三相無(wú)刷電機(jī)驅(qū)動(dòng)器建模與仿真相關(guān)資料下載
2021-07-08 06:20:32
三相直流無(wú)刷電機(jī)是指具有三相的繞組、無(wú)電刷和換向器(或集電環(huán))的電機(jī),并采用直流電經(jīng)過(guò)逆變電路進(jìn)行驅(qū)動(dòng)的電機(jī)。與傳統(tǒng)的 有刷直流電機(jī)相比,直流無(wú)刷電機(jī)采用了電子換向取代有刷電機(jī)的機(jī)構(gòu)換向,取消了電刷
2019-10-30 16:52:19
三相直流無(wú)刷電機(jī)驅(qū)動(dòng)器硬件原理圖分享
2021-06-16 08:47:07
三種較為常見單片機(jī)的驅(qū)動(dòng)方式以及程序
2021-12-21 07:49:47
推薦課程:張飛軟硬開源,基于STM32 BLDC直流無(wú)刷電機(jī)驅(qū)動(dòng)器視頻套件http://t.elecfans.com/topic/42.html?elecfans_trackid=bbs_post
2019-03-12 18:33:54
之前的有刷電機(jī)用的BTN7971B, 現(xiàn)在打算做無(wú)刷電機(jī),使用FOC控制,在網(wǎng)上找到的關(guān)于無(wú)刷電機(jī)驅(qū)動(dòng)的幾乎都是分立MOS搭的驅(qū)動(dòng)橋電路,想問(wèn)一下 ,像BTN7971B能用嗎?有啥區(qū)別
2020-06-01 13:56:28
直流無(wú)刷電機(jī)驅(qū)動(dòng)器比傳統(tǒng)使用變頻器電機(jī)具有功率密度大,轉(zhuǎn)速高,調(diào)速范圍寬,力矩大,效率高等非常多的本質(zhì)的飛躍,從而使直流無(wú)刷電機(jī)系統(tǒng)成為未來(lái)電機(jī)系統(tǒng)的發(fā)展方向,那么無(wú)刷電機(jī)驅(qū)動(dòng)器內(nèi)置的鉗位二極管
2016-05-25 16:56:17
; 5、接受故障信號(hào),當(dāng)故障信號(hào)產(chǎn)生時(shí),無(wú)刷電機(jī)驅(qū)動(dòng)器立即切斷電機(jī)供電,并點(diǎn)亮Hall端口旁的L1故障指示燈,用戶可由此得知驅(qū)動(dòng)器發(fā)生故障,并進(jìn)行處理。
2016-06-03 14:07:36
用戶可通過(guò)控制無(wú)刷電機(jī)驅(qū)動(dòng)器BRK端子控制電機(jī)快速制動(dòng),這種停止方式區(qū)別于ENBL信號(hào),ENBL信號(hào)控制電機(jī)停止時(shí)為自由旋轉(zhuǎn)停止,負(fù)載慣量影響停止時(shí)間;而BRK信號(hào)控制電機(jī)為剎車快速停止,與電機(jī)
2016-06-14 17:48:04
過(guò)流或者電壓過(guò)高的情況。 5、BK剎車控制端子:當(dāng)BK腳與GND腳的斷開時(shí),無(wú)刷電機(jī)驅(qū)動(dòng)器將三根相線短路,電機(jī)處于制動(dòng)狀態(tài)。當(dāng)BK腳與GND腳的接通時(shí),電機(jī)脫離制動(dòng)狀態(tài)。如果電機(jī)處于高速或者負(fù)載
2016-06-16 15:13:21
現(xiàn)在市面上的很多商用數(shù)字電機(jī)驅(qū)動(dòng)器可以通過(guò)通訊或者其他方式接收數(shù)字的調(diào)速信號(hào),但都還保留了模擬調(diào)速接口,比如我手上有一個(gè)elmo的無(wú)刷電機(jī)驅(qū)動(dòng)器,除了可以接收上位機(jī)的調(diào)速信號(hào),還保留了一個(gè)±10V
2019-10-07 17:50:16
運(yùn)轉(zhuǎn),但若高于一定速度時(shí)就無(wú)法啟動(dòng),并伴有尖銳的嘯叫聲;不同廠家的細(xì)分驅(qū)動(dòng)器精度可能差別很大,細(xì)分?jǐn)?shù)越大精度越難控制;并且,步進(jìn)電機(jī)低速轉(zhuǎn)動(dòng)時(shí)有較大的振動(dòng)和噪聲。通常需要步進(jìn)驅(qū)動(dòng)器3.直流無(wú)刷電機(jī)(BLDCM)驅(qū)動(dòng)電流是交流電,一種是方波,一種是正弦波(是交流伺服電機(jī)的一種)4.直流有刷電機(jī)經(jīng)典的.
