如何通過電機的霍爾傳感器讀取位置實現位置環控制
2024-03-19 08:04:46
是絕對定位,另一種是相對定位。本文將詳細介紹伺服電機的絕對定位和相對定位方法,并探討其適用場景和特點。 ? ? ??絕對定位 ? ? ??絕對定位是指在伺服電機初始化之前,電機控制器需要準確地知道電機的當前位置,這樣才能通過控
2024-03-18 08:39:44 23
23 
參數,測定參數電機標稱值相似,驅動板應該是正常的
速度傳感器配置為正交增量編碼器,1000線,啟用Z信號啟動后電機可以正常對齊并旋轉一圈到達Z信號位置
電機為空載運行,調整PID參數后原地不會抖動,運行
2024-03-07 07:31:26
如何通過電機的霍爾傳感器讀取位置實現位置環控制
2024-03-06 07:18:29
速時間:在設置變頻器之前,需要確定電機的起始頻率和加速時間。起始頻率是指電機啟動時的初始頻率值,一般為低頻。加速時間是指從起始頻率到額定頻率所需的時間,通常以秒為單位。 ? ? ??2. 設置額定頻率:額定頻率是電機設計時的運行頻率,也是
2024-02-18 18:26:181237 
三相全波無刷電機(BLDC)的位置檢測是其運行控制中至關重要的環節。位置檢測確保電機的電子換向系統能夠準確地控制定子繞組的通電順序,從而產生正確的旋轉磁場以驅動轉子旋轉。在無刷電機中,這一功能通常
2024-02-05 17:58:34902 
電機的定位方式有兩種,一種是絕對定位,另一種是相對定位。本文將詳細介紹伺服電機的絕對定位和相對定位方法,并探討其適用場景和特點。 絕對定位是指在伺服電機初始化之前,電機控制器需要準確地知道電機的當前位置,這樣才
2024-02-05 17:39:501070 步進電機驅動器是一種常見的電動驅動裝置,廣泛應用于各種自動化設備中。在使用步進電機驅動器的過程中,正確的參數設置和及時的故障維修是非常重要的。本文將詳細介紹步進電機驅動器的參數設置和常見故障的維修
2024-01-24 11:30:11983 嗨,我正在計算永磁同步電機 TLE9243QK_BASE_BOARD 在旋轉變壓器/變壓器上的初始位置,我有一個問題,如何計算永磁同步電機 TLE9243QK_BASE_BOARD 在旋轉變壓器/變壓器上的初始位置?
2024-01-22 07:04:20
大家好想問一下,tc275里,自己在地圖文件里定義有了新的存檔段,又設置了首地位置,段內對象可寫,4字節對齊。但是在內存分段預警處理之后,設置的全局變量初始值不正確,板子上電后會給出一個隨機值,而不會是自己設定的初始值,這怎么解決了呢,具體附圖
?
2024-01-22 06:40:27
步進電機是一種在控制系統中常見的電機類型,它以步進角度為單位進行旋轉,并且可以精確控制位置和速度。在許多應用領域,如精密儀器、印刷設備和醫療設備中,步進電機都得到廣泛使用。 為了實現對步進電機的精確
2024-01-19 10:50:22500 采用復雜控制系統(例如矢量場定向控制或FOC)的電機驅動器通常使用旋轉變壓器接口來向控制系統提供信號以計算電機轉速、角度和絕對位置
2024-01-17 17:18:241358 
我們先來回顧一下絕對位置編碼的問題。絕對位置編碼通過可學習的 Positional Embedding 來編碼位置信息,這種方案直接對不同的位置隨機初始化一個 postion embedding,然后與 word embedding 相加后輸入模型。
2024-01-16 11:37:12301 
了解8位撥碼開關的結構和工作原理。8位撥碼開關通常由8個開關按鈕組成,每個按鈕都有兩個狀態:開和關。開關按鈕的位置決定了對應的二進制位的數值,從而確定了電機的設置參數。 在設置8位撥碼開關之前,需要先確定電機的運動
2024-01-16 10:29:511044 下表描述了如何為下載設置內存保留而不重新初始化。
2024-01-15 10:42:53182 
步進電機驅動器是一種常用的電機驅動設備,它能夠將電流信號轉換為電機的轉動。參數設置是決定步進電機驅動器性能的重要因素之一。在本文中,我將詳細介紹步進電機驅動器的參數設置,包括驅動器的電流設置、步數分
2024-01-11 16:55:41578 伺服驅動器是現代工業自動化系統中常用的一種執行控制的設備,它能夠通過電信號控制電機的速度和位置。設置伺服驅動器的參數是使用伺服驅動器前必須要進行的一項工作,下面將從硬件安裝和軟件配置兩個方面詳細介紹
2024-01-11 10:51:13796 嗎?
