推薦幾款電力電子仿真軟件,有沒有安卓端和電腦端的?
2024-03-17 09:43:40
1.54" 電子墨水電子紙 顯示 平臺評估擴展板
2024-03-14 20:37:52
2.13" 電子墨水電子紙 顯示 平臺評估擴展板
2024-03-14 20:37:52
2.7" 電子墨水電子紙 顯示 平臺評估擴展板
2024-03-14 20:37:50
英偉達(NVIDIA)總部位于美國加利福尼亞州的圣荷西市。因此,可以說英偉達是一個美國的品牌。
2024-03-01 16:36:48 2621
2621 我在原理圖上把電子元件放在圖紙上并連好線,然后拖動電子元件的同時連線也跟隨元件一起移動,不知道應(yīng)該用哪款設(shè)計軟件能實現(xiàn)(簡單好上手的軟件),希望大神們告知一下,謝謝!
2024-02-28 16:51:28
宋仕強介紹說,金航標設(shè)在廣西自治區(qū)鹿寨縣的生產(chǎn)基地由金航標電子以前設(shè)在東莞塘廈的工廠逐漸發(fā)展起來的,是“kinghelm”(www.kinghelm.net)品牌北斗GPS天線、高速率信號連接器
2024-02-26 14:08:36
protues添加通過component search engine 下載的電子元件模型后就閃退,流程是通過“庫-Import Parts\",然后就按照提示一直選擇下去,添加從搜索引擎
2024-02-15 13:00:28
。有的時候屏蔽罩也被設(shè)計用來防止電磁干擾。
目前,像TE品牌推出的 D-Subminiature 連接器產(chǎn)品組合適合多種應(yīng)用,帶有專用附件,能夠為任何客戶提供適合任意復(fù)雜應(yīng)用的經(jīng)濟型 D-Sub
2024-01-26 15:53:13
電子生產(chǎn)大多存在工藝多變、物料變更頻繁等情況,這些也使得電子生產(chǎn)管理比較復(fù)雜。如何打通物料計劃、生產(chǎn)計劃、采購計劃、庫存、班組負荷、生產(chǎn)設(shè)備、成本核算等業(yè)務(wù)
2024-01-22 09:42:48
——電子發(fā)燒友,作為行業(yè)領(lǐng)先的電子媒體,致力于為工程師創(chuàng)造價值,為行業(yè)提供高質(zhì)量內(nèi)容,為企業(yè)提供專業(yè)的品牌傳播,深度報道,產(chǎn)業(yè)洞察等服務(wù)。
在過去一年中,華秋-電子發(fā)燒友,憑借其深度的采訪、專業(yè)的報道
2024-01-19 14:55:55
——電子發(fā)燒友,作為行業(yè)領(lǐng)先的電子媒體,致力于為工程師創(chuàng)造價值,為行業(yè)提供高質(zhì)量內(nèi)容,為企業(yè)提供專業(yè)的品牌傳播,深度報道,產(chǎn)業(yè)洞察等服務(wù)。
在過去一年中,華秋-電子發(fā)燒友,憑借其深度的采訪、專業(yè)的報道
2024-01-19 14:53:16
2023年12月29日,由中國電子商會、數(shù)字經(jīng)濟觀察網(wǎng)共同發(fā)起“2023中國電子信息影響力品牌榜”榜單已公布。
2024-01-09 13:36:42250 
該品牌榜活動,長期以來備受關(guān)注,其主題鮮明——以“創(chuàng)新引領(lǐng) 賦能美好電子信息未來”為主導(dǎo)思想,緊緊圍繞二十大精神和國家發(fā)展策展,深度解讀新技術(shù)、新產(chǎn)品、新商業(yè)形式和新業(yè)態(tài)。
2023-12-29 14:14:57190 目前瞻芯電子已發(fā)布量產(chǎn)過百款碳化硅(SiC)功率半導(dǎo)體產(chǎn)品,包括碳化硅(SiC) MOSFET,SBD和SiC模塊產(chǎn)品,電壓平臺涵蓋650V-1700V,而且規(guī)格齊全、封裝多樣。2023年瞻芯電子
2023-12-25 18:42:34559 
在電子工程領(lǐng)域,降壓恒流IC芯片是一種非常重要的電子元器件。它們被廣泛應(yīng)用于各種電子設(shè)備中,如LED照明、電動汽車、電子煙等。其中,OC5220原廠降壓恒流IC芯片是一款非常優(yōu)秀的降壓恒流IC芯片
2023-12-21 19:08:01
炬力藍牙芯片型號較多,因此沒有絕對的答案可以說哪個更好。炬力是一家專業(yè)生產(chǎn)和銷售藍牙芯片的公司,其產(chǎn)品種類繁多,覆蓋了各種不同應(yīng)用場景和需求。本文將為您詳細介紹炬力藍牙芯片的不同型號以及它們的優(yōu)點
2023-12-20 10:48:04502 如下圖,當H+接一個1歐姆發(fā)熱絲短路時,我程序能識別到短路也能關(guān)斷MOS管,但是芯片會低電復(fù)位,有沒有什么解決方法嗎?有做過電子煙的這塊的大佬能不能指點一下啊! (pcb已經(jīng)量產(chǎn),小白在實習(xí),拿著它學(xué)習(xí)程序)
2023-12-20 08:58:17
電子發(fā)燒友網(wǎng)站提供《可替代品牌型號介紹.xlsx》資料免費下載
2023-12-14 10:49:05 6
6 12月7日,2023年(第20屆)中國物聯(lián)網(wǎng)產(chǎn)業(yè)大會暨品牌盛會在杭州濱江開元名都大酒店舉辦。士蘭微電子獲“2023半導(dǎo)體國產(chǎn)卓越品牌”獎。
2023-12-12 09:41:41282 12月7日,由中國安全防范產(chǎn)品行業(yè)協(xié)會、浙江省安全技術(shù)防范行業(yè)協(xié)會指導(dǎo),慧聰物聯(lián)網(wǎng)、慧聰安防網(wǎng)、慧聰電子網(wǎng)聯(lián)合主辦的“2023(第20屆)中國物聯(lián)網(wǎng)產(chǎn)業(yè)大會暨品牌盛會”隆重召開。
