 電子發燒友App
電子發燒友App


“自動駕駛技術”是IT行業對汽車行業的一次主動跨界,所以你才會覺得“無人駕駛”的氣質那么像IT,因為無論從技術還是媒體宣傳,幾乎都是按照IT界的玩法來的,特點就是新聞多、玩概念的也比較多、風口比較多,可能成功,當然,也可能過兩年就黃了……
IT行業試圖將汽車行業統領在自己的大數據、云計算、互聯網……概念之下,但是,由于汽車事關人命,汽車產業和國民經濟關系巨大,所以,互聯網的這種玩法,勢必也會遭到汽車安全領域現有規則的質疑和抵觸,至于結果如何,我們還是拭目以待吧!
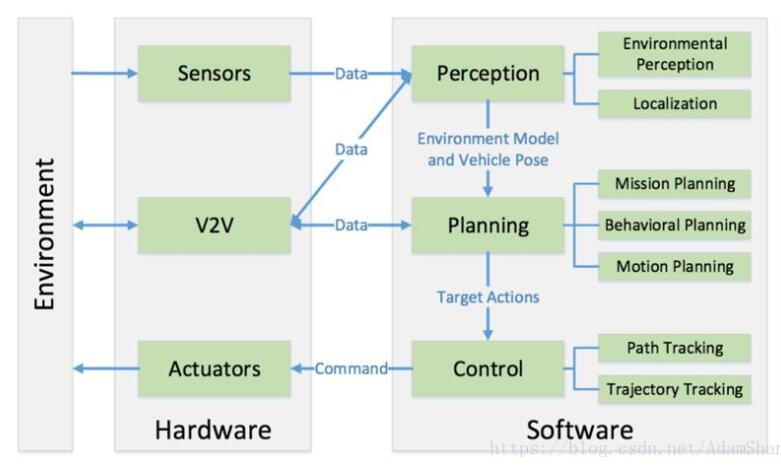
無人駕駛的基本原理非常簡單,當前技術水平下,它的正式名稱等同于“先進駕駛輔助系統”(Advanced Driver Assistant System),小名ADAS。
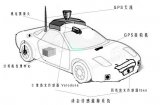
ADAS系統包含信息采集設備和ADAS控制器,信息采集設備主要是各種攝像頭、超聲波雷達、激光雷達等一堆東西,ADAS控制器就是一個控制器,負責處理這些攝像頭、雷達信號,并對車輛發送“轉彎”、“加速”、“停車”之類的控制命令。
說著簡單,但是做起來還是有很大工作量的。
接下來,我們直奔主題,我們看看,搞一個無人駕駛汽車,車企和ADAS供應商分別需要做什么。
對于車企而言,顯而易見,需要開放車輛的控制接口,把之前由駕駛員進行的各種操作,比如踩踏板、打方向盤、踩剎車、打轉向燈等動作,轉換成由ADAS控制器來發命令,去控制。
一般而言,車企需要和無人駕駛供應商對接好CAN協議,并對人工操作的機械運動部件進行一些必要的修改,比如給踏板增加一個伺服電機,讓它根據ADAS控制器的命令來控制踏板踩下一定的深度。
對于ADAS供應商而言,說實話,需要做的工作比較多。總體而言,供應商需要開發ADAS控制器的算法,對采集到的多種傳感器信號進行正確的處理,并控制車輛作出合適的動作。
接下來,我們來重點討論一下,ADAS的HIL測試,應該怎么做?
談到這個問題,車企的朋友們難免會憂桑,因為這種技術集中度非常高的、深度大、廣度小的產品系統,測試工作事實上主要是由供應商來做的,車企很少有能力做,而且即使做了,自己也不是很有信心,還是要依據供應商說的來。
坊間流傳著一個段子,說某個車企,打聽到了博世ESP部門用的是ETAS的HIL做測試(其實這個根本不用打聽,猜都能猜得到,同屬于一個集團的嘛),然后興沖沖地買了一套ETAS的HIL設備,準備等ESP系統到貨之后,做一下ESP系統的HIL測試。結果博世ESP部門說,“我們都做好了,你們做啥做?不用做!”“你們想做你們就自己做,但是我們不會提供任何支持!”,然后這個車企就傻眼了,買來的HIL就成為擺設了。
可能博世ESP部門覺得車企做ESP系統的HIL意義不大,還浪費時間~
對于ADAS系統而言,大多數車企的處境相比ESP的例子,好不到哪里去~
ADAS控制器的算法是其核心,這是一個需要經過千錘百煉、不斷優化、大量測試之后,才敢上車的控制器軟件。車企所做的ADAS測試,覆蓋率太低,也很難找到連供應商都還沒有發現的bug。而且,ADAS的這些算法源碼,車企一般是拿不到的,所以由車企去優化代碼也有一定的操作困難。因此,倒不如好好對接、配合供應商,借助于實力較強的供應商的N多項目經驗、技術積累,確保ADAS系統成熟可靠!