2021-08-27 07:59:05
目錄一、電機(jī)的三種控制模式1、力矩控制模式2、速度控制模式3、位置控制模式二、硬件說(shuō)明1、硬件清單2、硬件連接三、程序演示1、力矩控制2、速度控制3、角度控制?一、電機(jī)的三種控制模式1、力矩控制模式
2021-09-07 09:20:49
A4945和A4949三相電機(jī)驅(qū)動(dòng)器有哪些優(yōu)點(diǎn)?A4945和A4949三相電機(jī)驅(qū)動(dòng)器有哪些應(yīng)用?
2021-09-22 08:48:28
AN44150A-EVB-0,AN44150三相無(wú)刷電機(jī)驅(qū)動(dòng)器評(píng)估板。 AN44150A是用于三相無(wú)刷電機(jī)的驅(qū)動(dòng)器IC。采用3霍爾傳感器和120度通電驅(qū)動(dòng)系統(tǒng)進(jìn)行轉(zhuǎn)子位置檢測(cè)
2019-06-28 10:32:39
FCC三種認(rèn)證方式主要是針對(duì)不同類別產(chǎn)品。無(wú)線、射頻類產(chǎn)品必須申請(qǐng)F(tuán)CC ID,電腦及電腦周邊產(chǎn)品需申請(qǐng)F(tuán)CC DOC或ID,其它產(chǎn)品一般申請(qǐng)F(tuán)CC VOC即可。三種認(rèn)證方式中級(jí)別ID最高,需TCB
2015-10-22 14:11:47
HAL庫(kù)中UART的三種收發(fā)方式是什么?
2022-02-18 06:33:52
的步進(jìn)電機(jī)以及它的伺服器深圳恒工 86HS156A兩相86MM步進(jìn)電機(jī)軸徑12.7/14/15.875MM 電流6A機(jī)身長(zhǎng)156MM 12NM相關(guān)資料:HSC86A閉環(huán)步進(jìn)驅(qū)動(dòng)器根據(jù)產(chǎn)品簡(jiǎn)介中的介紹,該驅(qū)動(dòng)器可以工作在三種模式:位置、速度、力矩等。但是根據(jù)驅(qū)動(dòng)器上的設(shè)置,問(wèn)題是 三種工作模
2021-06-28 07:51:51
MP6540/MP6540A無(wú)刷電機(jī)驅(qū)動(dòng)器功能框圖分享
2021-06-16 07:12:12
。兩種單極性驅(qū)動(dòng)的接法對(duì)電機(jī)來(lái)說(shuō)都是一樣的,區(qū)別在于驅(qū)動(dòng)內(nèi)部的處理有分別。由于單極性驅(qū)動(dòng)方式的電源利用率相比雙極性驅(qū)動(dòng)方式的要低,很多驅(qū)動(dòng)器已經(jīng)不支持單極性連接。 了解了電機(jī)與驅(qū)動(dòng)器的連接后,我們就要
2023-03-01 10:20:28
如何在不同的下載方式中選擇STM32的啟動(dòng)模式呢?STM32三種BOOT啟動(dòng)方式的設(shè)置與應(yīng)用分別是什么?
