本體、減速器、伺服電機(jī)、控制器、傳感器與驅(qū)動(dòng)器等關(guān)鍵零部件及系統(tǒng)集成設(shè)計(jì)制造等技術(shù)瓶頸。致遠(yuǎn)電子長久以來專注伺服電機(jī)動(dòng)態(tài)測(cè)試,在控制時(shí)間響應(yīng)、階躍響應(yīng)、頻帶寬度試驗(yàn)等測(cè)試上擁有豐富的經(jīng)驗(yàn),齒槽轉(zhuǎn)矩測(cè)試臺(tái)的推出更是助力伺服電機(jī)的測(cè)試進(jìn)入一個(gè)更全面的時(shí)代。
2016-12-12 14:56:23 9231
9231 當(dāng)前值寄存器D8341,D8340,它實(shí)時(shí)記錄并存儲(chǔ)工作臺(tái)距原點(diǎn)位置。當(dāng)定位執(zhí)行輸出正轉(zhuǎn)脈沖時(shí),當(dāng)前寄存器中的值增加,當(dāng)定位指令輸出反轉(zhuǎn)脈沖時(shí),當(dāng)前值寄存器中的值遞減。
2024-03-04 10:26:27170 
1500走EPOS模式控制V90增量式編碼器電機(jī),限位和原點(diǎn)能直接接伺服驅(qū)動(dòng)上嗎?為什么回原點(diǎn)是碰到限位是伺服回報(bào)警,可以設(shè)置成碰到限位反轉(zhuǎn)的回原點(diǎn)方式嗎
2024-01-09 12:31:28
最近發(fā)現(xiàn)友友們有時(shí)候會(huì)遇到開機(jī)前伺服電機(jī)不能回原點(diǎn)或者回原點(diǎn)過程需要相當(dāng)長的時(shí)間而且原點(diǎn)位置不對(duì)的問題。造成以上原因主要有以下幾點(diǎn):1.編碼器有問題,更換編碼器。2.有點(diǎn)位近接開關(guān)的靈敏度有問題。3.在伺服器里面把參數(shù)清0。
2021-10-14 17:06:40
硬件:Copley 驅(qū)動(dòng)器ACJ-055-18+Maxon DCX-35L電機(jī)1、原點(diǎn)回零方式簡介:有幾種原點(diǎn)回零方法,每種方法建立:原點(diǎn)參考(限位或原點(diǎn)開關(guān)轉(zhuǎn)換或編碼器索引脈沖)運(yùn)動(dòng)方向以及索引
2021-09-03 07:55:24
原點(diǎn)回零方式是什么?原點(diǎn)回零的配置過程是怎樣的?
2021-09-30 09:01:49
請(qǐng)教:
? ? ? ? 從CorePac文檔中得知,L1和L2的?Error Detection and Correction功能在最初是禁止的。那么在應(yīng)用中有必要將它使能嗎?它會(huì)提高RAM訪問的正確性是嗎?會(huì)不會(huì)影響訪問效率呢?
2018-06-21 12:10:38
硬件:Copley 驅(qū)動(dòng)器ACJ-055-18+Maxon DCX-35L電機(jī)1、原點(diǎn)回零方式簡介:有幾種原點(diǎn)回零方法,每種方法建立:原點(diǎn)參考(限位或原點(diǎn)開關(guān)轉(zhuǎn)換或編碼器索引脈沖)運(yùn)動(dòng)方向以及索引
2021-09-03 07:03:06
SAA認(rèn)證-罰則輸往澳洲的電器產(chǎn)品,必須符合電器安全及電磁兼兼容性標(biāo)準(zhǔn),如果未能達(dá)到要求會(huì)收到以下處理: ◆ 扣留或沒收產(chǎn)品 ◆ 或罰款,一般個(gè)人約罰美金10,000元,公司則約美金200,000元
2013-06-14 15:06:42
根據(jù)德國技術(shù)設(shè)備及消費(fèi)品委員會(huì)(ATAV)的決定,對(duì)于2008年4月1日之后進(jìn)行GS認(rèn)證的產(chǎn)品,必須測(cè)試美國環(huán)保署(EPA)關(guān)注的16種多環(huán)芳香烴(PAH)以確保符合相關(guān)要求,而對(duì)于2008年4月1日前已獲得認(rèn)證的產(chǎn)品,則必須在1年內(nèi)進(jìn)行針對(duì)PAH的風(fēng)險(xiǎn)分析,如不能符合PAH相關(guān)規(guī)定的產(chǎn)品將被撤銷認(rèn)證。