選型的時看資料寫斷電后電機移動2048圈,位置會丟失,如果不斷電電機是不是可以連續不停朝一個方向
旋轉,編碼器也不會溢出?
2、用1200PLC控制V90電機,這種絕對編碼器電機,可以安裝零點開關來回零點嗎?
2024-01-09 07:03:40
你知道如何設置變頻器控制機械設備的電機特性參數嗎?接下來三科變頻器將通過以下內容將為您進行這方面的介紹。
2024-01-07 11:01:54437 在伺服電機系統中,通常會有兩個重要的參考位置,即伺服電機零點和原點。伺服電機零點是指電機的初始位置,也可以理解為初始零位或歸零位置。
2024-01-05 10:27:02576 串口初始化是指在使用串口進行數據通信之前,對串口進行一系列的設置和配置,以確保串口能夠正常工作。串口初始化的內容主要包括以下幾個方面: 串口硬件設置:首先,需要確定要使用的串口是哪一個,通常計算機
2024-01-04 09:39:13274
電路板原理圖如上圖所示,我用ZYNQ通過SPI與DA芯片通信,當我控制DA芯片輸出固定電壓時,音圈電機不轉,但是當DA芯片輸出變化的電壓,例如三角波或者正弦波,音圈電機就會往返轉動,而且看上去轉動
2023-12-27 16:14:33
Allegro是一種廣泛應用于計算機應用程序開發的高級別編程語言,為了提高開發效率和代碼的可讀性,合適的光標設置是至關重要的。 一、光標樣式設置 光標在編程過程中起到臨時位置、選定位置、輸入位置
2023-12-26 13:57:17368 的運動控制。原點設置是伺服系統調試和運行的基礎,它直接影響著電機的定位精度和運動控制的準確性。 在伺服電機系統中,通常會有兩個重要的參考位置,即伺服電機零點和原點。伺服電機零點是指電機的初始位置,也可以理解為初
2023-12-25 13:57:591129 伺服位置誤差大的原因及解決方法 伺服電機是一種精密控制裝置,可以實現高精度、高穩定性的位置控制。然而,伺服電機在使用過程中常常出現定位誤差過大的問題。本文將從機械結構、控制系統、環境因素、測量誤差
2023-12-25 13:57:521840 本文以松下FP1系列PLC和A4系列伺服驅動為例,編制控制伺服電機定長正、反旋轉的PLC程序并設計外圍接線圖,此方案不采用松下的位置控制模塊FPG--PP11122122等,而是用晶體管輸出
2023-12-21 10:08:02621 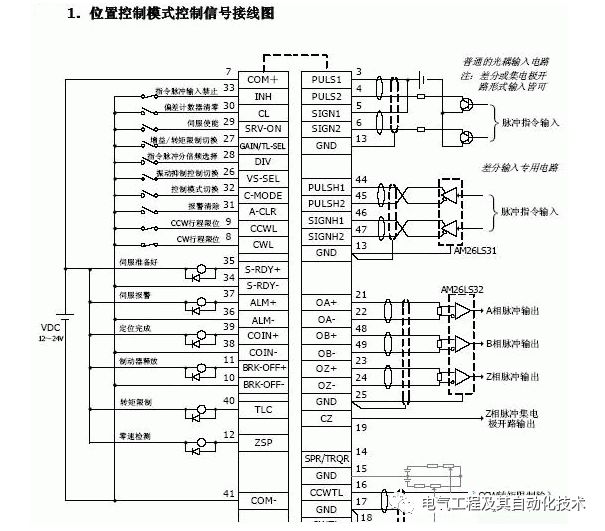
大家好,
AD5933可以從一個設置的初始頻率,按一個遞增量來掃描頻率,這個功能是明確的,我想確認以下幾個問題:
1. 初始頻率是否可以設置為0(即DC直流輸出)?雖然可以設置最低0.1HZ
2023-12-13 06:53:12
ad5220數字電位計上電后初始位置在哪里?
