 電子發燒友App
電子發燒友App


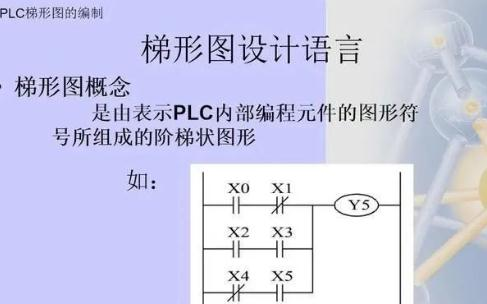
plc梯形圖編程中,用到以下四個基本概念:
01軟繼電器
PLC梯形圖中的某些編程元件沿用了繼電器這一名稱,如輸入繼電器、輸出繼電器、內部輔助繼電器等,但是它們不是真實的物理繼電器,而是一些存儲單元(軟繼電器),每一軟繼電器與PLC存儲器中映像寄存器的一個存儲單元相對應。該存儲單元如果為“1”狀態,則表示梯形圖中對應軟繼電器的線圈“通電”,其常開觸點接通,常閉觸點斷開,稱這種狀態是該軟繼電器的“1”或“ON”狀態。
如果該存儲單元為“0”狀態,對應軟繼電器的線圈和觸點的狀態與上述的相反,稱該軟繼電器為“0”或“OFF”狀態。使用中也常將這些“軟繼電器”稱為編程元件。
02能流
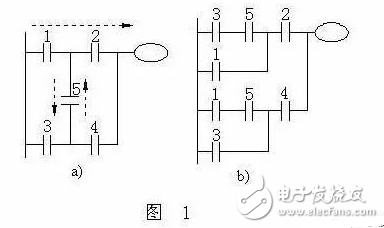
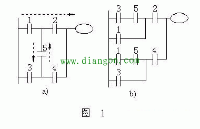
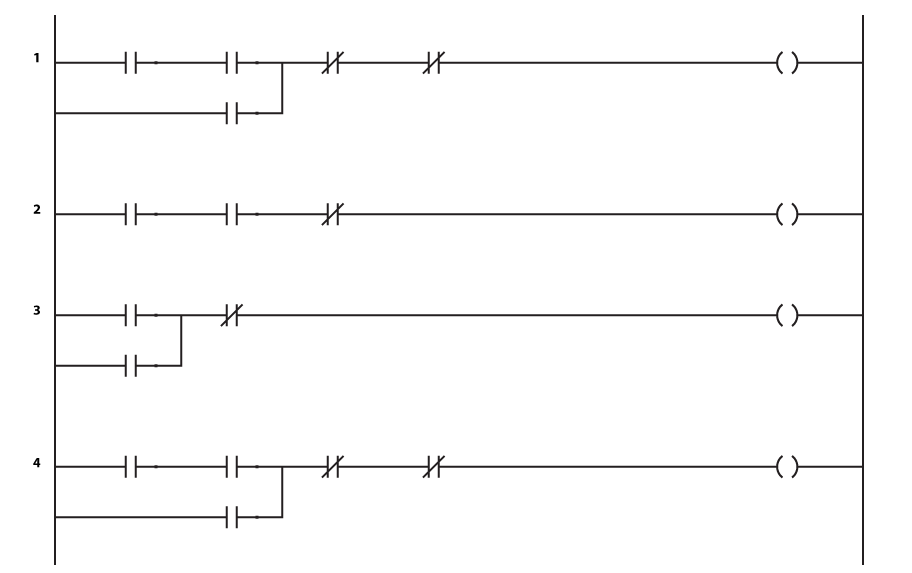
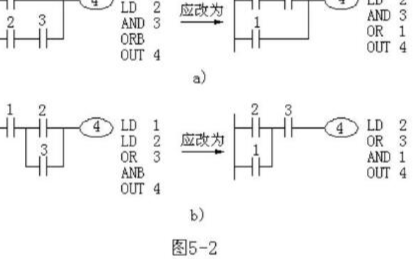
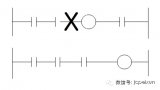
如圖1所示觸點1、2接通時,有一個假想的“概念電流”或“能流”(PowerFlow)從左向右流動,這一方向與執行用戶程序時的邏輯運算的順序是一致的。能流只能從左向右流動。利用能流這一概念,可以幫助我們更好地理解和分析梯形圖。圖1a中可能有兩個方向的能流流過觸點5(經過觸點1、5、4或經過觸點3、5、2),這不符合能流只能從左向右流動的原則,因此應改為如圖1b所示的梯形圖。
03母線
