 電子發燒友App
電子發燒友App


第二十三節 藍牙協議棧之主機通訊
隨著藍牙4.0模塊的大量使用,為了很多從未接觸過藍牙的工程師也能快速便捷地開發藍牙項目或者使用藍牙,主從一體、遠控IO等等特性也成為藍牙模塊必 備的條件。其實,聯合第二十一節和本節(第二十二節),我們就能將一個本無固件的裸片藍牙,使其開發為具備主從一體功能的藍牙模塊。這兩節的內容,也是本 連載篇的重點部分之一。
上一節我們對從機的工作流程有了一個整體的把握。我們現在接著來看主機的工作流程。
主機的工作主要是掃描設備,對發現的設備發起連接,然后就是對特征值的讀寫操作了。
手動連接
從機的對外廣播是在初始化的時候完成的,那主機的掃描是在哪里開始的呢?閱讀源碼可以發現主機的操作都在按鍵處理中完成的。主機通過五向按鍵中的五個按鍵實現不同的功能。
static void simpleBLECentral_HandleKeys( uint8 shift, uint8 keys )
{
(void)shift; // Intentionally unreferenced parameter
if ( keys & HAL_KEY_UP ) // 向上
{
// Start or stop discovery
if ( simpleBLEState != BLE_STATE_CONNECTED ) // 如果沒有連接,開始掃描
{
if ( !simpleBLEScanning )
{
simpleBLEScanning = TRUE;
simpleBLEScanRes = 0;
LCD_WRITE_STRING( “Discovering.。。”, HAL_LCD_LINE_1 );
LCD_WRITE_STRING( “”, HAL_LCD_LINE_2 );
GAPCentralRole_StartDiscovery( DEFAULT_DISCOVERY_MODE,
DEFAULT_DISCOVERY_ACTIVE_SCAN,
DEFAULT_DISCOVERY_WHITE_LIST );
}
else
{
GAPCentralRole_CancelDiscovery();
}
}
else if ( simpleBLEState == BLE_STATE_CONNECTED && // 如果連接并且發現Handle進行讀寫操作
simpleBLECharHdl != 0 &&
simpleBLEProcedureInProgress == FALSE )
{
uint8 status;
// Do a read or write as long as no other read or write is in progress
if ( simpleBLEDoWrite )
{
// Do a write
attWriteReq_t req;
req.handle = simpleBLECharHdl;
req.len = 1;
req.value[0] = simpleBLECharVal;
req.sig = 0;
req.cmd = 0;
status = GATT_WriteCharValue( simpleBLEConnHandle, &req, simpleBLETaskId );
}
else
{
// Do a read
attReadReq_t req;
req.handle = simpleBLECharHdl;
status = GATT_ReadCharValue( simpleBLEConnHandle, &req, simpleBLETaskId );