2022-01-18 07:01:55
STM32三種啟動(dòng)方式是什么
2021-12-15 07:16:54
本質(zhì)上是一種隨動(dòng)系統(tǒng)。只不過(guò)被控量是位移或是其對(duì)時(shí)間的導(dǎo)數(shù)。如果要問(wèn)什么是隨動(dòng)系統(tǒng),就是一個(gè)系統(tǒng)的輸出盡可能以最快,最精確的方式復(fù)現(xiàn)輸入信號(hào)。其衡量的指標(biāo)有超調(diào)量、延遲。伺服系統(tǒng)有三種控制方式:速度控制
2017-07-05 22:02:40
什么是無(wú)刷電機(jī)?什么是PWM?什么是變頻器?什么是驅(qū)動(dòng)器?
2021-07-21 08:28:10
目前無(wú)刷電機(jī)驅(qū)動(dòng)器的控制電路有專用集成電路、微處理器和數(shù)字信號(hào)處理器等三種組成方式。在對(duì)電機(jī)控制要求不高的場(chǎng)合,專用集成電路組成控制電路是簡(jiǎn)單實(shí)用的方式。那么無(wú)刷電機(jī)驅(qū)動(dòng)器的給定方式有哪些呢
2016-06-15 14:28:21
伺服系統(tǒng)的一部分,那么它主要是用來(lái)起到定位的作用。 伺服電機(jī)驅(qū)動(dòng)器要想很好的控制和定位馬達(dá)呢?主要是通過(guò)以下這三種方式: 1、其位置
2021-06-28 11:19:54
高速脈沖端口。 第三種,只需要給驅(qū)動(dòng)器一路脈沖信號(hào),電機(jī)正反向運(yùn)行由一路方向IO信號(hào)確定。這種控制方式控制更加簡(jiǎn)單,高速脈沖口資源占用也最少。在一般的小型系統(tǒng)中,可以優(yōu)先選用這種方式。 二、伺服電機(jī)
2020-09-29 07:57:38
伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶的要求以及滿足何種運(yùn)動(dòng)功能來(lái)選擇。接下來(lái),給大家介紹伺服電機(jī)的三種控制方式。如果您對(duì)電機(jī)的速度
2018-11-02 09:40:43
一般伺服都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式。大多數(shù)人想知道的就是這三種控制方式具體根據(jù)什么來(lái)選擇的?
2021-01-29 07:28:36
伺服電機(jī)的三種控制方式
2021-01-21 06:45:01
伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶的要求以及滿足何種運(yùn)動(dòng)功能來(lái)選擇。 接下來(lái),給大家介紹伺服電機(jī)的三種控制方式。如果您對(duì)電機(jī)
2020-07-01 07:00:00
伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶的要求以及滿足何種運(yùn)動(dòng)功能來(lái)選擇。接下來(lái),給大家介紹伺服電機(jī)的三種控制方式。如果您對(duì)電機(jī)的速度
2018-11-01 10:59:41
伺服驅(qū)動(dòng)器與伺服電機(jī)怎么連接?如何實(shí)現(xiàn)伺服驅(qū)動(dòng)器的基本控制?
2021-09-28 08:29:01
伺服有哪幾種控制方式?伺服的三種控制方式具體根據(jù)什么來(lái)選擇的?
2021-10-11 08:17:43
有沒有人講解一下三種不同的ADC驅(qū)動(dòng)器架構(gòu):?jiǎn)蔚絾巍味说讲顒?dòng)和差動(dòng)到差動(dòng)?