梯形圖兩側的垂直公共線稱為母線(Busbar),。在分析梯形圖的邏輯關系時,為了借用繼電器電路圖的分析方法,可以想象左右兩側母線(左母線和右母線)之間有一個左正右負的直流電源電壓,母線之間有“能流”從左向右流動。右母線可以不畫出。
04梯形圖的邏輯解算
根據梯形圖中各觸點的狀態和邏輯關系,求出與圖中各線圈對應的編程元件的狀態,稱為梯形圖的邏輯解算。
梯形圖中邏輯解算是按從左至右、從上到下的順序進行的。解算的結果,馬上可以被后面的邏輯解算所利用。邏輯解算是根據輸入映像寄存器中的值,而不是根據解算瞬時外部輸入觸點的狀態來進行的。
05梯形圖的組成
①母線:梯形圖的左側豎直線稱為起始母線,右側豎直線稱為終止母線(終止母線可以省略)。母線相當于電路中的電源線,梯形圖從左母線開始,經過觸點和線圈,終止于右母線。
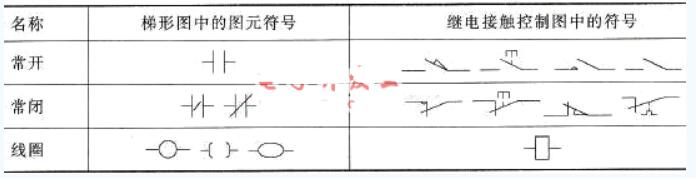
②觸點:梯形圖中的觸點有常開觸點和常閉觸點兩種。這些觸點可以是外部觸點,也可以是內部繼電器的狀態,每一個觸點都有一個標號,同一標號的觸點可以反復使用。觸點放置在梯形圖的左側。
③線圈:梯形圖中的線圈類似于接觸器與繼電器的線圈,代表邏輯輸出的結果,在使用中同一標號的線圈一般只能出現一次。線圈放置在梯形圖的右側。
plc梯形圖編程實例
1.具有自鎖功能的程序
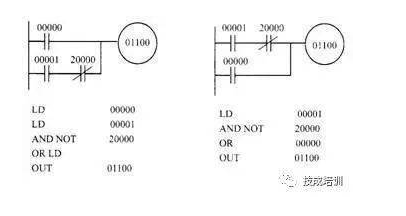
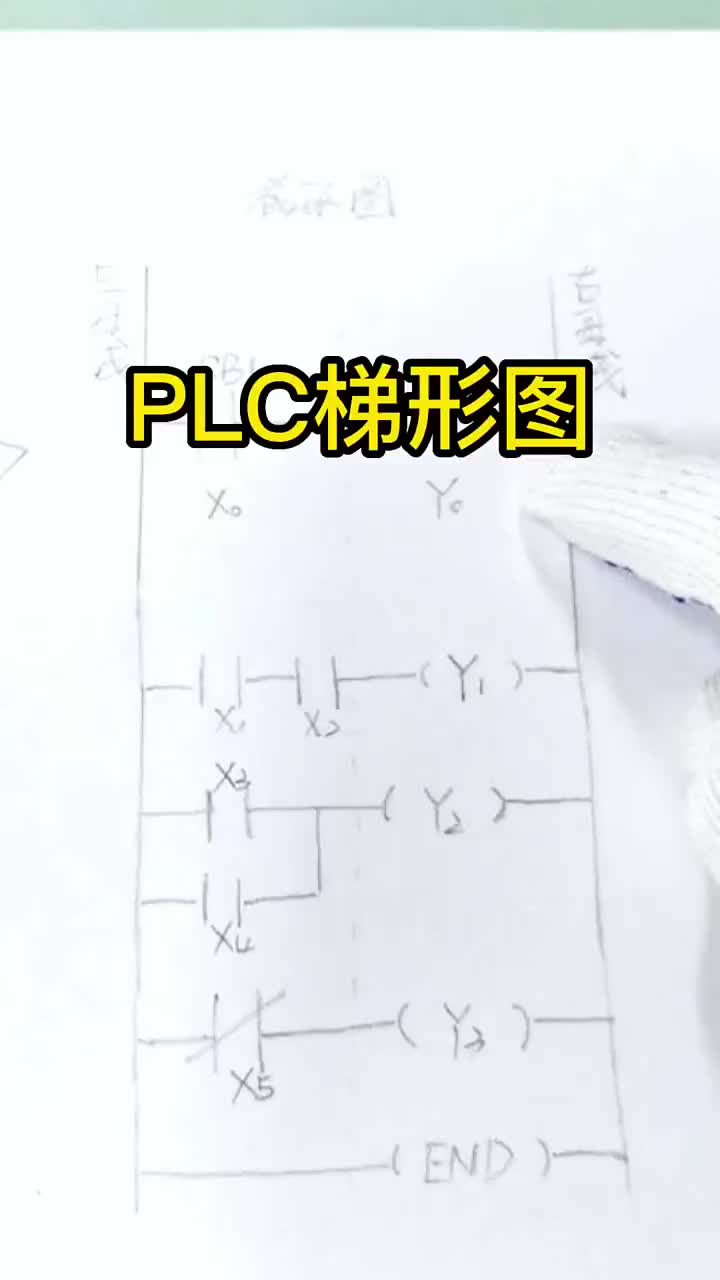
利用自身的常開觸點使線圈持續保持通電即“ON”狀態的功能稱為自鎖。如圖1所示的起動、保持和停止程序(簡稱起保停程序)就是典型的具有自鎖功能的梯形圖,X1為起動信號和X2為停止信號。
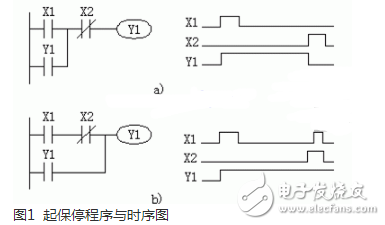
a)停止優先b)起動優先