再次上電后,是在初始位置還是上一次斷電時的位置?
2023-12-06 06:11:47
spin-table spin-table啟動流程的示意圖如下: 芯片上電后primary cpu開始執行啟動流程,而secondary cpu則將自身設置為WFE睡眠狀態,并且為內核準備了一塊內存
2023-12-05 15:27:21273 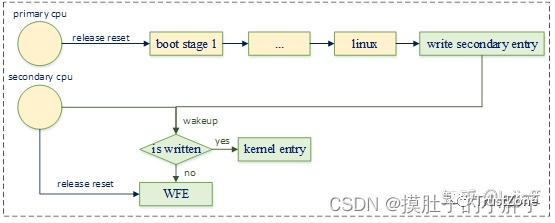
初始分配的堆內存大小。例如,-Xms512m表示將初始堆大小設置為512MB。 -Xmx:設置JVM最大可分配的堆內存大小。例如,-Xmx2g表示將最大堆大小設置為2GB。 -Xmn:設置年輕代的大小
2023-12-05 11:36:05416 低壓配電系統中,浪涌保護器應設置在什么位置才滿足規范的要求? 在低壓配電系統中,浪涌保護器扮演著重要的角色,用于保護電氣設備免受由于瞬態電壓變化引起的浪涌電流的損害。為了滿足規范要求,浪涌保護器應設置
2023-11-22 18:26:071401 (也即沒有外部激勵信號),電路中仍然會存在電荷和電流,從而產生零輸入響應。 零輸入響應是動態電路在初始時刻由于初始條件引起的響應。初始條件包括元件上存儲的能量和位置。這些能量和位置可以是電容器電荷、電感器電流或者電勢
2023-11-21 15:22:32374 電機啟動必須在專家模式下進行。
要激活“專家模式”,必須將DIP開關S10 / 1切換到ON。這是默認設置。該信息也可在MotionStudio中獲得.
2023-11-19 15:33:29853 
要知道變頻器的參數如何設置,首先要明白變頻器是什么東西,用它來做些什么活。變頻器是用來調整異步電機轉速的一種電源裝置,根據轉速n=60f/p(1-s)這個公式,變頻器本質是輸出頻率可調的電壓源,通過
2023-11-13 08:07:231090 
電機是uln2003驅動板//使用arduino IDE自帶的Stepper.h庫文件#include // 這里設置步進電機旋轉一圈是多少步#define STEPS 100//設置步進電機的步數
2023-11-10 08:15:41
上料小車傳動電機(自帶編碼器)帶吸盤實現上料控制,小車軌道設置四個位置實現不同的控制要求。今天更換電機送電后小車無法實現精確定位,請問更換帶編碼器的電機后需要做哪些工作才能實現原來設定位置的精確控制。
哪位大師有編碼器實現位置控制的資料,能不能提供一些作為學習參考!!!謝謝!!!
2023-11-10 07:41:01
Banana Pi BPI-M6(Raspberry Pi 5 替代品)初始設置及固件燒錄
2023-11-09 09:24:54546 
電機轉一圈同步帶轉多少怎么計算
2023-11-07 06:51:25
兩個步進電機用一個定時器發生脈沖,要讓一個轉動一定位置,再讓另一個轉動一定位置,一個電機轉動的不錯,兩個電機,位置就慢慢不對了,是不是有干擾什么的?