2023-12-08 17:41:02419 是通過燃燒煙草產(chǎn)生的煙霧。因此,電子煙的煙霧中不含焦油、一氧化碳和其他許多有害物質(zhì),相對來說能更少地對健康造成危害。并且電子煙通常可以調(diào)整尼古丁的濃度,用戶可以根據(jù)自己的需求選擇低濃度或無尼古丁的煙油。電子煙還有多種味
2023-12-04 15:45:01411 使用了LLaMA-13B來訓(xùn)練模型和獎勵模型,使用BAD模型作為有害內(nèi)容檢測模型。
2023-12-04 13:57:12142 
電子發(fā)燒友網(wǎng)站提供《直流和交流,哪個好處值得關(guān)注.doc》資料免費下載
2023-11-14 10:20:250 在畜牧業(yè)中,RFID電子耳標讀卡器是一個非常重要的設(shè)備,它可以幫助養(yǎng)殖戶追蹤和管理動物,進行牲畜的身份識別、盤點計數(shù)、自動飼喂、防疫分欄管理、出入欄管理、智能稱重等操作,提高生產(chǎn)效率和減少損失。近年來,隨著國外品牌和國內(nèi)品牌的不斷涌現(xiàn),選擇一個合適的電子耳標讀卡器品牌成為了許多養(yǎng)殖戶的難題。
2023-11-09 09:39:18289 硬件設(shè)計中,除了設(shè)計原理圖與PCB板圖,電子元器件的選型也是十分重要的。 對于電子元器件的選型,大多是在企業(yè)級的實際生產(chǎn)中會特別要求,包括功能與成本之間的均衡考慮,極端條件的穩(wěn)定性都需要考慮其中
2023-11-07 10:36:05375 富昌電子(Future Electronics),再度獲得中國區(qū)評委與行業(yè)觀眾的認可,獲頒2023年度“優(yōu)秀國際品牌分銷商”大獎。
2023-11-06 10:06:33241
·600KHz 開關(guān)頻率
·輸出過壓,輸出短路保護
·輸入欠壓,輸入過壓保護
·過溫保護
應(yīng)用
·移動電源
·藍牙音箱
·電子煙
·對講機
2023-11-04 14:57:46
·600KHz 開關(guān)頻率
·輸出過壓,輸出短路保護
·輸入欠壓,輸入過壓保護
·過溫保護
應(yīng)用
·移動電源
·藍牙音箱
·電子煙
·對講機
2023-11-04 12:12:49
V90 電機帶網(wǎng)口的電機,哪位大神知道怎么把電機電子名牌數(shù)據(jù)拷貝出來
2023-11-03 07:48:42
從2013年起,越來越多骨傳導(dǎo)耳機品牌如雨后春筍般出現(xiàn),巨大的利潤讓不少品牌涌入,那么現(xiàn)在又有哪些品牌經(jīng)歷過了洗刷,最終存貨下來,并且進入了十大品牌了? 本文對于沒有相關(guān)經(jīng)驗的消費者來說,幫助他們
2023-11-01 16:29:25651 
汽車電子上感覺STM32用的不是很多,感覺NXP瑞薩不少;那汽車電子對單片機有什么比較特殊的要求嗎。
2023-10-30 08:01:06
電子行業(yè)經(jīng)常會遇到物料變更、插單頻繁、工藝變更等情況,而這些無疑會打亂車間的生產(chǎn)計劃,從而影響車間生產(chǎn)效率。此外,每個車間、每道工藝的加工時間和品質(zhì)檢驗流程等各異,如何準確掌握車間產(chǎn)能負荷,制定合理
2023-10-27 10:36:21398 
用什么品牌芯片可以做鼠標?
2023-10-26 07:46:33
一、引言薄膜電子拉力試驗機是一種用于測試薄膜材料力學(xué)性能的實驗設(shè)備,廣泛應(yīng)用于材料科學(xué)、物理、化學(xué)等領(lǐng)域。該設(shè)備能夠準確地測量薄膜材料的拉伸強度、屈服強度、斷裂強度等指標,從而評估材料的質(zhì)量和可靠性
2023-10-25 16:03:00
在眾多的焊錫絲品牌中,不同的品牌有自己的特點和優(yōu)勢。很難說哪個品牌的焊絲最好。但是,從一些基本因素來看,我們可以找到一些選擇焊錫絲的指導(dǎo)原則。下面焊錫絲廠家向大家介紹一下:首先是選擇材質(zhì)。焊錫絲
2023-10-19 17:03:441327 
汽車電子對元件的工作溫度要求比較寬,根據(jù)不同的安裝位置等有不同的需求,但一般都要高于民用產(chǎn)品的要求(據(jù)說 AEC Q100 在 H 版中刪除了 0℃-70℃ 這檔溫度的要求,因為沒有哪個汽車產(chǎn)品要求可以這么低)。
2023-10-19 12:34:27149 
電子墨水屏的結(jié)構(gòu)是什么
2023-10-18 07:16:25
電子開關(guān)觸發(fā)流程如下:電子開關(guān)初始狀態(tài)懸空,外部輸入5V電壓的時候,使能電子開關(guān)拉到地2s,2s后恢復(fù)原狀態(tài)(懸空),請問是否有滿足這樣要求的電路或者元件,請指教。
2023-10-16 16:09:47
請問:
RFID射頻電子標簽埋在地下1.5深以內(nèi),地上能夠有效探測嗎?
2023-10-10 16:17:30
各位老師,最近要把生產(chǎn)現(xiàn)場一個老舊產(chǎn)線進行更新,上面有用到丹佛的電子天平 TP-602型號,之前是國外工程師用Labview寫的程序,生成了exe文件在上面使用,但沒有源代碼了,所以只能重新來寫代碼
2023-09-08 14:00:17
(123,56)和(56,123)寫入電子表格時顯示的結(jié)果卻不一樣,有哪位大佬知道是什么原因嗎?