圖1a為停止優先程序,即當X1和X2同時接通,則Y1斷開。圖1b為起動優先程序,即當X1和X2同時接通,則Y1接通。起保停程序也可以用置位(SET)和復位(RST)指令來實現。在實際應用中,起動信號和停止信號可能由多個觸點組成的串、并聯電路提供。
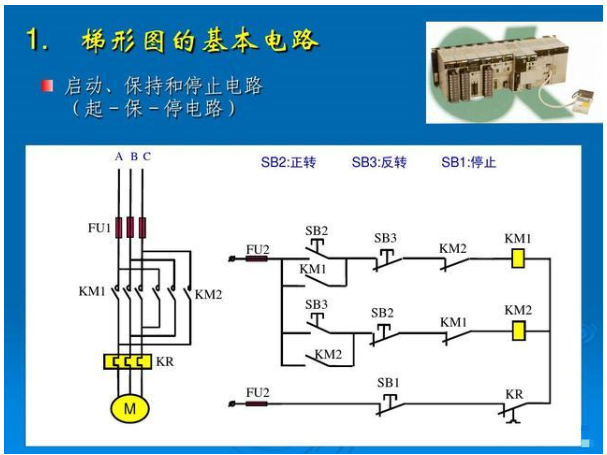
2.具有互鎖功能的程序
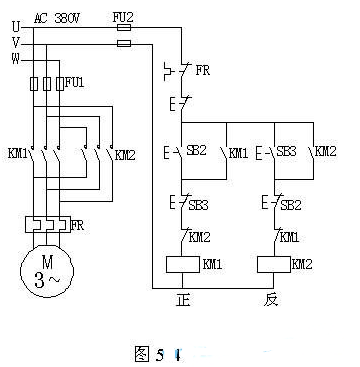
利用兩個或多個常閉觸點來保證線圈不會同時通電的功能成為“互鎖”。三相異步電動機的正反轉控制電路即為典型的互鎖電路,如圖2所示。其中KMl和KM2分別是控制正轉運行和反轉運行的交流接觸器。
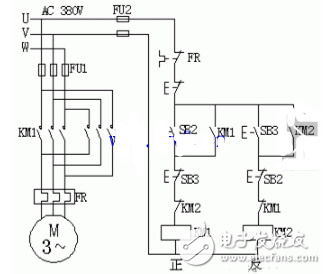
圖2三相異步電動機的正反轉控制電路
如圖3所示為采用plc控制三相異步電動機正反轉的外部I/O接線圖和梯形圖。實現正反轉控制功能的梯形圖是由兩個起保停的梯形圖再加上兩者之間的互鎖觸點構成。
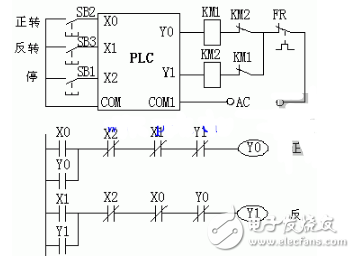
圖3用PLC控制電動機正反轉的I/O接線圖和梯形圖
應該注意的是雖然在梯形圖中已經有了軟繼電器的互鎖觸點(X1與X0、Y1與Y0),但在I/O接線圖的輸出電路中還必須使用KM1、KM2的常閉觸點進行硬件互鎖。因為PLC軟繼電器互鎖只相差一個掃描周期,而外部硬件接觸器觸點的斷開時間往往大于一個掃描周期,來不及響應,且觸點的斷開時間一般較閉合時間長。例如Y0雖然斷開,可能KM1的觸點還未斷開,在沒有外部硬件互鎖的情況下,KM2的觸點可能接通,引起主電路短路,因此必須采用軟硬件雙重互鎖。采用了雙重互鎖,同時也避免因接觸器KM1或KM2的主觸點熔焊引起電動機主電路短路。

















 工商網監
工商網監
評論