}
if ( status == SUCCESS )
{
simpleBLEProcedureInProgress = TRUE;
simpleBLEDoWrite = !simpleBLEDoWrite;
}
}
}
if ( keys & HAL_KEY_LEFT ) // 左
{
// Display discovery results
if ( !simpleBLEScanning && simpleBLEScanRes > 0 ) // 顯示掃描到的設備
{
// Increment index of current result (with wraparound)
simpleBLEScanIdx++;
if ( simpleBLEScanIdx >= simpleBLEScanRes )
{
simpleBLEScanIdx = 0;
}
LCD_WRITE_STRING_VALUE( “Device”, simpleBLEScanIdx + 1,
10, HAL_LCD_LINE_1 );
LCD_WRITE_STRING( bdAddr2Str( simpleBLEDevList[simpleBLEScanIdx].addr ),
HAL_LCD_LINE_2 );
}
}
if ( keys & HAL_KEY_RIGHT ) // 右
{
// Connection update
if ( simpleBLEState == BLE_STATE_CONNECTED ) // 如果連接,則更新連接
{
GAPCentralRole_UpdateLink( simpleBLEConnHandle,
DEFAULT_UPDATE_MIN_CONN_INTERVAL,
DEFAULT_UPDATE_MAX_CONN_INTERVAL,
DEFAULT_UPDATE_SLAVE_LATENCY,
DEFAULT_UPDATE_CONN_TIMEOUT );
}
}
if ( keys & HAL_KEY_CENTER ) // 中間鍵
{
uint8 addrType;
uint8 *peerAddr;
// Connect or disconnect
if ( simpleBLEState == BLE_STATE_IDLE ) // 空閑則連接
{
// if there is a scan result
if ( simpleBLEScanRes > 0 )
{
// connect to current device in scan result
peerAddr = simpleBLEDevList[simpleBLEScanIdx].addr;
addrType = simpleBLEDevList[simpleBLEScanIdx].addrType;
simpleBLEState = BLE_STATE_CONNECTING;
GAPCentralRole_EstablishLink( DEFAULT_LINK_HIGH_DUTY_CYCLE,
DEFAULT_LINK_WHITE_LIST,
addrType, peerAddr );
LCD_WRITE_STRING( “Connecting”, HAL_LCD_LINE_1 );
LCD_WRITE_STRING( bdAddr2Str( peerAddr ), HAL_LCD_LINE_2 );
}
}