2023-09-06 16:05:31
CLM32L003應(yīng)用:小家電、充電器、遙控器、電子煙、燃氣報警器、數(shù)顯表、溫控器、記錄儀、電機驅(qū)動、智能門鎖、迷你手電筒 ,手持電風(fēng)扇。詳細內(nèi)容請查看規(guī)格書。
2023-09-05 10:38:21
數(shù)字示波器和模擬示波器哪個好? 隨著現(xiàn)代電子技術(shù)的不斷發(fā)展與進步,數(shù)字示波器和模擬示波器已成為測量電子信號時最為常用的儀器之一。二者分別采用數(shù)字或模擬信號采集的方式來測量電子信號,各有其特點和優(yōu)缺點
2023-09-04 16:52:002964 便攜式有毒有害氣體分析儀是一種專門用于檢測和分析各種有毒有害氣體的設(shè)備,它具有體積小、重量輕、方便攜帶等特點,可應(yīng)用于多種場合。下面,我們將詳細介紹便攜式有毒有害氣體分析儀的基本知識
2023-09-04 14:40:27403 自由電子和電子一樣嗎 自由電子怎么移動 自由電子和電子并不完全相同,雖然它們都是負電荷,但是它們的基本特性是有所區(qū)別的。 首先,電子是一種基本粒子,是帶電的粒子,是構(gòu)成原子的基本構(gòu)成要素。在一個原子
2023-09-01 11:08:532820 什么是自由電子 自由電子是如何形成的? 自由電子是某些物體中不附著于任何原子內(nèi),能夠在自由空間中自由運動的電子。這些電子由于它們的自由狀態(tài),可以在材料中參與各種電子性質(zhì),如電導(dǎo)性質(zhì)和熱導(dǎo)性質(zhì)
2023-09-01 11:08:503391 作為全球領(lǐng)先的磁性元件技術(shù)供應(yīng)商,電子產(chǎn)業(yè)鏈基礎(chǔ)元器件領(lǐng)域重要的國產(chǎn)品牌,科達嘉電子攜大電流電感、車規(guī)級一體成型電感等16大電感產(chǎn)品系列精彩亮相Elexcon2023深圳國際電子展嵌入式系統(tǒng)展區(qū),聚焦工業(yè)電源、新能源儲能、汽車電子等領(lǐng)域,與電子產(chǎn)業(yè)界朋友共同探討行業(yè)技術(shù)應(yīng)用、產(chǎn)業(yè)動態(tài)及發(fā)展趨勢。
2023-08-24 17:56:05583 
8月23日,Elexcon2023深圳國際電子展正式開幕,近600家全球優(yōu)質(zhì)品牌廠商齊聚深圳會展中心(福田),并有上萬名觀眾來到現(xiàn)場參觀、交流。飛凌嵌入式攜多款多類型的智能主控產(chǎn)品及熱門行業(yè)解決方案
2023-08-24 15:37:40
有毒有害氣體檢測儀是一種重要的安全設(shè)備,廣泛應(yīng)用于各類工業(yè)生產(chǎn)環(huán)境。這些設(shè)備可以檢測和監(jiān)控空氣中的有毒有害氣體濃度,為現(xiàn)場工作人員提供即時和準確的氣體濃度信息,以確保其在安全環(huán)境中工作。 1. 有毒
2023-08-23 15:15:23488 選擇一個優(yōu)質(zhì)的氣密性檢測儀品牌可以確保你獲得精準、可靠的測試結(jié)果。但是,市場上眾多的品牌和產(chǎn)品使選擇變得困難。以下是一些關(guān)鍵的選擇標準,可以幫助你找到適合你需求的氣密性檢測儀品牌。 1. 品牌聲譽
2023-08-18 10:24:19601 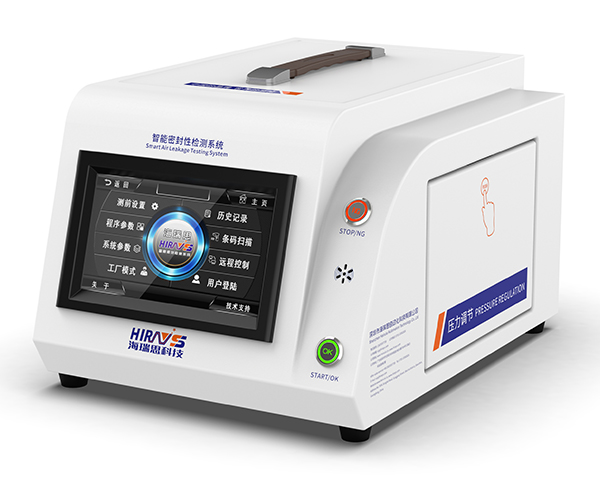
電子看板在電商行業(yè)中可以用于促銷、廣告展示、產(chǎn)品導(dǎo)購、交互式指引、評價展示和實時銷售數(shù)據(jù)展示等多個方面,提升用戶體驗、促進銷售和增強品牌形象。
2023-08-13 16:49:13182 
概述中文電子經(jīng)緯儀是一款紅外電經(jīng),絕對編碼讀數(shù),中文顯示,測角精度2秒,電子氣泡補償精度為1秒,補償范圍:±4’。帶激光對中器。降阻電路優(yōu)化設(shè)計,國際首創(chuàng)CCD作為接收器。本產(chǎn)品結(jié)構(gòu)合理
2023-08-07 11:17:05
互聯(lián)網(wǎng)的高速發(fā)展,隨著5G時代已穩(wěn)步到來,智能汽車的發(fā)展也越發(fā)的迅速。汽車電子對晶振的要求比消費類的科技數(shù)碼產(chǎn)品高的多,特別是耐高溫這一塊,汽車電子中的晶振最好能在高溫和低溫狀態(tài)下正常工作。
2023-07-20 15:08:45762 電子血壓計是最常用的血壓計,尤其是家里有老人的家庭,很多都會在家中常備。但最近,聽到一些老人跟孩子抱怨,說電子血壓計沒以前那么準了。咋回事呢?聽完老人的描述才知道,原來很多不是電子血壓計不準,而是
2023-07-18 17:50:451126 
7月17日,在投資者互動平臺上,聞泰科技(600745.SH)的安氏半導(dǎo)體公司表示,是世界上最好的電力芯片idm的分立及領(lǐng)先生產(chǎn)企業(yè),也是世界上最好的汽車半導(dǎo)體公司之一。公司已經(jīng)全面分布汽車電子事業(yè)。在汽車電動化方面,安世半導(dǎo)體、汽車tier1供應(yīng)商和各大汽車工廠保持著長期而密切的合作關(guān)系。
2023-07-17 11:30:51489 隨著工業(yè)化和城市化的快速發(fā)展,環(huán)境污染問題日益嚴重。有毒有害氣體檢測儀在環(huán)保監(jiān)測領(lǐng)域發(fā)揮著重要作用,為政府和企業(yè)提供了準確、實時的空氣質(zhì)量數(shù)據(jù)。本文將為您介紹有毒有害氣體檢測儀在環(huán)保監(jiān)測領(lǐng)域
2023-07-14 13:59:30230 電子發(fā)燒友網(wǎng)站提供《BIOLIGHT:有害藻華監(jiān)測.zip》資料免費下載
2023-07-13 11:08:020 隨著科技的不斷發(fā)展,智能手表已經(jīng)成為人們生活中不可或缺的一部分。從健康監(jiān)測到智能提醒,再到娛樂休閑,智能手表可以滿足我們的各種需求。那么,在2023年,哪個品牌的智能手表質(zhì)量好呢?本文將為您介紹
2023-07-12 16:34:264532 產(chǎn)業(yè)鏈上下游商業(yè)合作、賦能行業(yè)發(fā)展,NEPCON China 2023上海電子展擁有超4萬平方米的展覽面積,將吸引百余家知名展商,其中不乏國際一線品牌原廠,舉辦10+現(xiàn)場活動,呈現(xiàn)新形勢下電子行業(yè)新動向,為產(chǎn)業(yè)上下游企業(yè)拓展新商機。 200+知名品牌參展 國內(nèi)外品牌齊聚上海
2023-07-12 11:21:16427 在Linux世界中,有許多可靠可用的開源郵件服務(wù)器,這些服務(wù)器都擁有獨特的特點,可用于不同的用途和場景。以下是推薦的5個最好的電子郵件服務(wù)器。