2016-12-26 10:20:16
在電纜入口處接地;
6)如果PCB面積允許,并且整機(jī)系統(tǒng)的搭接、靜電泄放通道都很好,可以在PCB周圍設(shè)置接地防護(hù)環(huán),可裸銅處理,并采用很多過孔連接。
三、防靜電設(shè)計(jì)的可制造性檢查
這里推薦一款國產(chǎn)免費(fèi)
2023-05-08 18:28:47
`雷擊過壓防護(hù)的
必要性:RS-485接口帶電拔插和抖動(dòng)都會(huì)引起電壓的劇烈變化,都會(huì)使芯片損壞,而RS485總線實(shí)行長距離傳輸(1200米以上),而且其傳輸線通常暴露于戶外,因此極易因?yàn)槔讚舻仍蛞?/div>
2015-07-30 17:06:31
我正在瀏覽上面提到的Amp的數(shù)據(jù)表,任何人都可以解釋一下TDA7498MV中頻移的必要性
2019-08-13 06:59:46
西門子V90伺服用FB284塊的EPOS模式,回零完成后,一跑絕對(duì)定位就會(huì)丟失原點(diǎn)(Axisref變成False),沒有報(bào)警代碼。跑點(diǎn)動(dòng)則不會(huì)丟失原點(diǎn)。請(qǐng)問這種情況應(yīng)該怎么解決?
2023-06-12 16:49:37
本人新手,正學(xué)lv運(yùn)動(dòng)卡控制,這方面資料很少,特別是原點(diǎn)搜索的具體過程,找不到資料。OMRON PLC原點(diǎn)搜索是先搜索到原點(diǎn)接近感應(yīng)開關(guān)后,再檢測(cè)到Z相脈沖或原點(diǎn)感應(yīng)開關(guān),此點(diǎn)即為伺服原點(diǎn)。但不
2017-06-08 21:40:35
1三菱FX系列控制步進(jìn)電機(jī)回原點(diǎn)2、DZRN回原點(diǎn)默認(rèn)是負(fù)方向回原點(diǎn)不能控制回原點(diǎn)方向,若要從正方向回原點(diǎn),需要用DSZR是帶DOG搜索的原點(diǎn)回 歸指令;例如 DSZR X00 X01 Y00
2021-07-08 08:01:17
因?yàn)槿魏萎a(chǎn)品在運(yùn)送、使用、保存、中會(huì)產(chǎn)生碰撞、振動(dòng),使產(chǎn)品在某一段時(shí)間產(chǎn)生不良,嚴(yán)重影響產(chǎn)品的使用和不必要的經(jīng)濟(jì)損失,為了避免這事態(tài)的發(fā)生我們就要提早知道產(chǎn)品或產(chǎn)品中的部件的耐振壽命。 1. 任何
2015-08-04 17:24:19
嗨,我想知道使用DIFF_SSTL18_I I / O標(biāo)準(zhǔn)的外部參考電阻的必要性。在UG190,V5用戶指南,第226頁中,有一些I / O標(biāo)準(zhǔn)規(guī)定,DCI功能不需要外部參考電阻,其中
2020-06-02 11:11:50
在一條絲桿的中間安裝一個(gè)原點(diǎn)感應(yīng)器,只有這一個(gè),這樣用PLC找原點(diǎn)比較合適,因?yàn)楣ぷ鲿r(shí)是會(huì)原點(diǎn)上下都去的,用普通原點(diǎn)復(fù)歸在異常斷電時(shí),如果在原點(diǎn)另一邊則會(huì)找不到原點(diǎn)可以自己寫一個(gè)會(huì)原點(diǎn)程序,向前走
2021-06-28 07:22:52
何為去耦技術(shù)?正確去耦有何必要性?去耦電容有哪些類型?不良去耦技術(shù)對(duì)性能的影響是什么
2021-03-11 08:14:14
`圖書館、檔案館的RFID智能化管理必要性`
2021-01-13 09:33:45
硬件:Copley 驅(qū)動(dòng)器ACJ-055-18+Maxon DCX-35L電機(jī)1、原點(diǎn)回零方式簡介:有幾種原點(diǎn)回零方法,每種方法建立:原點(diǎn)參考(限位或原點(diǎn)開關(guān)轉(zhuǎn)換或編碼器索引脈沖)運(yùn)動(dòng)方向以及索引
2021-06-28 10:04:46
基于DS402協(xié)議的伺服電機(jī)原點(diǎn)回零模式怎么實(shí)現(xiàn)?