2021-04-07 06:55:14
關(guān)于無(wú)刷電機(jī)的使用和保養(yǎng):無(wú)刷電機(jī)由電動(dòng)機(jī)主體和驅(qū)動(dòng)器組成,是一種典型的機(jī)電一體化產(chǎn)品,并在多個(gè)領(lǐng)域中都得到廣泛的應(yīng)用。用戶在使用無(wú)刷電機(jī)時(shí)有一些問(wèn)題也是需要注意的,那么具體使用無(wú)刷電機(jī)要注意什么呢
2020-06-28 17:15:05
;外部驅(qū)動(dòng)接在轉(zhuǎn)子上的話,轉(zhuǎn)子的轉(zhuǎn)動(dòng)如何連接才不會(huì)影響內(nèi)部線圈?請(qǐng)各位指點(diǎn)一二,多謝多謝!~推薦課程:課程名稱:張飛軟硬開源:基于STM32的BLDC直流無(wú)刷電機(jī)驅(qū)動(dòng)器(視頻+硬件)課程鏈接:[url
2019-02-18 10:23:37
無(wú)刷電機(jī)驅(qū)動(dòng)器具有接受電動(dòng)機(jī)的啟動(dòng)、停止、制動(dòng)信號(hào),以控制電動(dòng)機(jī)的啟動(dòng)、停止和制動(dòng)等功能,故障信號(hào)產(chǎn)生時(shí),無(wú)刷電機(jī)驅(qū)動(dòng)器立即切斷電機(jī)供電,并點(diǎn)亮Hall端口旁的L1故障指示燈,用戶可由此得知
2016-06-08 16:58:09
雙路直流無(wú)刷電機(jī)驅(qū)動(dòng)器有何優(yōu)點(diǎn)?雙路直流無(wú)刷電機(jī)驅(qū)動(dòng)器是怎樣同時(shí)驅(qū)動(dòng)兩個(gè)直流無(wú)刷霍爾電機(jī)的?
2021-09-22 06:00:22
如何驅(qū)動(dòng)三相橋式電路控制無(wú)刷電機(jī)
2023-10-28 06:13:06
如何使用主從定時(shí)器方式控制PWM波輸出給步進(jìn)電機(jī)驅(qū)動(dòng)器來(lái)控制步進(jìn)電機(jī)?
2021-11-18 07:59:44
怎樣去搭建一種三相無(wú)刷電機(jī)驅(qū)動(dòng)器的模型?如何對(duì)三相無(wú)刷電機(jī)驅(qū)動(dòng)器進(jìn)行仿真?
2021-07-21 06:45:45
如何將電機(jī)驅(qū)動(dòng)器與光隔離輸入連接有兩種方式連接:*1.共陰*2.共陽(yáng)極說(shuō)明:步進(jìn)電機(jī)驅(qū)動(dòng)器和常用的CNC控制板,USBCNC、MACH3、GRBL、TinyG等關(guān)于脈沖和方向的標(biāo)注不盡相同。STEP
2021-08-31 07:49:28
做位移測(cè)量時(shí),用步進(jìn)電機(jī)驅(qū)動(dòng)齒輪后帶動(dòng)位移臺(tái)運(yùn)動(dòng),然后用位移傳感器測(cè)量位移臺(tái)的位移,如測(cè)量示意圖所示。在測(cè)量中發(fā)現(xiàn),若給驅(qū)動(dòng)器供電,斷開驅(qū)動(dòng)器和電機(jī)之間的連接,位移傳感器測(cè)量值噪音較小;若驅(qū)動(dòng)器
2019-10-11 11:59:02
藍(lán)牙無(wú)線組網(wǎng)的優(yōu)點(diǎn)是什么?常見的三種無(wú)線接入方式是什么?藍(lán)牙無(wú)線組網(wǎng)原理與上網(wǎng)方案分享
2021-05-26 06:33:11
為什么會(huì)出現(xiàn)“共振”現(xiàn)象?如何去解決這個(gè)問(wèn)題?教你怎樣去制作一款無(wú)刷電機(jī)驅(qū)動(dòng)器?
