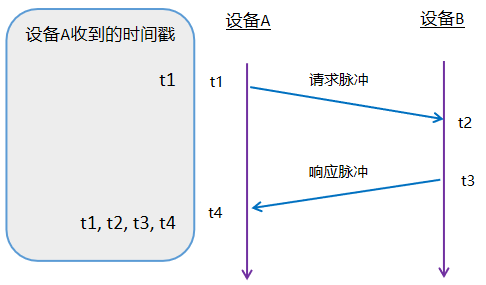
在SS-TWR方法中,如上圖所示,設備A在t1時刻發送請求性質脈沖信號,同時記錄發送時間戳。經過傳輸延時后,設備B在t2時刻接收到該脈沖信號,內部處理后在t3時刻發送一個響應性質的脈沖信號,響應脈沖中包含收到請求脈沖和發送響應脈沖時刻記錄的時間戳t2和t3。設備A收到設備B響應性質的脈沖信號后,記錄此時的時間戳t4。在設備A和設備B本地時鐘完成精確時間同步后,設備A和設備B之間的距離D可由如下公式獲得。

從SS-TWR實現原理中可以看出,兩設備之間時間同步的精度,直接影響測距的精度。據測算,1ns的同步精度誤差將帶來0.3m左右的測距誤差,而納秒級的時間同步精度在當前很多UWB設備之間根本無法達到。為了降低對時間同步精度的依賴,DS-TWR方法應運而生。
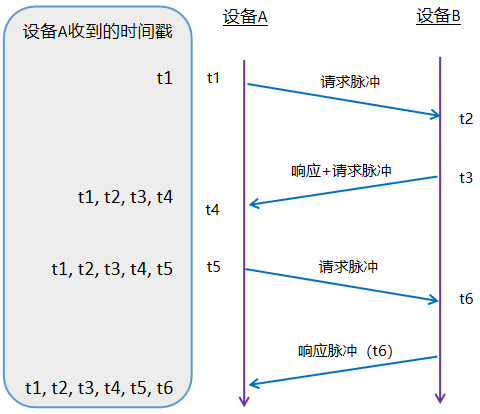
在DS-TWR方法中,如上圖所示,第一步請求脈沖和SS-TWR方法一樣,不同的是,設備B返回的是響應+請求脈沖信號。設備A在收到這個信號之后并沒有停止,而是內部處理之后馬上再次發送一個請求脈沖信號。設備B在接收到這個請求脈沖信號之后記錄接收時間戳,并通過響應脈沖告訴設備A這個時間戳。至此一個完整的DS-TWR過程才算結束,并可通過如下公式計算設備A和設備B之間的距離D。

四、定位方法
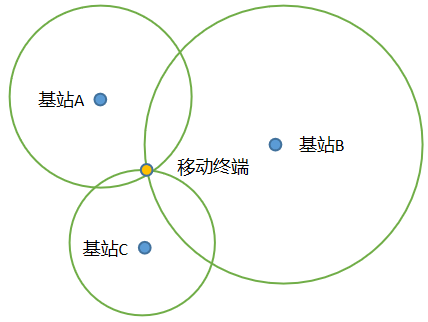
UWB目前有三種比較成熟的定位算法,TOA(Time of Arrival,到達時間)、TDOA (Time Difference of Arrival,到達時間差)和 AOA(Angel of Arrival,到達角度)。具體實現過程中,一般會采用融合三種定位方法的混合定位方案,實現最優定位性能。 TOA采用圓周定位法,通過測量移動終端與三個或更多UWB基站之間的距離來實現定位。通過三圓相交于一點可確定移動終端的位置。然而由于多徑、噪聲等現象存在,會造成多圓無法相交或相交不是一個點而是一個區域,因此實際上很少單獨使用TOA定位。
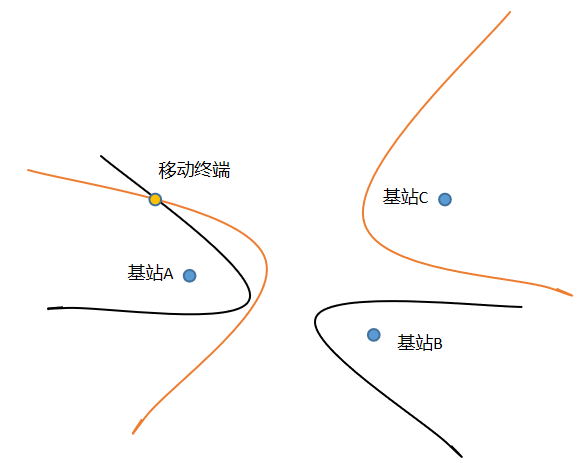