2023-07-12 09:01:022852 國產(chǎn)式電子教室,系統(tǒng)完善,支持目前常用的Windows11系統(tǒng),品牌創(chuàng)立時間之久,堅持教育電子教室多年,全國有多個合作伙伴
2023-07-10 10:58:39549 的使用步驟,同時要定期維護保養(yǎng),為物品的存儲提供安全可靠穩(wěn)定的環(huán)境,達到最好的使用效果。電子干燥柜的工作原理:1、干燥劑干燥柜:利用干燥劑作為除濕劑,適合存儲集成電路、
2023-07-04 13:49:51595 
過去常用的汽車電子電氣架構(gòu)中,各個模塊各司其職地完成各自的任務(wù)。在現(xiàn)階段混合式架構(gòu)中,會有單獨的域控制器。下一步的演進方向是采用中央電子控制單元,即Central ECU,在這種架構(gòu)下,數(shù)據(jù)在哪個階段處理,決策在哪個模塊里實現(xiàn),有多種不同的實現(xiàn)方式,隨之對應(yīng)不同的架構(gòu)。
2023-06-30 16:58:23317 
市場上存在著上千個電力電容器品牌,各品牌間產(chǎn)品的質(zhì)量和性能存在著巨大的差異。那么,電力電容器品牌中有哪些可以靠得住的選擇呢? 1.ABB ABB是一家瑞典公司,是電力電容器領(lǐng)域的龍頭企業(yè)之一。其產(chǎn)品
2023-06-25 15:20:031619 芯驛電子科技(上海)有限公司是一家車載智能產(chǎn)品和FPGA技術(shù)方案公司,是高新技術(shù)企業(yè)、上海市專精特新企業(yè),擁有“AUMO”和“ALINX”兩大品牌,AUMO 品牌專注車載智能產(chǎn)品,提供車載在環(huán)仿真HIL、電子后視鏡CMS產(chǎn)品及方案
2023-06-21 14:38:28437 
禹創(chuàng)半導(dǎo)體榮獲“電子元器件行業(yè)優(yōu)秀國產(chǎn)品牌企業(yè)專家提名獎” 禹創(chuàng)半導(dǎo)體成立于2018年,是國內(nèi)一家致力于集成電路設(shè)計的半導(dǎo)體技術(shù)公司;禹創(chuàng)已取得國內(nèi)數(shù)十項專利,以及通過ISO9001認證,目前集團
2023-06-19 18:31:03747 四月下旬, 2022年度華強電子網(wǎng)優(yōu)質(zhì)供應(yīng)商電子元器件行業(yè)優(yōu)秀國產(chǎn)品牌頒獎盛典在深圳舉行。 華強電子網(wǎng)年度企業(yè)評選活動歷時5個月,從企業(yè)資質(zhì)、知名度、年營業(yè)額、優(yōu)勢、應(yīng)用領(lǐng)域、市場前景及行業(yè)表現(xiàn)
2023-06-08 20:30:02314 
ROHS六項有害物質(zhì)檢測:為環(huán)境與健康筑起的安全屏障 引言: 隨著科技的飛速發(fā)展,電子產(chǎn)品已經(jīng)成為我們?nèi)粘I钪胁豢苫蛉钡囊徊糠帧H欢?b class="flag-6" style="color: red">電子產(chǎn)品的制造與使用過程中往往涉及許多化學(xué)物質(zhì),其中一些可能
2023-06-08 17:48:421008 
提到水浸傳感器,大家都不太陌生。現(xiàn)如今,水浸傳感器已經(jīng)被廣泛應(yīng)用于智能樓宇、數(shù)據(jù)中心、通信機房、庫房、檔案館等所有需要防止泄露的場所。但提及水浸傳感器哪個品牌好,很多朋友都往往說不出一二。其實,要看
2023-06-07 17:04:08443 
\\ESP32 的 IDE?Arduino、帶有 TDM-GCC 和 MinGW 的 Eclipce、PlatformIO,還有其他東西……
相同的脈沖發(fā)生器:哪個 IDE 和編譯器將提供
- 最大脈沖頻率
2023-06-01 11:02:36
國內(nèi)電子萬能拉力試驗機品牌較多,如上海萬能、科準、華恒、金相、泰立等。這些品牌在國內(nèi)市場的占有率較高,擁有強大的技術(shù)團隊和售后服務(wù)支持。同時,國際品牌如INSTRON、MTS等也在中國市場有一定的份額,具有較高的品質(zhì)和技術(shù)水平。
2023-05-31 11:47:20610 
晶體管和電子管音箱哪個好 電子管音箱與晶體管音箱可以說是兩種把不同的發(fā)聲方式,電子管音箱,或者說真空管音箱通過真空的玻璃管去放大聲音,而晶體管音箱則通過固態(tài)的晶體管電子元件去放大聲音。 電子管音箱
2023-05-30 15:30:471475
· QFN13-FC 3 * 3.5封裝
應(yīng)用范圍:
· 便攜式POS終端
· 藍牙揚聲器
· 電子煙
· Thunderbolt接口
· USB Type-C電源傳輸
2023-05-30 14:54:09
電池供電設(shè)備中,AH53XX穩(wěn)壓芯片能夠有效地將電池輸出的電壓轉(zhuǎn)換為穩(wěn)定的3.3V輸出,使其能夠供電給各種芯片或模塊,實現(xiàn)多種功能。例如,通過將該芯片應(yīng)用于煙-霧傳感器中,可以及時檢測到煙-霧,并發(fā)
2023-05-18 16:01:10
智能電子拉力試驗機是一種重要的材料力學(xué)測試設(shè)備,其品牌選擇、價格、操作規(guī)范等方面都需要用戶認真考慮和掌握。
2023-05-18 14:41:58241 為您解釋錫膏對人體有害嗎?錫膏大體上可分為兩種:有鉛錫膏、無鉛錫膏。有鉛錫膏是由助焊成分和合金成分混合而成的。所占合金成分中錫和鉛是主要成分,錫和鉛是屬于低毒物品,
2023-05-17 16:31:39485 
2023年4月25日,由華強電子網(wǎng)主辦的“2023年半導(dǎo)體產(chǎn)業(yè)發(fā)展趨勢高峰論壇暨2022年度華強電子網(wǎng)優(yōu)質(zhì)供應(yīng)商&電子元器件行業(yè)優(yōu)秀國產(chǎn)品牌頒獎盛典”在深圳南山召開,表彰優(yōu)秀企業(yè),樹立行業(yè)
2023-05-16 09:16:29334 
我編寫了一個 ESP8266 來監(jiān)控我的污水泵。如果水位高,它會向我發(fā)送電子郵件。上周我讀到了 OTA,我想在 ESP 上使用它。從 Arduino ide 運行 BasicOTA 并對 ESP
2023-05-12 07:20:35
取電芯片,支持從手機充電器/車充等電源上取電給產(chǎn)品供電。
2.應(yīng)用
? 小家電、電子煙
? 智能家居、音響
? 卷發(fā)器、無線充電
? 筋膜槍、吸塵器等
3.特性
? 集成 USB PD 快充協(xié)議
2023-05-11 15:40:45
直流交換電路是利用電子開關(guān)器件什么來改變輸出電壓的大小呢?