2023-10-25 07:17:50
基于步進電機驅動原理,對步進電機驅動方式進行分析,提出了基于西門子S7-1200系列PLC的步進電機位置控制裝置的電氣系統硬件接線及軟件設計。通過測試,該裝置能對位置進行精確控制及狀態監控,在光伏發電追光系統中可用于光伏板的控制,也適用于PLC運動控制教學實訓,在自動化裝置中有較好的推廣價值。
2023-10-23 14:38:162571 
用51單片機控制直流電機轉動圈數,在電位計旋轉至不同位置轉動不同圈數。
2023-10-19 08:07:47
如何實現步進電機的位置反饋
2023-10-15 12:28:05
有什么比較好的辦法可以檢測電機的初始位置
2023-10-15 07:30:19
。在實際應用中,步進電機的運動過程中需要考慮加減速問題,以達到精準的位置控制要求。 一般來說,步進電機的加減速時間需要根據實際情況進行設置。對于不同的應用場景,需要進行不同的設置。在步進電機的控制系統中,加減速時
2023-10-13 17:39:35987 怎么才能實現高精度的步進電機位置控制
2023-10-13 07:40:50
怎么確定步進電機轉動一圈需要的脈沖數
2023-10-12 07:16:00
有什么辦法可以直接獲取電機運動的原點位置
2023-10-12 06:02:22
無刷電機的無感換向是怎么通過反向電動勢來判斷位置的
2023-10-11 07:52:56
電機在運行的時候怎么計數轉動的圈數
2023-10-11 06:23:21
直流電機運動控制的過程中怎么實現高精度的位置控制
2023-10-11 06:23:00
怎么確定一個步進電機控制的初始加速度
2023-10-09 07:28:57
增量式編碼器怎么判斷位置已經轉動了一圈
2023-10-09 07:23:03
每次開機或者連接還有斷開都有一段很長的英語提示音,而且是全音量播放,怎么才能去除這種提示音,就是插耳機插座的藍牙音箱模塊
2023-09-27 07:33:41
? ?1.?最常見的電機位置傳感器有哪些? 用于電機的最先進的位置傳感器被認為是基于旋轉變壓器(resolver-based)和編碼器(encoder-based)的傳感器。 1.1基于旋轉
2023-08-30 09:09:022849 
什么是伺服電機?伺服是一種電磁裝置,利用負反饋機制將電信號轉換為受控運動。基本上,伺服系統的行為類似于執行器,提供對速度、加速度和線性或角度位置的精確控制。它由四件事組成:直流電機、位置傳感器、齒輪
2023-08-30 08:08:521675 (1)在數控機床中,伺服電機位置模式常用于驅動進給軸。通過位置模式,可以實現對切削工具的精確位置控制,以實現高精度的加工操作。 (2)在自動化生產線中,伺服電機位置模式常用于驅動定位裝置、機械
2023-08-15 08:25:01483 在自動化設備中,經常用到伺服電機,特別是位置控制,大部分品牌的伺服電機都有位置控制功能,通過控制器發出脈沖來控制伺服電機運行,脈沖數對應轉的角度,脈沖頻率對應速度(與電子齒輪設定
2023-08-08 08:09:141500 在自動化設備中,經常用到伺服電機,特別是位置控制,大部分品牌的伺服電機都有位置控制功能,通過控制器發出脈沖來控制伺服電機運行,脈沖數對應轉的角度,脈沖頻率對應速度(與電子齒輪設定
2023-08-07 11:11:411620 。