2021-06-26 07:21:00
`步進(jìn)電機(jī)的驅(qū)動(dòng)方式有整步,半步,細(xì)分驅(qū)動(dòng)。三者即有區(qū)別又有聯(lián)系,目前,市面上很多驅(qū)動(dòng)器支持細(xì)分驅(qū)動(dòng)方式。本文主要描述這三種驅(qū)動(dòng)的概述。 如下圖是兩相步進(jìn)電機(jī)的內(nèi)部定子示意圖,為了使電機(jī)的轉(zhuǎn)子
2011-02-17 09:24:31
步進(jìn)電機(jī)驅(qū)動(dòng)器三種基本驅(qū)動(dòng)模式分別是:整步、半步、細(xì)分。其主要區(qū)別在于電機(jī)線圈電流的控制精度。通常步進(jìn)電機(jī)都有低頻振動(dòng)的特點(diǎn),通過(guò)細(xì)分調(diào)協(xié)可以改善電機(jī)低速動(dòng)運(yùn)行的平衡性。1、整步驅(qū)動(dòng)在整步運(yùn)行中
2018-08-31 10:45:13
1.步進(jìn)電機(jī)步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進(jìn)電機(jī)件。那么就需要驅(qū)動(dòng)器來(lái)接收脈沖信號(hào)并轉(zhuǎn)化為步進(jìn)電機(jī)的角位移,當(dāng)然還需要要發(fā)送脈沖的控制器或者PLC,還需要給控制器或者驅(qū)動(dòng)器
2021-09-07 07:33:38
步進(jìn)電機(jī)的三種驅(qū)動(dòng)方式
2016-01-12 17:03:44
節(jié)汽車座椅到天窗、車燈和空調(diào)系統(tǒng)。這些舒適性和必要性系統(tǒng)將根據(jù)乘客的喜好變得日益自動(dòng)化和程序化。下文將介紹TI可幫助您在趨勢(shì)中保持領(lǐng)先并推動(dòng)汽車車身電機(jī)創(chuàng)新的三種方式:1) 輕松集成車身電機(jī)驅(qū)動(dòng)器
2019-03-11 06:45:09
1、如果在交流電源和無(wú)刷電機(jī)驅(qū)動(dòng)器直流總線(如變壓器)之間沒有隔離的話,不要將直流總線的非隔離端口或非隔離信號(hào)的地接大地,這可能會(huì)導(dǎo)致設(shè)備損壞和人員傷害。因?yàn)榻涣鞯墓搽妷翰⒉皇菍?duì)大地的,在直流
2016-06-23 14:15:36
無(wú)刷電機(jī)驅(qū)動(dòng)器是由功率電子器件和集成電路組成的,其具有功率密度大,轉(zhuǎn)速高,調(diào)速范圍寬,力矩大,效率高等的優(yōu)點(diǎn);并且在功率較大的無(wú)刷電機(jī)中,驅(qū)動(dòng)電路和控制電路可各自成為一體;下面我們來(lái)說(shuō)說(shuō)其的控制