2023-05-05 18:04:49
相關(guān)的測試規(guī)范,重點測試在這些電源瞬態(tài)下,電子設(shè)備的抗干擾能力,硬件設(shè)計中必須預(yù)留足夠的防護手段以抑制這些電源極端情況的影響。表1列出在汽車電子系統(tǒng)中常見有害的電源瞬態(tài)情況。
2023-05-04 09:42:32794 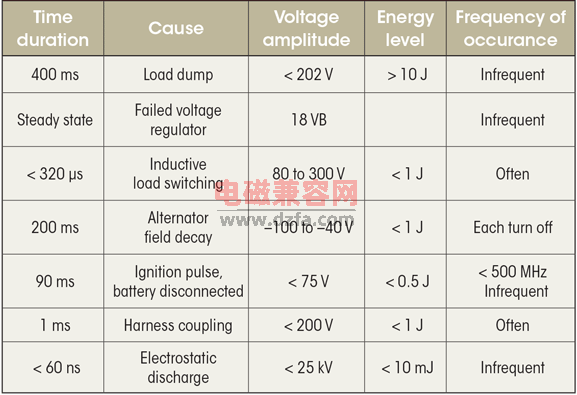
哪位大俠有日產(chǎn)DL250K SCAK電子鐘的電路圖,有元件燒壞了,想查一下,多謝!
2023-04-21 11:10:38
在眾多的焊錫絲品牌中,大家都清楚不同品牌都有著各自的特點和優(yōu)勢,很難說哪個品牌的焊錫絲最好,但是從一些基本因素來看,我們可以找到一些選擇焊錫絲的指導(dǎo)原則,下面焊錫絲廠家向大家介紹一下:首先是選擇材質(zhì)
2023-04-14 16:28:205973 
淺談電子三防漆對PCB板的作用有哪些?
2023-04-14 14:36:27
暨華南電子產(chǎn)品電商選品展于2023年4月12日-14日在廣州保利世貿(mào)博覽館舉行!各大品牌企業(yè)齊聚于此! 據(jù)悉,IEAE廣州電子展立足廣州,輻射全國,致力于為全球供應(yīng)商及買家搭建一站式全品類電子電器產(chǎn)品采購平臺,對參展品牌探索行業(yè)發(fā)展、促進消費
2023-04-14 14:28:041626 4月4日,英飛特電子宣布收購全球光學(xué)解決方案領(lǐng)導(dǎo)者艾邁斯歐司朗歐亞數(shù)字系統(tǒng)相關(guān)業(yè)務(wù),攜手共創(chuàng)美好未來。同時,為提高品牌識別度,樹立良好的品牌形象,英飛特電子更換視覺系統(tǒng),為公司注入全新能量! 01
2023-04-07 09:39:45811 大家來說一說,都有哪些比較知名的品牌,質(zhì)量靠譜的。
2023-03-28 16:34:23
三軸電子羅盤
2023-03-28 15:18:01
大佬們好,分享一下我用魯班貓做ros主控,stm32f407做底層驅(qū)動的一個ros小車。
目的是識別煙霧并凈化:凈化是用的負離子發(fā)生器(效果如文章頂部視頻,凈化還是很頂?shù)模饧由热~將其擴散出去。同時也具有環(huán)境氣體濃度(質(zhì)量)檢測的功能。
b站鏈接:
https://www.bilibili.com/video/BV1hh4y1n7Fz/?vd_source=4fa660ff7e4423139e6ebdbd4dece6c7
這是我去年12月底開始做的,入坑魯班貓算是比較早了。在讀大三學(xué)生。正奧里給考研中。。。
最底下還塞了一塊vet6和一塊esp32.
板子上加了個風(fēng)扇,為了散熱快。
魯班貓1s做ROS主控用于ros建圖(gmapping)和導(dǎo)航,同時接入NPU做抽煙監(jiān)測,模型是yolov5自己訓(xùn)練的模型轉(zhuǎn)化成rknn部署在板子上。
功能部分即功能層的stm32與串口屏、esp32通信部分。功能層的主要目的是獲取傳感器數(shù)據(jù)和通過繼電器控制小車前端的負離子發(fā)生器和兩個加快負離子擴散的風(fēng)扇。這里的stm32相當于一個中轉(zhuǎn),用的是rt—thread實時操作系統(tǒng),版本是4.0.2(寫的比較早,當時的rtt還有小bug,現(xiàn)在已經(jīng)很好用了。)
開啟三個串口:一個用于讀取傳感器,一個用于接收和發(fā)送指令給串口屏,一個用于給esp32傳輸數(shù)據(jù),通過esp32將數(shù)據(jù)發(fā)送到巴法云平臺,做接入小程序中轉(zhuǎn)。
篇幅有限,代碼放在了網(wǎng)盤上。
鏈接:https://pan.baidu.com/s/1ltgypPMq9heezk412r4IKw?pwd=jhzs
提取碼:jhzs
因為用的是rtt,移植性很高,故只寫了應(yīng)用層的main.c函數(shù)。如下:
氣體傳感器如下(所用的是串口協(xié)議)
#include <rtthread.h>
/ *串口1用來調(diào)試* /
#define DBG_TAG \"main\"
#define DBG_LVL DBG_LOG
#include <rtdbg.h>
#include <string.h>
#include <serial.h>//此處有坑,要改頭文件路徑為rt-thread/components/drivers/include/drivers
#include <stdio.h>
#include \"stdlib.h\"
#defineleft_motor_run{rt_pin_write(6,PIN_LOW );rt_pin_write(7,PIN_HIGH);}
#defineleft_motor_back{rt_pin_write(6,PIN_HIGH );rt_pin_write(7,PIN_LOW);}
#definestoping{rt_pin_write(6,PIN_HIGH );rt_pin_write(7,PIN_HIGH);rt_pin_write(16,PIN_HIGH );rt_pin_write(17,PIN_HIGH);}
#defineright_motor_run{rt_pin_write(16,PIN_LOW );rt_pin_write(17,PIN_HIGH);}
#defineright_motor_back{rt_pin_write(16,PIN_HIGH );rt_pin_write(17,PIN_LOW);}
#define key1_openrt_pin_write(51,PIN_LOW );//d3
#define key1_closert_pin_write(51,PIN_HIGH );
#define key2_openrt_pin_write(52,PIN_LOW );//d4
#define key2_closert_pin_write(52,PIN_HIGH );
#define key3_openrt_pin_write(53,PIN_LOW );//d5
#define key3_closert_pin_write(53,PIN_HIGH );
/*micropython esp32與rtt串口DMA傳輸數(shù)據(jù)時有坑,
* 需在drv_usart.c找到HAL_UART_RxCpltCallback和HAL_UART_RxHalfCpltCallback將dma_isr(&uart->serial)注釋掉,
* 能降低數(shù)據(jù)錯誤率*/
/ *串口2的變量 115200* /
struct serial_configureuar2_configs = RT_SERIAL_CONFIG_DEFAULT;
rt_sem_t sem2;
rt_device_t uar2_dev;
rt_thread_t uar_2_th;
rt_thread_t uar_2_deal;
char buffer[128] = {0};
rt_size_t rxlen2 = 0;
/ *串口3的變量 9600* /
struct serial_configureuar3_configs = MY_SERIAL_CONFIG_DEFAULT;
rt_sem_t sem3;
rt_device_t uar3_dev;
rt_thread_t uar_3_th;
uint8_t buffer3[17] = {0};
rt_size_t rxlen3 = 0;
/ *串口4的變量 115200* /
struct serial_configureuar4_configs = RT_SERIAL_CONFIG_DEFAULT;
rt_sem_t sem4;
rt_device_t uar4_dev;
rt_thread_t uar_4_th;
rt_uint8_t buffer4[256] = {0xff};
rt_size_t rxlen4 = 0;
//char deal;
rt_uint8_t deal ;
char wheater[8];
char humidity[4];
char temperature[4];
char wind_speed[4];
char shi[3];
char miao[3];
char fen[3];
char wheater_deal[23]=\"main2.g3.txt=\"\";
char humidity_deal[18]=\"main2.g1.txt=\"\";
char temperature_deal[17]=\"main2.g0.txt=\"\";
