聚豐項目 > 基于WiFi的四軸無人機
本項目是基于大賽提供的Stm32F401-Nucleo開發板與四軸F450無人機設計的。通過在無人機機架上搭載WiFi—EMW3080模塊,控制無人機飛行。
![]() BigI
BigI
![]() BigI
BigI
團隊成員
洪全輝 學生
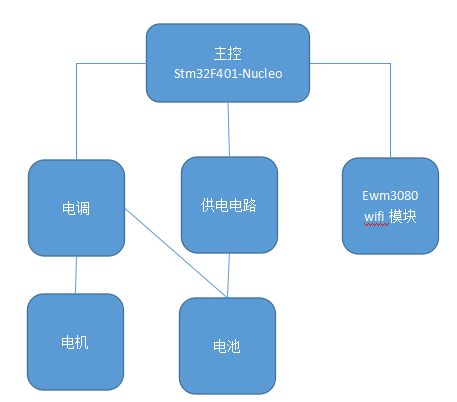
硬件設計上包括主控模塊,電調,無線遙控接收器,超聲波模塊和Ewm3080 wifi模塊等。硬件框圖如下圖1所示

圖1
主控模塊采用的是大賽提供的Stm32F401-Nucleo開發板,如圖2所示。其具有以下優勢:
1. STM32F401RET6微控制器,基于ARM Cortex-M4處理器,帶DSP,最高支持84MHz主頻
2. 支持Arduino UNO R3 Shield擴展板,微控制器所有IO口引腳通過排針座引出
3. ST-LINK/V2-1調試器,支持對外部微控制器調試
4. 3個LED:一個USB通訊LED、一個電源LED、一個用戶LED;兩個機械按鍵:復位、用戶
5. USB接口的3個不同功能:虛擬串口、容量存儲、調試接口
6. 3種不同供電方式:mini USB接口供電、IO引腳用電、通過Arduino UNO R3 Shield接口供電
7. 支持Keil、IAR、embed在線IDE的設計工具
STM32F401 Nucleo開發板包含了STM32F系列板卡慣有的機械按鍵、LED指示燈、mini USB調試接口,眾多IO口外設通過排針座引出等功能,除此之外,也有與眾不同之處,如兼容Arduino Shield接口,并且可以通過Arduino Shield擴展接口給板卡供電,板卡搭載STM32F401RET6核心微控制器,基于32位的高性能ARM Cortex-M4處理器,帶FPU單元,最高能支持84MHz主頻。

圖2
供電系統分為12V轉5V,12V轉3.3V,皆采用開關電源進行穩壓給各項子功能電路使用,如圖3所示


圖3
EMW3080模塊是單3.3V供電的、集成Wi-Fi和Cortex-M4F MCU的嵌入式Wi-Fi模塊,最高支持133M主頻和256K RAM,強大的浮點運算,為客戶固件的完整性、合法性,以及與云端通信的安全性提供硬件加密保障,如圖4所示


圖4
軟件使用了MDK4.74平臺對STM32F207進行開發和代碼編譯下載,手機使用APP與WIFI模塊進行通信,相關文檔資料和程序代碼會以附錄的形式上傳。
在實際調試過程中我們發現不同的姿態解算,數據融合方法對飛行器的穩定性的影響很大,我們使用了Mahony四元數解算。四軸姿態的表示可以用歐拉角,也可以用四元數。姿態檢測算法作用就是將加速度計、陀螺儀,磁力計的測量值解算成姿態,進而作為系統的反饋量。在獲取傳感器值之前需要對數據進行濾波,濾波算法主要是將獲取到的陀螺儀和加速度計的數據進行去噪聲及融合,得出正確的角度數據(歐拉角或四元數),主要采用互補濾波或者卡爾曼濾波。


![]()


(6.76 MB)下載
BigI: 不錯
回復
 工商網監
工商網監