2021-09-30 06:29:57
`實(shí)戰(zhàn)及必要性的閃光燈M模式 很多癡迷于「神燈」的攝影朋友們,其中一個(gè)重要的理由是,現(xiàn)代閃光燈比較方便的 TTL 模式,讓閃光燈運(yùn)用起來不需要了解太多原理和技巧,便可以將光線補(bǔ)的差不多合適的范圍內(nèi)
2014-06-25 15:04:35
較GaN FET與硅FET二者的退化機(jī)制,并討論波形監(jiān)視的必要性。使用壽命預(yù)測(cè)指標(biāo)功率GaN落后于RF GaN的主要原因在于需要花時(shí)間執(zhí)行數(shù)個(gè)供貨商所使用的成本縮減策略。最知名的就是改用6英寸的硅基板,以及
2019-07-12 12:56:17
嵌入式Linux使用bash的必要性一直以來嵌入式ARM linux的默認(rèn)shell多數(shù)是busybox自帶的ash,該shell可以看做是bash的裁剪版本,僅支持bash的部分功能。雖然ash
2021-12-16 08:06:04
關(guān)于伺服回原.我使用三菱PLC控制一個(gè)臺(tái)達(dá)伺服系統(tǒng)與一個(gè)步進(jìn)系統(tǒng), 通過臺(tái)達(dá)HMI界面做一些操作.為了方便使用, 想在出現(xiàn)異常時(shí), 可以快速排除后一鍵回原點(diǎn), 而不需要手動(dòng)移動(dòng)電機(jī)到原點(diǎn)的一側(cè).這個(gè)
2021-06-28 12:17:10
文章目錄【 0. 接口電路 】【P0口】【P1口】【P2口】【P3口】【 0. 接口電路 】接口電路的必要性:\color{red}{接口電路的必要性:}接口電路的必要性:?計(jì)算機(jī)對(duì)外設(shè)進(jìn)行數(shù)據(jù)操作
2021-07-29 08:09:28
各位!我們伺服電機(jī)是1FK7063-5AF71-1UG0,我更換相同型號(hào)的伺服電機(jī)為什么打電話問西門子專家 一個(gè)說需要做原點(diǎn)回零,另外一個(gè)西門子專家說不需要的,到底要不要,請(qǐng)專業(yè)人士做答?
2023-11-10 08:19:06
我的cache理解:使用cache主要目的在于,它的讀寫速度與CPU的頻率一致,效率高。但是如果我的DDR2也有300M的帶寬的話,那么cache是否還有使用的必要性?
2018-06-21 11:15:22
機(jī)床數(shù)控化改造的必要性及其改造方法 : 本文首先介紹了機(jī)床數(shù)控化改造的必要性,然后簡單介紹了機(jī)床數(shù)控化改造的內(nèi)容及其的優(yōu)缺點(diǎn),而重點(diǎn)在于介紹如何進(jìn)行機(jī)床數(shù)控化改造,包括數(shù)控系統(tǒng)的選擇、數(shù)控改造中
2021-09-09 08:27:52
機(jī)床進(jìn)行數(shù)控化改造的必要性是什么?如何進(jìn)行改造?
2021-11-04 06:37:44
步進(jìn)伺服電機(jī)回原點(diǎn)的常用方法是什么?