char wind_speed_deal[19]=\"main2.g2.txt=\"\";
char shi_deal[15] = \"main.z1.val=\";
char miao_deal[15] = \"main.z0.val=\";
char fen_deal[15] = \"main.z2.val=\";
char end[2]=\"\"\";
char xf_end[3];//串口屏控制幀尾
void uar2_thread_entry(void *parameter)//串口2DMA線程入口
{
rt_size_t len = 0;
/*發(fā)送ch2o數(shù)據(jù)*/
rt_device_write(uar4_dev,0,ch2o_date,sizeof(ch2o_date));
rt_device_write(uar4_dev,0 ,xf_end,sizeof(xf_end));
/*end*/
/*發(fā)送tvoc數(shù)據(jù)*/
rt_device_write(uar4_dev,0 ,tvoc_date,sizeof(tvoc_date));
rt_device_write(uar4_dev,0 ,xf_end,sizeof(xf_end));
/*end*/
/*發(fā)送pm2.5數(shù)據(jù)*/
rt_device_write(uar4_dev,0 ,pm2_5_date,sizeof(pm2_5_date));
rt_device_write(uar4_dev,0 ,xf_end,sizeof(xf_end));
/*end*/
/*發(fā)送pm10數(shù)據(jù)*/
rt_device_write(uar4_dev,0 ,pm10_date,sizeof(pm10_date));
rt_device_write(uar4_dev,0 ,xf_end,sizeof(xf_end));
/*end*/
/*發(fā)送temp數(shù)據(jù)*/rt_device_write(uar4_dev,0,temp_date,sizeof(temp_date));
rt_device_write(uar4_dev,0 ,xf_end,sizeof(xf_end));
/*end*/
/*發(fā)送humi數(shù)據(jù)*/
rt_device_write(uar4_dev,0,humi_date,sizeof(humi_date));
rt_device_write(uar4_dev,0 ,xf_end,sizeof(xf_end));
/*end*/
memset(buffer4, 0, sizeof buffer4);
// }
}
}
rt_err_t uar3_rxback(rt_device_t dev, rt_size_t size)//串口3接收//回調(diào)函數(shù)9600
{
rxlen3 = size;
rt_sem_release(sem3);
return RT_EOK;
}
void uar4_thread_entry(void *parameter)//串口4DMA線程入口
{
rt_size_t len = 0;
while(1)
{
rt_sem_take(sem4, RT_WAITING_FOREVER);
len = rt_device_read(uar4_dev, 0, buffer4, rxlen4);
buffer4[len] = \'\\\\0\';
rt_kprintf(\"%c\\\\n\",len);
if (buffer4[0] == 0x02) {
deal=0x02;
rt_device_write(uar2_dev,0 ,&deal,16);
rt_kprintf(\"uart4\");
deal=0;
}
if (buffer4[0] == 0x01) {
deal=0x01;
rt_device_write(uar2_dev,0 ,&deal,16);
rt_kprintf(\"uart4\");
deal=0;
}
if (buffer4[0] == 0x03) {
deal=0x03;
//memset(buffer,0,sizeof(buffer));
rt_device_write(uar2_dev,0 ,&deal,16);
rt_kprintf(\"uart4\");
deal=0;
}
switch(buffer4[0])
{
case 0x44: key1_open;break;
case 0x55: key1_close;break;
case 0x66: key2_open;break;
case 0x77: key2_close;break;
case 0x88: key3_open;break;
case 0x99: key3_close;break;
}
}
}
rt_err_t uar4_rxback(rt_device_t dev, rt_size_t size)//串口4接收回調(diào)函數(shù)
{
rxlen4 = size;
rt_sem_release(sem4);
return RT_EOK;
}
void clearmachine_and_motor_pin_init()
{
rt_pin_mode(6,PIN_MODE_OUTPUT );//a6
rt_pin_mode(7,PIN_MODE_OUTPUT );//a7
rt_pin_mode(16,PIN_MODE_OUTPUT );//b0
rt_pin_mode(17,PIN_MODE_OUTPUT );//b1
rt_pin_mode(28, PIN_MODE_INPUT);//b12 left
rt_pin_mode(29,PIN_MODE_INPUT);//b13right
rt_pin_mode(51,PIN_MODE_OUTPUT );//d3
rt_pin_mode(52,PIN_MODE_OUTPUT );//d4
rt_pin_mode(53,PIN_MODE_OUTPUT );//d5
key1_close;
key2_close;
key3_close;
}
int main(void)
{
clearmachine_and_motor_pin_init();//引腳初始化
/*串口2 DMA初始化*/
uar2_dev = rt_device_find(\"uart2\");
if (uar2_dev == NULL) {
LOG_E(\"rt_device_find[uart2] FAILED...\\\\\\\\\\\\\\\\n\");
return -EINVAL;
}
rt_device_open(uar2_dev, RT_DEVICE_OFLAG_RDWR | RT_DEVICE_FLAG_DMA_RX);
rt_device_control(uar2_dev, RT_DEVICE_CTRL_CONFIG, (void *)&uar2_configs);
rt_device_set_rx_indicate(uar2_dev, uar2_rxback);
uar_2_th = rt_thread_create(\"uar2_rx_thread\", uar2_thread_entry, NULL, 4096, 10, 5);
rt_thread_startup(uar_2_th);
sem2 = rt_sem_create(\"sem2\", 1, RT_IPC_FLAG_FIFO);
if(sem2 == RT_NULL){
LOG_E(\"sem2 rt_sem_create failed...\\\\\\\\\\\\\\\\n\");
return -ENOMEM;
}
LOG_D(\"sem2 rt_sem_create successed...\\\\\\\\\\\\\\\\n\");
/*串口2 DMA初始化結(jié)束*/
//uar_2_deal = rt_thread_create(\"uar2_deal\", uar2_deal_entry, NULL, 512, 13, 5);
//rt_thread_startup(uar_2_deal);
/*串口3 DMA初始化9600*/
uar3_dev = rt_device_find(\"uart3\");
if (uar3_dev == NULL) {
LOG_E(\"rt_device_find[uart3] FAILED...\\\\\\\\\\\\\\\\n\");
return -EINVAL;
}
rt_device_open(uar3_dev, RT_DEVICE_OFLAG_RDWR | RT_DEVICE_FLAG_DMA_RX);
rt_device_control(uar3_dev, RT_DEVICE_CTRL_CONFIG, (void *)&uar3_configs);