五線:步進電機引出的接線數量為五根。
步進電機工作原理
步進電機是利用電磁鐵原理,將脈沖信號轉換成線位移或角位移的電機。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受
2023-08-03 17:03:41
如何設置音圈馬達的初始位置?作為一家致力于直驅產品研發、生產和銷售的高新技術企業,昆山同茂電子有限公司的主營產品涵蓋音圈馬達、音圈馬達模組、直線電機、直線電機模組四大類。 其中音圈馬達產品占所有
2023-07-28 08:55:11284 旋變,是電機控制中常用的一種位置傳感器,旋轉變壓器的作用就是精準測量電機轉子的位置、轉速及旋轉方向,將這些信號傳輸給電控,由軟件的控制算法來控制電機。
2023-07-20 10:05:224719 
電機位置傳感器零位偏角(即旋變零位偏角或初始角)對電機輸出扭矩的精度至關重要。
2023-07-10 14:49:012906 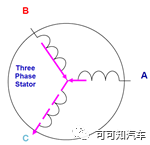
電動車電機在哪個位置位置:電動車電機就是電動車后輪電機側面的邊緣。 電動車電機按照電機的通電形式來分,可分為有刷電機和無刷電機兩大類;按照電機總成的機械結構來分,一般分為“有齒”(電機轉速高,需要
2023-06-26 13:56:583732 介紹CW32L083的RTC初始化設置
2023-06-24 10:16:00914 
外電路的設置,對于初學者來說,主要存在以下幾個方面的困難:(1)初始位置角的確
定;(2)脈寬周期的確定;(3)脈寬的確定;(4)功率器件導通順序的確定。這幾個方面設
置出錯的話,將對仿真結果
2023-06-01 16:55:47 0
0 本篇來介紹電機的位置環控制,實現電機快速準確地轉動到指定位置。回顧上篇,電機速度PID控制的結構圖如下,目標值是設定的速度,通過編碼器獲取電機的轉速作為反饋,實現電機轉速的控制。再來看電機位置PID
2023-05-06 11:50:367 伺服電機是一個閉環系統,它使用位置反饋來控制其運動和最終位置。伺服電機有多種類型,其主要特點是能夠精確控制其軸的位置。在工業型伺服電機中,位置反饋傳感器通常是高精度編碼器,而在較小的 RC 或業余
2023-05-06 10:08:212 可作為各種運動的到位事件觸發器,一般常用于光學檢測應用,開啟此功能后,將實時比較電機當前位置與預先設置的位置,一旦兩者相同,運動控制卡將輸出一個位置比較觸發信號(TRG),將此信號接到相機的輸入端即可讓相機拍照。
2023-05-03 07:41:001383 電機速度PID控制的結構圖如下,目標值是設定的速度,通過編碼器獲取電機的轉速作為反饋,實現電機轉速的控制。
2023-04-25 16:07:322022 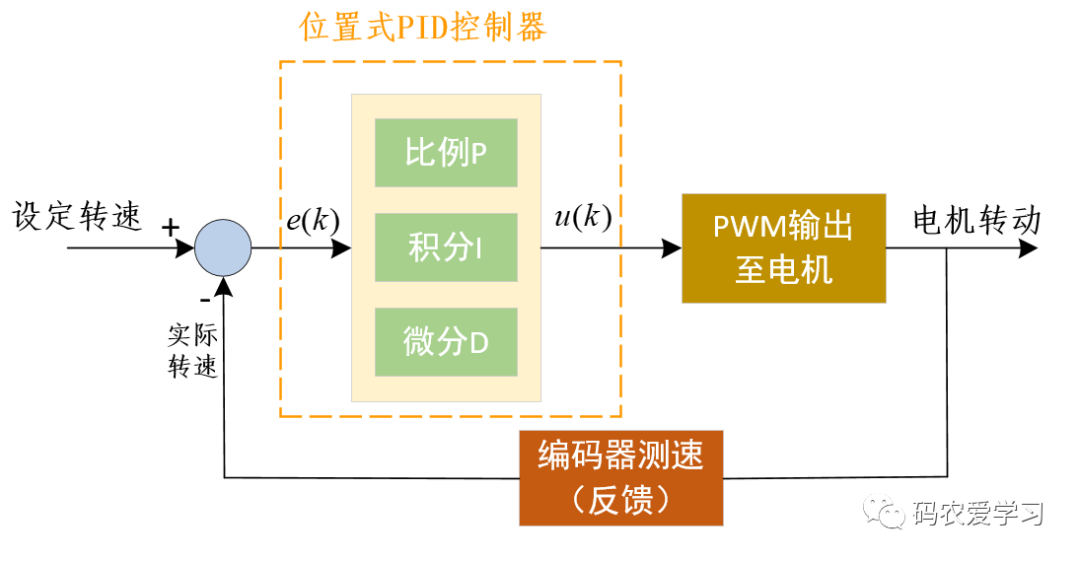
我們知道,獲取磁鐵的位置可以用霍爾傳感器,無刷電機的轉子就是永磁體,因此只要在合適的位置安裝霍爾傳感器,就能知道轉子的旋轉位置。
在無刷電機中,一般用3個開關型霍爾器件就能檢測轉子的位置。霍爾的安裝位置可以相隔120°,也可以相隔60°,我們以下
2023-04-21 11:29:433262 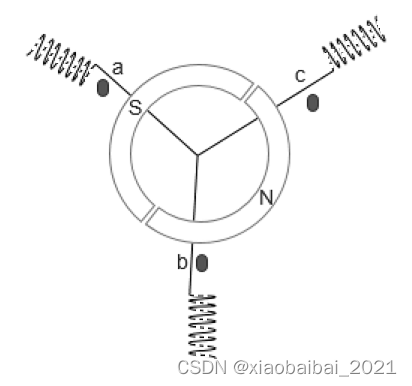