TDOA基于TOA進行了改進,對基站進行精確時間同步,這是容易實現的,而不關心移動終端與基站之間的時間同步。首先計算出移動終端與基站A和基站B之間的距離差,則移動終端必定在以基站A和基站B為焦點,與焦點距離差恒定的雙曲線上。再通過移動終端與基站A和基站C之間的距離差,可得另一組雙曲線,而雙曲線的交點就是移動終端的位置。在車輛空間范圍內,通過距離差的方式還可以減少多徑、噪聲等的影響。
AOA定位基于相位差的原理計算到達角度,只需要兩個基站即可實現定位。由于涉及到角度分辨率問題,因此定位精度隨基站距離的增加而降低,多用于中短距離的定位。
五、系統方案
(1)互聯PEPS方案
以CCC3.0規范為理論指導,通過UWB、BLE、NFC的優勢互補,實現互聯的第三代數字鑰匙方案。典型系統方案為大陸在2020年8月發布,并已于2021年寶馬5系車型上量產的互聯PEPS方案。如下圖所示,整套方案布置7個UWB節點和3個BLE節點,其中4個UWB節點位于前大燈和后尾燈處,3個UWB節點依次布置在前艙到尾門的車頂中間位置,3個BLE節點的位置與車頂3個UWB位置相近。
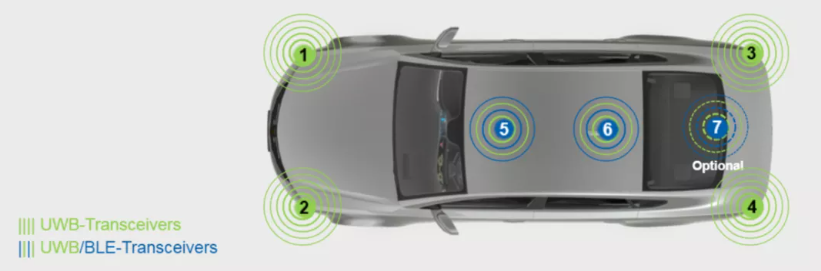
當車主攜帶智能鑰匙靠近車輛,在最遠80米的位置,車輛BLE節點就可以探測到智能鑰匙BLE信號。車輛BLE節點喚醒車身域控制器,車身域控制器控制迎賓燈緩緩亮起,從而進入迎賓狀態。于此同時,車輛UWB節點被喚醒,在車主攜帶的智能鑰匙與車輛的距離小于10m時,車輛UWB節點通過定位手段可以實時精準感知到車主的位置,此時車主只要拉動車門就能自動解鎖。此外,車輛也會配備NFC近場通訊的功能,在智能鑰匙沒電等特殊情況下,可以采用NFC近場通信解鎖、啟動車輛。

(2)PEPS+AVP方案
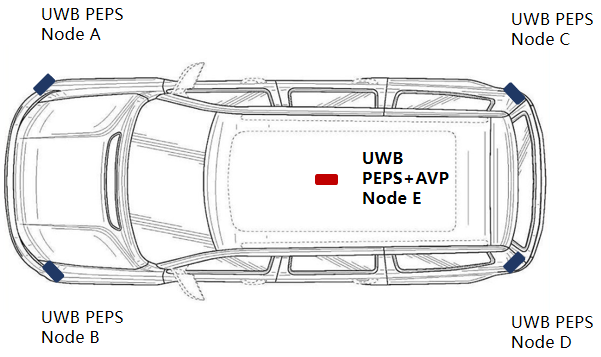
UWB的精準定位優勢在自動駕駛泊車領域迎來越來越多的關注,如果通過復用PEPS功能的UWB節點,實現AVP功能,可謂是一石二鳥,項目總工聽了半夜都能笑醒。 中電星辰就提供了這樣一種能讓項目總工半夜笑醒的UWB PEPS+AVP方案。一種可行的車端UWB節點布局方案如下圖所示。前大燈和尾燈處共放置四個UWB PEPS節點,車頂放置第五個UWB PEPS+AVP節點。第五個節點既可以接收車內的UWB信號,也能接收車外的UWB信號,而且也是實現AVP功能的關鍵節點。