rt_device_set_rx_indicate(uar3_dev, uar3_rxback);
uar_3_th = rt_thread_create(\"uar3_rx_thread\", uar3_thread_entry, NULL, 4096, 12, 5);
rt_thread_startup(uar_3_th);
sem3 = rt_sem_create(\"sem3\", 1, RT_IPC_FLAG_FIFO);
if(sem3 == RT_NULL){
LOG_E(\"sem3 rt_sem_create failed...\\\\\\\\\\\\\\\\n\");
return -ENOMEM;
}
LOG_D(\"sem3 rt_sem_create successed...\\\\\\\\\\\\\\\\n\");
/*串口3 DMA初始化結(jié)束*/
/*串口4 DMA初始化*/
uar4_dev = rt_device_find(\"uart4\");
if (uar4_dev == NULL) {
LOG_E(\"rt_device_find[uart4] FAILED...\\\\\\\\\\\\\\\\n\");
return -EINVAL;
}
rt_device_open(uar4_dev, RT_DEVICE_OFLAG_RDWR | RT_DEVICE_FLAG_DMA_RX);
rt_device_control(uar4_dev, RT_DEVICE_CTRL_CONFIG, (void *)&uar4_configs);
rt_device_set_rx_indicate(uar4_dev, uar4_rxback);
uar_4_th = rt_thread_create(\"uar4_rx_thread\", uar4_thread_entry, NULL, 4096, 11, 5);
rt_thread_startup(uar_4_th);
sem4 = rt_sem_create(\"sem4\", 4, RT_IPC_FLAG_FIFO);
if(sem4 == RT_NULL){
LOG_E(\"sem4 rt_sem_create failed...\\\\\\\\\\\\\\\\n\");
return -ENOMEM;
}
LOG_D(\"sem4 rt_sem_create successed...\\\\\\\\\\\\\\\\n\");
/*串口4 DMA初始化結(jié)束*/
return RT_EOK;
}
最后是串口屏顯示,同時數(shù)據(jù)也能在微信小程序上查看
接下來是魯班貓1s做ros主控的部分。
1、移植輪趣大佬的ros源碼:
根據(jù)我現(xiàn)有的硬件:思嵐a1雷達、一個usb rgb攝像頭選擇合適的功能包,然后開始移植。
中途會出現(xiàn)很多錯誤。例如缺少部分功能包,sudo apt install ros-noetic-(包名)【我的ros版本是noetic】。
2、移植完畢后發(fā)現(xiàn)大佬們并沒有使用魯班貓上的npu。所以我嘗試了用npu跑yolov5在debain10的環(huán)境下用python接口效果如下:
Python與c++接口將圖片監(jiān)測改成實時攝像頭的代碼:
只需更改cv.Capture()函數(shù)的攝像頭設(shè)備號即可。
鏈接:https://pan.baidu.com/s/1gauOezF-X8ZuvU4b0I4v4A?pwd=jhzs
提取碼:jhzs
Python接口的yolov7只需更改yolov5代碼的錨點即可
以下只列出主函數(shù)部分,完整的在鏈接里。
import urllib
import time
import sys
import numpy as np
import cv2
from rknnlite.api import RKNNLite
#from PIL import Image
RKNN_MODEL = \'mask.rknn\'
IMG_PATH = \'./test.jpg\'
OBJ_THRESH = 0.25
NMS_THRESH = 0.45
IMG_SIZE = 640
......(省略中間部分)
if __name__ == \'__main__\':
# Create RKNN object
rknn = RKNNLite()
# init runtime environment
print(\'--> Load RKNN model\')
ret = rknn.load_rknn(RKNN_MODEL)
#ret = rknn.init_runtime(target=\'rv1126\', device_id=\'256fca8144d3b5af\')
if ret != 0:
print(\'Load RKNN model failed\')
exit(ret)
print(\'done\')
ret = rknn.init_runtime()
if ret != 0:
print(\'Init runtime environment failed!\')
exit(ret)
print(\'done\')
capture = cv2.VideoCapture(9)
ref, frame = capture.read()
if not ref:
raise ValueError(\"error reading\")
fps = 0.0
while(True):
t1 = time.time()
#
ref, frame = capture.read()
if not ref:
break
# BGRtoRGB
frame = cv2.cvtColor(frame,cv2.COLOR_BGR2RGB)
#############
img = frame
img, ratio, (dw, dh) = letterbox(img, new_shape=(IMG_SIZE, IMG_SIZE))
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# Inference
print(\'--> Running model\')
outputs = rknn.inference(inputs=[img])
input0_data = outputs[0]
input1_data = outputs[1]
input2_data = outputs[2]
input0_data = input0_data.reshape([3, -1]+list(input0_data.shape[-2:]))
input1_data = input1_data.reshape([3, -1]+list(input1_data.shape[-2:]))
input2_data = input2_data.reshape([3, -1]+list(input2_data.shape[-2:]))
input_data = list()
input_data.append(np.transpose(input0_data, (2, 3, 0, 1)))
input_data.append(np.transpose(input1_data, (2, 3, 0, 1)))
input_data.append(np.transpose(input2_data, (2, 3, 0, 1)))
boxes, classes, scores = yolov5_post_process(input_data)
img_1 = cv2.cvtColor(img, cv2.COLOR_RGB2BGR)
#img_1 = img_1[:,:,::-1]
if boxes is not None:
draw(img_1, boxes, scores, classes)
fps= ( fps + (1./(time.time()-t1)) ) / 2
print(\"fps= %.2f\"%(fps))
#img_1 = cv2.putText(frame, \"fps= %.2f\"%(fps), (0, 40), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)
cv2.imshow(\"video\",img_1[:,:,::-1])
c= cv2.waitKey(1) & 0xff
if c==27:
capture.release()
break
print(\"Video Detection Done!\")
capture.release()
cv2.destroyAllWindows()
但這還沒有接到ros中,為此我去翻rknn的github找到了接入ros的方法。
