聚豐項目 > 基于AB32的倒立擺欠驅動控制系統設計
該項目基于AB32微處理器,運行RT-Thread操作系統,實現了旋轉倒立擺的自平衡控制。倒立擺模型是自動控制領域非常經典的控制模型,其自身能提供的力和其自由度不相等因為被稱作為欠驅動控制系統。其力學平衡原理與火箭控制,飛行器控制等一致,因此倒立擺模型是非常好的控制算法驗證平臺,是對現實生活中非線性系統的很好抽象。 本設計對控制系統的實時性要求較高,尤其是軟件層面。在硬件層面,AB32微控制器提供了強大的外設支持,運行的高速性也保證了算法運算的速度。并且RT-Thread操作系統強大的系統組件和開發環境支持也使得系統的實時性得以保證。
![]() yijuanzhi
yijuanzhi
![]() yijuanzhi
yijuanzhi
團隊成員
yijuanzhi 工程師
本設計硬件上采用了減速電機,,霍爾編碼器,高精度電位器,以及倒立擺相關的金屬結構件(外購),硬件上采用了AB32開發板,同時使用了上位機助手來顯示參數和系統運行狀態。由于AB32開發板上已經引出了按鍵等簡單的交互模塊,所以沒有額外增加更多的功能外設。
本設計軟件上主要采用了RT-Thread操作系統,使用到了該系統中的UART設備,ADC設備,SPI設備,PWM設備,TIM設備等相關的軟件設備驅動。
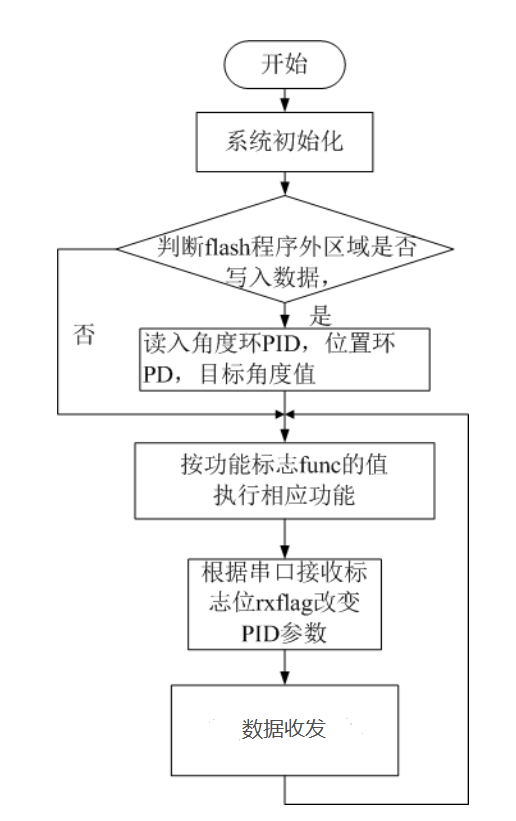
整體程序設計包括了兩個線程,其中一個負責實時采集數據并進行運算,另一個負責實時傳輸和顯示數據用于調試,同時根據用戶輸入狀態來對參數進行切換與改變。在控制算法方面主要采用了PID算法,對實時速度和實時角度構建了兩個雙閉環的PID控制器,同時進行位置和角度的控制,實現倒立擺的自平衡。






 工商網監
工商網監