,最大功率可達5KW。集可編程運動控制、PLC、伺服驅動功能于一體。主要應用于直線(DDL)、力矩(DDR)、音圈、有刷、無刷伺服電機的位置、速度、轉矩控制。它能以
2023-04-20 10:21:24
大多數軟啟動器可調初始電壓,由于初始電壓決定初始轉矩,根據負載轉矩設定初始電壓,設置太小,無法啟動或啟動時間過長;設置太高,啟動造成機械沖擊,且啟動電流過大;空載啟動,設置起始電壓為10%-15%額定電壓,中載及重載啟動,可設置起始電壓為額定電壓的40%-70%。
2023-04-18 15:22:1911542 西門子G120變頻器通過IOP-2面板初始設置。OP-2 安裝并通電后會自動檢測它裝入的控制單元和功率模塊的型號。在首次使
用時,IOP-2 會自動顯示選擇默認語言的選項,并允許設置日期和時間
2023-04-07 11:36:0210 為適應大多數工業應用對變頻器進行設置,只需要最基本的設置來操作電機。了解這5個變頻器參數變化,優化變頻器設置,就可以適應大多數電機驅動應用。 學習目標 設置五個參數可以解決大多數變頻器
2023-04-07 11:13:282 電機保護器的脫扣級別設置是根據電動機的額定電流來確定的。脫扣是指保護器在檢測到電機過載或故障后斷開電路的過程。脫扣級別是指電機保護器在斷開電路之前允許電流大小的最大值,設置脫扣級別可以根據電機的額定電流、運行條件、起動方式等來選擇,以保障電機的安全工作和電器設備的正常運行。
2023-03-31 15:11:585306 伺服電機如何讓位置環快速達位而沒有拖尾的現象發生呢?
2023-03-30 17:25:04
Serial.begin()函數初始化串口,設置通信速率為115200。 然后通過encoders[0].init()和encoders[1].init()函數分別初始化了兩個編碼器。 其中,函數init()需要傳入
2023-03-27 16:57:10
步進電機控制器是一種專門用于控制步進電機的設備,可以用來控制步進電機的轉速和方向。步進電機控制器通常包括一個驅動電路板和一個控制板,驅動電路板用于提供電源和輸出脈沖信號,控制板則用于控制步進電機的運行。
步進電機控制器的應用設置一般包括以下幾個方面:
2023-03-26 22:30:201182 隨機訪問不是按數據在文件中的物理位置次序進行讀寫,而是可以對任何位置上的數據進行訪問。
為了對讀寫進行控制,系統為每個文件設置了一個文件讀寫位置標記(簡稱文件位置標記或文件標記),用來指示“接下來要讀寫的下一個字符的位置”。
2023-03-24 15:36:35594 如何用光柵編碼盤實現步進電機的位置控制?我想用光柵編碼盤實現步進電機是否頂到頭即頂不動了!
2023-03-24 10:56:29
勵磁電機在啟動時,初始電動勢會讓勵磁線圈產生磁場,依靠外界電源或是永磁體使電機產生的小電動勢來提供初始,運作后可依靠自身輸出的電壓進行工作;永磁電機是依靠磁體提供初始電動勢,僅需要磁場由永磁體提供即可工作。
2023-03-23 17:27:228972 按鍵控制步進電機正反轉一定設置的角度,比如一圈360度,按一次30度,一起12檔。分兩路控制,4個加減按鍵,一個按鍵控制復位,每路控
制輸出tb6600驅動器驅動兩個42電機同步。同時
2023-03-23 10:05:155
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論