當然,這個做法不適用于部分決心在ADAS控制算法領域有所建樹的企業,因為這樣的企業理想遠大,并且投入了大量的財力人力去自主開發ADAS算法。不僅要超越競爭對手車企,而且還要超越競爭對手車企的供應商,從而徹底拉開差距,讓對手再也沒有機會。但是這樣的企業好像不多,大家可以留言,看看國內有多少這樣的企業,自主開發ADAS算法并用到量產車上的。
我們再看看,ADAS系統HIL測試領域的幾個模式。
第一個模式,高校科學研究,或者企業樣板工程,主要供實驗室演示使用,或者寫論文做研究,基本不具備實車應用價值,我們稱其為“王子”。
這種ADAS HIL測試,其最重要的特點是,它不需要實車錄制的視頻文件,它的“場景”,是由一個叫“場景軟件”的東西生成的。如果您不太理解場景軟件的用處,那您想象一下考駕照時候用過的駕駛模擬軟件,你在屏幕上所能看到的,就是“場景”,這個軟件,就可以稱作一個“場景軟件”。
場景軟件把生成的“場景”,轉化成視頻,然后,通過視頻注入板卡,把視頻發送給ADAS控制器。ADAS控制器對其進行處理之后,會把對車輛的“轉彎”、“加速”之類的命令通過CAN總線發給場景軟件PC,場景軟件控制汽車在場景中實現“轉彎”、“加速”等動作,就可以實現“基于場景軟件的ADAS無人駕駛”了。
這是一個幾乎不具備商用價值的ADAS測試方案,因為它的信息來源就不是真實的駕駛環境,而是由“場景軟件”生成的。視頻圖像質量非常理想化,沒有雪花毛刺,沒有霧靄蒙蒙、電閃雷鳴,沒有行人突然闖紅燈,也沒有寶馬車燈突然亮起,甚至整個賽道都沒有別的車輛……
這樣一個ADAS測試方案,主要應用領域還是高校理論研究,這種理論研究的目的本來就不是為了商用,而是為了在某一技術點上,取得研究突破,發現新方法、新理論,為產業界、工程界提供理論支持。
當然,企業也有可能使用這種ADAS測試方案,但目的主要是為了樣板工程建設、演示,對實際車輛開發沒有多大用處。
第二個模式,商業應用的ADAS測試。其最大的特點是,拋棄了“場景軟件”,改用實車錄制的視頻圖像數據(以及雷達、超聲波傳感器信號等等),相對辛苦一些,我們稱其為“草民”。
此種模式下,ADAS測試方法也有多種,簡單地說,比如學習、訓練;復雜了說,比如人工標記。
所謂“學習、訓練”,就是由人工開車,車上裝一些攝像頭,跑個幾百幾千公里,然后把錄像拿回實驗室,讓ADAS控制器去學習。ADAS控制器學習的終極目標,就是能跑出和人工駕駛同樣的軌跡,其方法就是識別視頻里面的各類物理,對ADAS控制器內部的大量參數進行不斷地迭代、優化,從而最終實現“仿生”駕駛,使ADAS控制器“計算”出來的軌跡,和視頻中的真實軌跡相一致。
所謂人工標記,是一個更加細致的測試階段,主要做法就是,對視頻進行人工標記,由工程師先代替ADAS控制器,查看視頻,并對需要處理的對策進行期望值標記。說白了,就是,一個合格的駕駛員,人工開車的時候,看到這樣的視野場景,應該怎么反應,是加速還是減速,是轉向還是剎車還是鳴笛,標記下來。把人應該有的正確操作,標記在視頻的時間軸上,當然,這些“操作”,在無人駕駛模式下往往以“信號變量”的形式出現。然后,我們就通過視頻回放設備,把視頻輸入給ADAS控制器,然后在同一個時間坐標系下,核對ADAS控制器的反應是不是正常的(普遍使用自動化測試的方式),各個信號變量的值,對不對,從而為算法的進一步優化提供依據。
幾乎全部的ADAS供應商,都是采用這種“視頻回放”的ADAS的測試方案,畢竟,軟件算法是要上車商用的,雖不需要高深理論,但是要求工程上成熟可靠,搞一些場景軟件來測試,可不行。
在這個領域,全球最優秀的選手叫英偉達(NVIDIA),沒錯,就是你電腦上顯卡的供應商,而且創始人還是個華人。英偉達這個公司幾乎包攬了全世界圖形圖像處理領域所有的最先進技術,在無人駕駛領域更是當之無愧的王者,百度、華為、特斯拉什么的,在這個領域全是它的小弟。
攝像頭和ADAS控制器之間,傳輸視頻所使用的協議類型一般為LVDS(low voltage differ signal),比如GMSL、FPDLink、APIX等協議。在攝像頭端,通過serializer模塊,把YUV、RBG等數據轉換成APIX協議數據,到了ADAS控制器端,通過deserializer模塊,把APIX協議數據還原,給ADAS控制器進行處理。
我們在做ADAS控制器的測試的時候,就可以通過這樣的模塊(視頻回放板卡),把視頻文件轉化成LVDS協議信號,發給ADAS控制器,用于訓練ADAS控制器,或者用于對ADAS的控制信號進行比對(對于車企而言,雖然做ADAS無人駕駛測試,比不上ADAS供應商,但是,也是值得去嘗試的,有利于車企建立這方面的能力)。
當然,這種LVDS協議信號仿真模塊,其意義不僅僅是針對ADAS測試,它對車載多媒體模塊、儀表、中控等各種需要傳輸圖像、視頻的模塊,都非常有用,它既可以仿真信號源,也可以仿真信號接收處理模塊,可以協助工程師在缺少對端模塊的情況下,通過仿真來完成對自身模塊的測試。
按照我們對HIL本質的理解,HIL是一個虛實結合的系統,在缺少“周圍件”的情況下,通過板卡或設備模擬出“周圍件”,形成一個有機的交互體,都應該稱作HIL。我們通常概念中針對發動機控制器ECU、VCU、BMS的HIL,只是HIL針對多管腳單片機控制器的一類應用而已。
? ? ? ?責任編輯:tzh

























 工商網監
工商網監
評論