Ros功能包如下:
Launch文件:
Yolov5.launch
<param name=\"model_file\" value=\"yolov5s-640-640.rknn\"/>
<param name=\"display_output\" value=\"$(arg display_output)\"/>
<param name=\"prob_threshold\" value=\"0.35\"/>
<param name=\"chip_type\" value=\"$(arg chip_type)\"/>
<remap from=\"/camera/image_raw\" to=\"$(arg camera_topic)\"/>
Camrea.Launch
<param name=\"video_device\" value=\"/dev/$(arg device)\" />
<param name=\"image_width\" value=\"640\" />
<param name=\"image_height\" value=\"480\" />
<param name=\"framerate\" value=\"30\" />
<param name=\"pixel_format\" value=\"yuyv\" />
<param name=\"camera_frame_id\" value=\"usn_cam\" />
<param name=\"io_method\" value=\"mmap\"/>
<param name=\"camera_name\" value=\"usn_cam\"/>
啟動攝像頭
默認的攝像頭設(shè)備號為video0 魯班貓為video9
1、roslaunch rknn_ros camera.launch
2、roslaunch rknn_ros camera.launch device:=video9(可傳參或者改launch)
3、roslaunch rknn_ros yolov5.launch chip_type:=RK3566
鏈接:
鏈接:https://pan.baidu.com/s/1QhfRjDs1sftAB0Q-TS5dBA?pwd=jhzs
提取碼:jhzs
不出意外改好板子型號和對應(yīng)的video就能用了。
可打開rviz或者rqt_image_view查看。
模型是我自己訓(xùn)練的,鏈接如下:
鏈接:https://pan.baidu.com/s/1FSJyW6kp4cy3-yakTq_Q4g?pwd=jhzs
提取碼:jhzs
YOLOV5配置和使用:
官方的源碼是不建議的:
用這個:
https://gitcode.net/mirrors/airockchip/yolov5?utm_source=csdn_github_accelerator
這是瑞芯微官方推薦的源碼,但是也需要更改。
yolov5-master\\\\models下的yolo.py
找到
def forward(self, x):
函數(shù),更改為:
def forward(self, x):
z = []# inference output
for i in range(self.nl):
if os.getenv(\'RKNN_model_hack\', \'0\') != \'0\':
z.append(torch.sigmoid(self.m[i](x[i])))
continue
x[i] = self.m[i](x[i])# conv
\'\'\'
bs, _, ny, nx = x[i].shape# x(bs,255,20,20) to x(bs,3,20,20,85)
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
if not self.training:# inference
if self.onnx_dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:
self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)
y = x[i].sigmoid()
if self.inplace:
y[..., 0:2] = (y[..., 0:2] * 2 + self.grid[i]) * self.stride[i]# xy
y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i]# wh
else:# for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
xy, wh, conf = y.split((2, 2, self.nc + 1), 4)# y.tensor_split((2, 4, 5), 4)# torch 1.8.0
xy = (xy * 2 + self.grid[i]) * self.stride[i]# xy
wh = (wh * 2) ** 2 * self.anchor_grid[i]# wh
y = torch.cat((xy, wh, conf), 4)
z.append(y.view(bs, -1, self.no))
if os.getenv(\'RKNN_model_hack\', \'0\') != \'0\':
return z
return x if self.training else (torch.cat(z, 1),) if self.export else (torch.cat(z, 1), x)
\'\'\'
return x[0],x[1],x[2]
這樣就可以在pt權(quán)重轉(zhuǎn)onnx時去掉最后一個Detect層。
pt轉(zhuǎn)onnx指令
python export.py --weights yolov5s.pt --img 640 --batch 1 --opset 11 --include onnx
紅色字體部分換成要轉(zhuǎn)換的權(quán)重文件例如我的就是:
**python export.py --weights ** **weights/best.pt ** --img 640 --batch 1 --opset 11 --include onnx
opset選擇11。
這樣出來的模型是有三個節(jié)點的模型,才是可用的。
可用netron查看:
netron:https://netron.app/(瀏覽器網(wǎng)址)
將模型拖到頁面可查看。
有三個輸出節(jié)點。
且要記好三個節(jié)點的名字。
在官方要求的ubuntu pc端上進行模型轉(zhuǎn)換。
我這里有個改好的yolov5源碼(里面是我訓(xùn)練的抽煙監(jiān)測模型)
網(wǎng)盤鏈接如下:
鏈接:https://pan.baidu.com/s/1fXKNoXhu4m1SmTr4fc-afg?pwd=jhzs
提取碼:jhzs
Chatgpt部分是b站機器人阿杰github開源項目。
https://www.bilibili.com/video/BV12M4y1R76M/?spm_id_from=333.788
效果如圖:
嗚。。。不要看問得什么
整車的sw模型鏈接:soildwork2020及以上版本可直接打開
鏈接:https://pan.baidu.com/s/1KqB1SOD418dCvyDaZFMgpg?pwd=jhzs
提取碼:jhzs當時還理想化的擼了個履帶,可后來發(fā)現(xiàn)打印出來根本用不了,故放棄,換成了輪子。
放鏈接是希望能夠幫到像我一樣步步踩坑的菜鳥級選手。我是老踩坑怪了。
有不當?shù)牡胤剑€望大佬們海涵。
2023-03-24 20:05:14
,大數(shù)據(jù)應(yīng)用的高速發(fā)展,也加速了對于CPU、GPU、DSP、存儲等芯片的國產(chǎn)替代進程。作為“電子行業(yè)一站式采購平臺”,華秋商城為客戶提供圍繞“品牌選型+現(xiàn)貨采購+海外代購+BOM配單”的全流程服務(wù),并且
2023-03-24 16:00:45
的品牌文化,依靠強有力的品牌形象去爭取市場,贏得更多的優(yōu)質(zhì)客戶。 深圳市金航標電子有限公司的技術(shù)骨干和研發(fā)團隊,來自北京清華大學(xué)和電子科大,吸納海歸高端的射頻微波專業(yè)人才,可以研制高可靠、高性能天線
2023-03-24 09:23:37
 電子發(fā)燒友App
電子發(fā)燒友App












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論