2016-06-20 15:24:32
無(wú)刷直流電機(jī)由電機(jī)行為主體和驅(qū)動(dòng)器組成,是典型性的機(jī)電一體化產(chǎn)品。電機(jī)轉(zhuǎn)子繞阻選用三相星型接口的方式,與三相交流的電機(jī)十分的相似。以便檢驗(yàn)發(fā)電機(jī)轉(zhuǎn)子的旋光性,在電動(dòng)機(jī)中安裝了相位傳感器。控制器由
2022-07-29 11:44:27
無(wú)刷電機(jī)即是將同步電機(jī)加上電子式控制(驅(qū)動(dòng)器),控制定子旋轉(zhuǎn)磁場(chǎng)的頻率并將電機(jī)轉(zhuǎn)子的轉(zhuǎn)速回授至控制中心反復(fù)校正,以期達(dá)到接近直流電機(jī)特性的方式。也就是說(shuō)直流無(wú)刷電機(jī)能夠在額定負(fù)載范圍內(nèi)當(dāng)負(fù)載變化時(shí)仍可
2016-11-01 14:35:27
無(wú)刷電機(jī)。用戶需按對(duì)應(yīng)霍爾線定義接入驅(qū)動(dòng)器。如果不知道線的對(duì)應(yīng)關(guān)系,請(qǐng)聯(lián)系公司技術(shù)支持。 4.H+、H-霍爾供電電源;以及外接調(diào)速電位器時(shí)或控制信號(hào)時(shí)公共電源;H+為5V,H-為地(GND)。作為信號(hào)電源
2015-07-31 10:02:19
相無(wú)刷電機(jī)驅(qū)動(dòng)器建模與仿真
2021-07-08 09:10:54
三相直流無(wú)刷電機(jī)是指具有三相的繞組、無(wú)電刷和換向器(或集電環(huán))的電機(jī),并采用直流電經(jīng)過(guò)逆變電路進(jìn)行驅(qū)動(dòng)的電機(jī)。與傳統(tǒng)的 有刷直流電機(jī)相比,直流無(wú)刷電機(jī)采用了電子換向取代有刷電機(jī)的機(jī)構(gòu)換向,取消了電刷
2019-10-15 16:30:07
鄙人硬件工程師一枚,在前一段時(shí)間設(shè)計(jì)了一款直流無(wú)刷伺服電機(jī)驅(qū)動(dòng)器(一拖二雙驅(qū)),經(jīng)過(guò)軟件工程師調(diào)試,已經(jīng)可以驅(qū)動(dòng)電機(jī),電機(jī)為100W直流無(wú)刷伺服電機(jī),轉(zhuǎn)速較為平穩(wěn),電機(jī)裝車之后表現(xiàn)良好。但隨著大量
2018-05-18 21:01:02
請(qǐng)群主詳細(xì)解釋下這三種啟動(dòng)方式,看了參考資料不是很明白其意!謝謝!