else if ( simpleBLEState == BLE_STATE_CONNECTING || // 連接則斷開連接
simpleBLEState == BLE_STATE_CONNECTED )
{
// disconnect
simpleBLEState = BLE_STATE_DISCONNECTING;
gStatus = GAPCentralRole_TerminateLink( simpleBLEConnHandle );
LCD_WRITE_STRING( “Disconnecting”, HAL_LCD_LINE_1 );
}
}
if ( keys & HAL_KEY_DOWN ) // 下
{
// Start or cancel RSSI polling
if ( simpleBLEState == BLE_STATE_CONNECTED ) // 連接則讀取RSSi的值
{
if ( !simpleBLERssi )
{
simpleBLERssi = TRUE;
GAPCentralRole_StartRssi( simpleBLEConnHandle, DEFAULT_RSSI_PERIOD );
}
else
{
simpleBLERssi = FALSE;
GAPCentralRole_CancelRssi( simpleBLEConnHandle );
LCD_WRITE_STRING( “RSSI Cancelled”, HAL_LCD_LINE_1 );
}
}
}
}
因為從機一直處于廣播狀態,所以秩序將上一節中的從機程序燒錄進開發板即可,然后將主機程序燒錄到另外一快開發板,通過五向按鍵來實現和從機的連接和讀寫功能。
(1) 上電提示
從機上電提示:
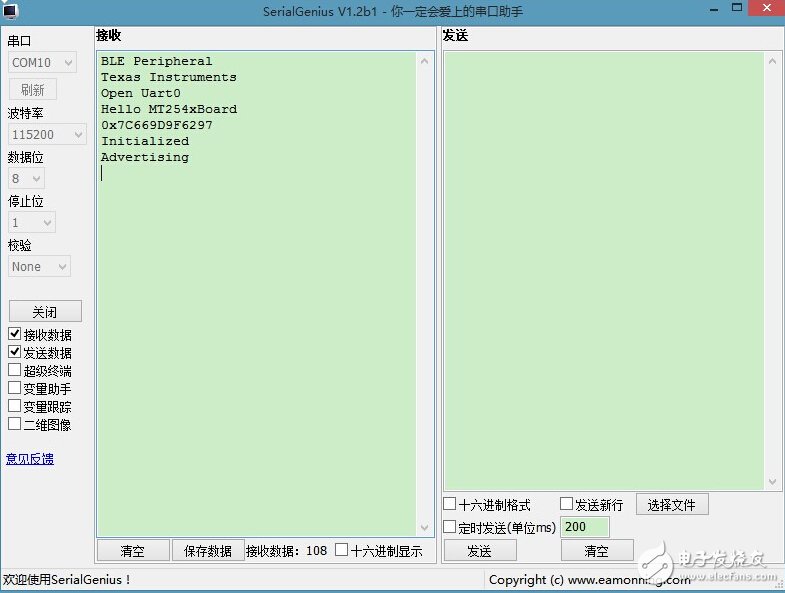
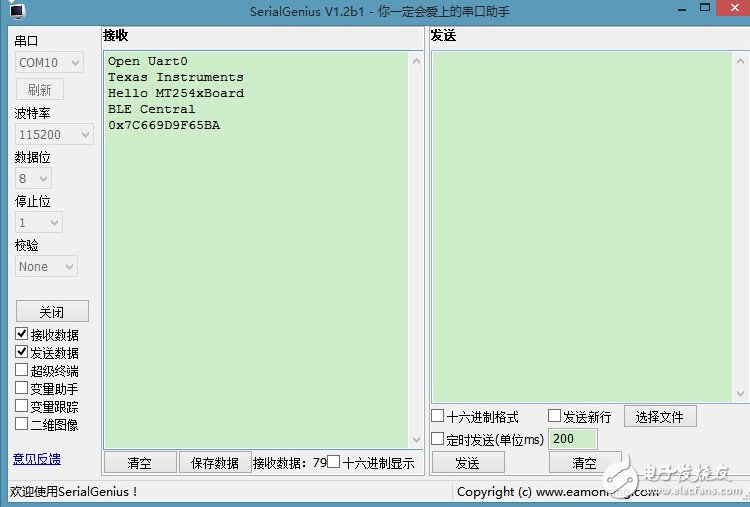
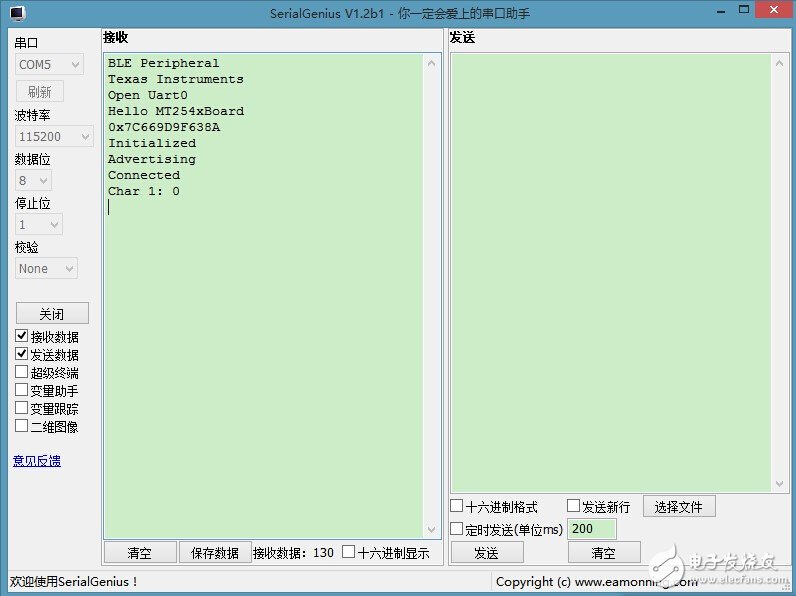
主機上電提示:
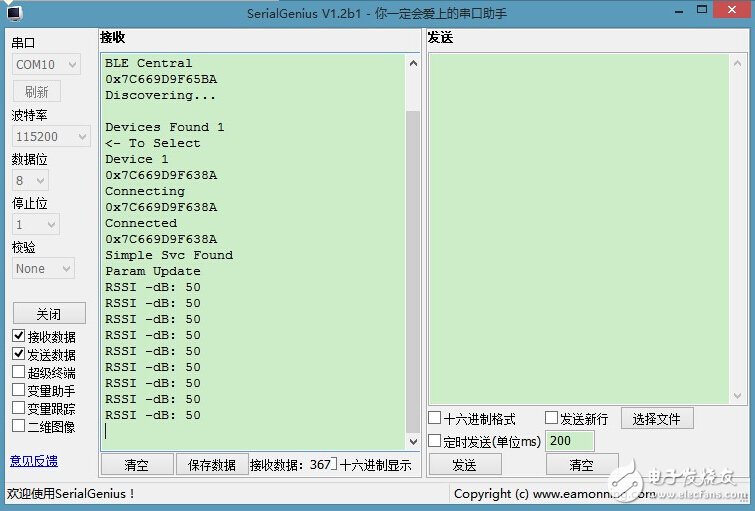
(2)根據主機的按鍵功能,我們按“UP”鍵,開始搜索周邊設備。搜索完成后,可以看到,掃描到了一個設備。
(3)接著我們查看掃描到的設備地址,按左鍵。可以看到掃描到的設備地址為0x7C669D9F638A。這個地址正是我們的從機地址。
(4)按中間鍵連接從機,可以看到主機提示連接成功,從機也提示連接成功。
(5)接著我們開始讀取從機的RSSI值,按下鍵。
(6)再次按下鍵,取消RSSI值的讀取。
(7)對從機的CHAR1進行讀寫,再次按上鍵讀取到CHAR1的值為1。
(8)接著按上鍵,對CHAR1寫入0,同時看到從機提示CHAR1的值被修改為0。
主機寫入成功:
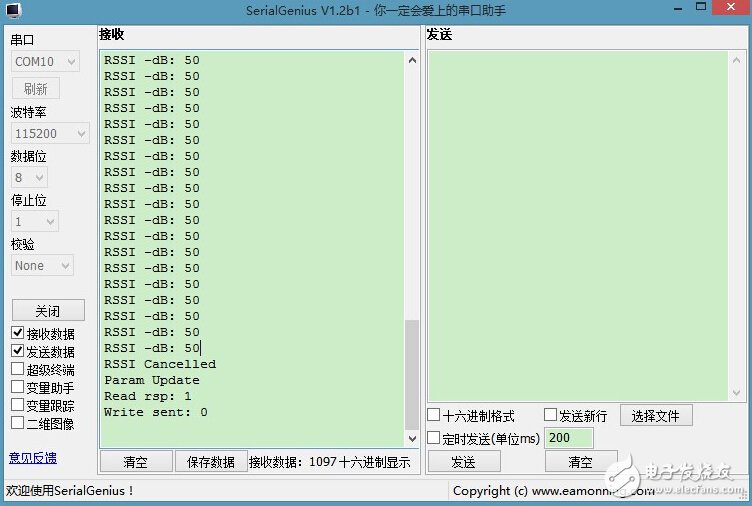
從機提示CHAR1被改變:
上電自動連接
上一節中我們通過五向按鍵實現了主機連接從機的功能,這一節中們來實現主機上電后自動搜索連接從機。
要實現連接,從機必須處于廣播狀態,剩下的工作全部由主機完成,掃描、發起連接。
主機的狀態也有回調函數,主機啟動后,第一個狀態是初始化,所以我們在初始化完成時開始掃描,
這樣開機后主機就會開始掃描周邊設備,接下來我們在掃描完成后對掃描到的設備發起連接。
將工程編譯下載后通過串口助手觀察主機和從機的輸出可以發現主機上電后自動的完成了一系列的操作。











 工商網監
工商網監
評論