工作在PEPS模式時,第五個UWB節點和其它四個UWB節點一起,協同合作,完成智能鑰匙位置的測量,并將測距信息發送給車身域控制器,完成智能鑰匙位置的計算,從而決定后續的解鎖和啟動操作。 工作在AVP模式時,第五個節點就開始不斷地接收停車場里鋪設的UWB節點播發的UWB定位報文,報文中包含有停車場停車位的信息,類似GNSS定位信號里的經緯度信息。車端UWB節點將收到的定位報文送入智駕域控制器中,從而實現車輛在車庫內的坐標計算,并進一步輸入給規劃控制模塊,用于AVP功能的實現。 第五個節點在設計的時候,考慮到AVP功能要面對的復雜場景,故射頻性能會比其它四個UWB節點更好一點。目前中電星辰可實現不低于50米的車庫UWB節點發射的信號。
(3)PEPS+腳踢雷達+活體檢測方案
如果說復用PEPS UWB節點實現AVP功能,考慮到停車場端基建的支持,還不是一時半會可以大規模應用的功能。那么復用PEPS UWB節點實現腳踢門動作檢測及車內生命體征檢測,則是務實更迫切的需求。 清研訊科提供了這樣一套解決方案,通過搭配BLE節點實現在20m范圍車輛與車主智能鑰匙的身份校驗與認證工作,并激活UWB節點啟動精準定位功能。在智能鑰匙距離車輛3~10m范圍時,可觸發車輛迎賓功能而自動開啟車燈。當車輛UWB節點檢測到智能鑰匙在車輛1~3m范圍內時,可自動解鎖車門,同時伴隨轉向燈閃爍、喇叭短響的提示。當用戶進入車內,只需一鍵啟動按鈕便可以啟動車輛。 更為重要的是這套方案通過復用車內UWB天線可實時檢測車內生命體征狀態,包括動態人體動作和靜態人體呼吸,從而實現人員、寵物逗留提醒,實現智能化的活體檢測。通過復用車左后或右后UWB節點,可實現精確檢測腳踢門動作,從而實現后備箱自動打開功能。
六、小結
我們正處在汽車百年未有之大變局,汽車在大踏步的向智能化邁進。然而所有的技術并不是一蹴而就,事物的發展需要結合天時地利人和,是一個循序漸進的過程。正如在很多年前就已經出現的BLE和UWB技術,也成功應用到了工業、軍事等各個細分領域,但是并沒有應用到汽車的PEPS系統。 不知道是哪位前輩,第一個想到把BLE和UWB技術應用到汽車的PEPS系統。作為一名工程師,擁有這樣的能力那是可遇而不可求。這不僅需要有深厚的基礎技術功底,還需要有一顆奇思妙想的頭腦。這怕也是只有深耕細作,精益求精才能獲得的頓悟。
編輯:黃飛
?








 工商網監
工商網監
評論