2019-07-17 04:35:12
怎樣去設(shè)計(jì)一種三相無(wú)刷電機(jī)驅(qū)動(dòng)器?如何對(duì)三相無(wú)刷電機(jī)驅(qū)動(dòng)器進(jìn)行仿真?
2021-07-21 06:21:27
伺服驅(qū)動(dòng)器中可以集成多少種電機(jī)驅(qū)動(dòng)控制電路?
2023-10-08 07:07:48
控制直流無(wú)刷電機(jī)和控制直流有刷電機(jī)的最大區(qū)別是什么?怎樣去設(shè)計(jì)一種無(wú)刷電機(jī)驅(qū)動(dòng)器 ?
2021-06-26 06:31:10
為配套24V直流電機(jī),設(shè)計(jì)了一種直流無(wú)刷電機(jī)驅(qū)動(dòng)器。采用美國(guó)Microchip公司的PIC16F690單片機(jī)作為控制器, MOSFET為驅(qū)動(dòng)元件, 配以相應(yīng)的控制軟件構(gòu)成控制系統(tǒng)。
2011-08-17 15:10:20 8817
8817 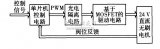
驅(qū)動(dòng)你的無(wú)刷電機(jī)
2013-09-05 11:32:03 135
135 JY01無(wú)刷電機(jī)驅(qū)動(dòng)器原理圖(高壓版)交流電輸入(220 V),如果輸入是交流電就得先經(jīng)轉(zhuǎn)換器轉(zhuǎn)成直流。
2016-02-19 17:15:560 無(wú)刷電機(jī)驅(qū)動(dòng)原理圖
2016-12-30 15:22:44160 無(wú)刷電機(jī)目前已在航模、醫(yī)療器械、家用電器、電動(dòng)車等多個(gè)領(lǐng)域得到廣泛應(yīng)用。本文主要介紹了五款無(wú)刷電機(jī)驅(qū)動(dòng)電路,另外還詳細(xì)介紹了三相直流無(wú)刷電機(jī)驅(qū)動(dòng)程序。
2018-05-09 15:21:49197180 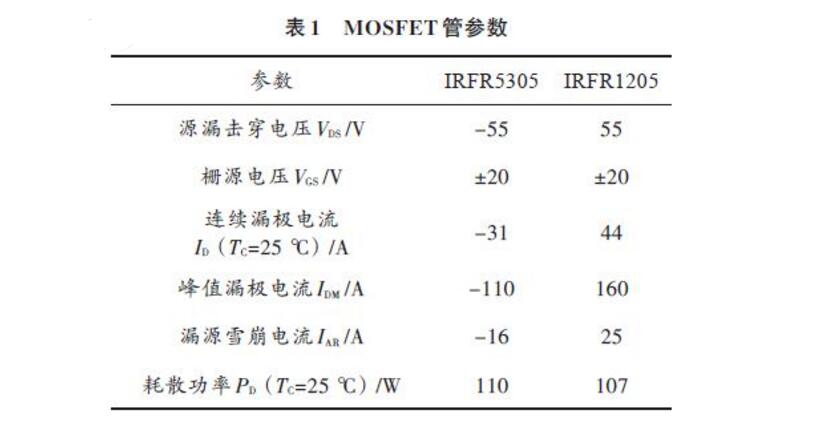
本視頻將使用安森美半導(dǎo)體的PWM預(yù)驅(qū)動(dòng)3相無(wú)刷電機(jī)驅(qū)動(dòng)器及直流風(fēng)扇電機(jī)速度控制器演示。
2018-06-04 01:47:006514 步進(jìn)電機(jī)驅(qū)動(dòng)器主要是區(qū)別在于步進(jìn)電機(jī)線圈電流的控制精度。主要有三種驅(qū)動(dòng)模式
2020-03-22 15:56:0012451 風(fēng)閥驅(qū)動(dòng)器有三種基礎(chǔ)的風(fēng)閥驅(qū)動(dòng)器方式:整步、越雷池、細(xì)分。其關(guān)鍵差別取決于電機(jī)電磁線圈電流量的線性度(即激磁方法)。 1、整步驅(qū)動(dòng)器 在整步運(yùn)作中,同一種步進(jìn)電機(jī)電機(jī)既可配整/越雷池驅(qū)動(dòng)器也能配細(xì)分
2021-02-24 12:00:382495 非單片機(jī)制作的簡(jiǎn)易直流有感無(wú)刷電機(jī)(BLDC)驅(qū)動(dòng)器(電源保護(hù)裝置是什么)-非單片機(jī)制作的簡(jiǎn)易直流有感無(wú)刷電機(jī)(BLDC)驅(qū)動(dòng)器非單片機(jī)制作的簡(jiǎn)易直流有感無(wú)刷電機(jī)(BLDC)驅(qū)動(dòng)器
2021-07-26 14:11:5660 無(wú)刷電機(jī)驅(qū)動(dòng)器資料BLDC-5015A(長(zhǎng)城電源技術(shù)廣西有限公司)-無(wú)刷電機(jī)驅(qū)動(dòng)器資料BLDC-5015A? ? ? ? ? ? ? ? ? ??
2021-09-18 17:28:50144 無(wú)刷直流電機(jī)由電機(jī)行為主體和驅(qū)動(dòng)器組成,是典型性的機(jī)電一體化產(chǎn)品。電機(jī)轉(zhuǎn)子繞阻選用三相星型接口的方式,與三相交流的電機(jī)十分的相似。以便檢驗(yàn)發(fā)電機(jī)轉(zhuǎn)子的旋光性,在電動(dòng)機(jī)中安裝了相位傳感器。控制器由輸出功率電子元器件和集成電路芯片等組成,那么直流無(wú)刷電機(jī)驅(qū)動(dòng)器芯片是如何挑選的?
2022-07-06 10:19:585943 直流無(wú)刷電機(jī)驅(qū)動(dòng)器芯片挑選的秘訣
2022-07-06 10:24:263198 感應(yīng)無(wú)刷電機(jī)驅(qū)動(dòng)器中的電流是必不可少的,即使它只是為了限流。如果要在整個(gè)工作范圍內(nèi)優(yōu)化性能和穩(wěn)定性,則電流讀數(shù)必須保持一致。有多種方法可以切換三相電橋,這會(huì)使電流檢測(cè)變得復(fù)雜。電流在橋內(nèi)流動(dòng)的方式并不總是很明顯,尤其是在考慮各種制動(dòng)和驅(qū)動(dòng)模式時(shí)。
2022-08-08 09:38:252532 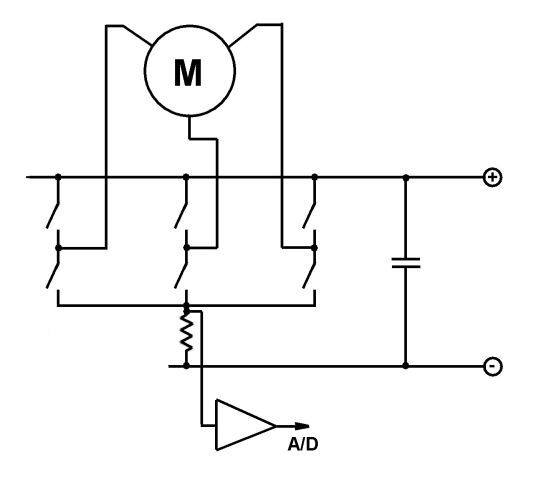
電子發(fā)燒友網(wǎng)站提供《帶磁編碼器的無(wú)刷電機(jī)驅(qū)動(dòng)器.zip》資料免費(fèi)下載
2022-08-15 09:11:2513 三相全波無(wú)刷電機(jī)通常通過(guò)控制和驅(qū)動(dòng)電路給電機(jī)激勵(lì)來(lái)實(shí)現(xiàn)驅(qū)動(dòng)。三相全波無(wú)刷電機(jī)驅(qū)動(dòng)的激勵(lì)方式有120度激勵(lì)驅(qū)動(dòng)和正弦波激勵(lì)驅(qū)動(dòng)兩種。三相全波無(wú)刷電機(jī)驅(qū)動(dòng)的每種方式都有其優(yōu)缺點(diǎn)。總體上來(lái)看,正弦波驅(qū)動(dòng)在控制精度、效率和噪聲方面具有優(yōu)勢(shì),但缺點(diǎn)是會(huì)增加系統(tǒng)的復(fù)雜性和成本。
2023-03-07 11:38:21687 
?直流無(wú)刷電機(jī) 【自制FOC驅(qū)動(dòng)器】深入淺出講解FOC算法與SVPWM技術(shù) | 稚暉的個(gè)人站 ? ? 寫得很清晰機(jī)器人硬件三大核心部件( 電機(jī) 、 減速器 、 驅(qū)動(dòng)器 ) 照這樣看來(lái),直流電機(jī)驅(qū)動(dòng)
2023-05-16 15:13:0222 電機(jī)和驅(qū)動(dòng)器簡(jiǎn)介一般性區(qū)別:有刷電機(jī)一般只需兩根接線端子就可以驅(qū)動(dòng),而無(wú)刷電機(jī)需要三根接線端子進(jìn)行驅(qū)動(dòng)。
2023-05-16 14:54:2732 上海莊瀾開發(fā)的分揀機(jī)臺(tái)車無(wú)刷電機(jī)驅(qū)動(dòng)器應(yīng)用在小型帶式輸送機(jī)臺(tái)車 48V滾筒電機(jī)驅(qū)動(dòng)器,功率400~800W,帶有電子伺服剎車功能。RS485控制模式或者 IO控制模式,
工業(yè)級(jí)設(shè)計(jì),使用在物流分撿機(jī)滾筒電機(jī)
2022-09-26 11:46:49555 
無(wú)刷電機(jī)必須要驅(qū)動(dòng)器才能轉(zhuǎn)嗎? 無(wú)刷電機(jī)是一種高效、低噪音、穩(wěn)定性好的電機(jī)。和傳統(tǒng)的有刷電機(jī)不同,無(wú)刷電機(jī)的轉(zhuǎn)子上沒有碳刷子,因此無(wú)需潤(rùn)滑,運(yùn)行更加穩(wěn)定。因?yàn)檫@些優(yōu)點(diǎn),無(wú)刷電機(jī)被廣泛應(yīng)用于各種領(lǐng)域
2023-09-28 17:25:302671 的參數(shù):了解伺服電機(jī)和驅(qū)動(dòng)器的額定電壓、額定電流、功率等參數(shù)。 準(zhǔn)備連接線路:為了保證電流傳輸?shù)目煽啃院头€(wěn)定性,選用合適的連接線,如高質(zhì)量的導(dǎo)線和插頭等。 二、連接方法 伺服電機(jī)與驅(qū)動(dòng)器的連接方法主要分為三種:
2023-12-20 09:47:321076
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論