2021-09-29 07:18:40
但是實(shí)找零的方法有很多種,步進(jìn)伺服電機(jī)自身可以完成,上位機(jī)配合也可以完成,下面就來介紹下回原點(diǎn)的常見方法有以下幾種。一、步進(jìn)伺服電機(jī)在工作的時(shí)候,處于一直轉(zhuǎn)動(dòng)的狀態(tài),但當(dāng)它碰到原點(diǎn)開關(guān)的時(shí)候,伺服
2021-06-28 08:52:50
公司帶來可觀的收益,等等。鑒于機(jī)器視覺檢測(cè)的優(yōu)勢(shì),以下是四元數(shù)數(shù)控對(duì)機(jī)器視覺檢測(cè)在以下行業(yè)中的應(yīng)用和必要性的簡要描述。一、在緊固件行業(yè)中的應(yīng)用緊固件,也稱為標(biāo)準(zhǔn)零件,是將兩個(gè)或多個(gè)零件(或組件)固定并
2021-05-13 09:44:56
直流電源的紋波系數(shù)監(jiān)測(cè)必要性介紹了紋波的產(chǎn)生;分析了對(duì)紋波進(jìn)行監(jiān)測(cè)的原因,直流紋波系數(shù)監(jiān)測(cè)對(duì)電網(wǎng)安全運(yùn)行的重要性,及目前直流電源成套裝置存在的問題,并結(jié)合實(shí)際闡述了常規(guī)監(jiān)測(cè)的方式,說明了對(duì)直流電源的紋波系數(shù)進(jìn)行監(jiān)測(cè)的必要性。 [hide][/hide]
2009-12-22 11:16:30
【摘 要】防雷工作保護(hù)的對(duì)象一般分為三種:建筑、設(shè)備和人。當(dāng)今世界,隨著網(wǎng)絡(luò)信息建設(shè)平均水平的不斷提高、精密設(shè)備的廣泛使用,與之相關(guān)的保護(hù)技術(shù)也日益提升,下文將簡述計(jì)算機(jī)網(wǎng)絡(luò)防雷的必要性,對(duì)網(wǎng)絡(luò)
2021-09-01 07:50:30
`芯片返修即通過將失效的元件從失效位置取下,代之以正確的元件,從而恢復(fù)產(chǎn)品全部正確特性的工藝過程。芯片返修的必要性:1.高價(jià)值的產(chǎn)品2.工藝復(fù)雜的產(chǎn)品3.科研需要4.OEM/EMS成本控制的需要`
2020-05-09 16:34:01
虛擬儀器由那幾部構(gòu)成?虛擬儀器為什么要校準(zhǔn)?有什么必要性?
2021-04-12 06:10:39
,用戶可以方便地用這些完成常規(guī)的虛擬儀器測(cè)量任務(wù),從而大大降低了虛擬儀器開發(fā)的復(fù)雜性,從而使虛擬儀器的廣泛使用成為可能。3 虛擬儀器校準(zhǔn)的必要性 虛擬儀器的測(cè)量準(zhǔn)確度與所采用的虛擬儀器卡的準(zhǔn)確度及測(cè)試
2019-04-22 09:40:04
請(qǐng)問一體化伺服電機(jī)編碼器值清零或設(shè)置原點(diǎn)如何操作?
2021-09-26 07:11:13
請(qǐng)問如何實(shí)現(xiàn)一鍵伺服回原點(diǎn)?
2021-10-13 06:30:34
什么是車載Ethernet車載Ethernet降噪措施的必要性
2020-12-30 06:49:44
安全完整性等級(jí)的認(rèn)證的重要性和必要性
主要講述功能安全(安全完整性等級(jí))的認(rèn)證的重要性和必要性。簡單敘述了認(rèn)證使用的標(biāo)準(zhǔn)、認(rèn)證的模式和認(rèn)證的內(nèi)
2010-04-01 14:16:20 26
26 外貿(mào)下滑凸顯電子商務(wù)模式創(chuàng)新的必要性
2009年中國外貿(mào)經(jīng)濟(jì)受全球金融危機(jī)的影響下滑嚴(yán)重。根據(jù)中國海關(guān)的統(tǒng)計(jì),今年1至7月,我
2009-10-16 11:52:05508 機(jī)床數(shù)控化改造的必要性及其改造方法
本文首先介紹了機(jī)床數(shù)控化改造的必要性,然后簡單介紹了機(jī)床數(shù)控化改造的內(nèi)
2010-02-24 15:48:281696 2015-01-13 15:38:3528 傳統(tǒng)光學(xué)儀器 到現(xiàn)代光學(xué)儀器的 zhuanbian必要性。
2016-05-04 14:09:5625 復(fù)雜環(huán)境下基于角點(diǎn)回歸的全卷積神經(jīng)網(wǎng)絡(luò)的車牌定位_羅斌
2017-01-08 10:11:410 由PLC與伺服電機(jī)組成一個(gè)系統(tǒng),通過PLC控制伺服電機(jī),實(shí)現(xiàn)機(jī)構(gòu)的原點(diǎn)回歸、相對(duì)定位和絕對(duì)定位功能
2017-11-13 06:01:0032048 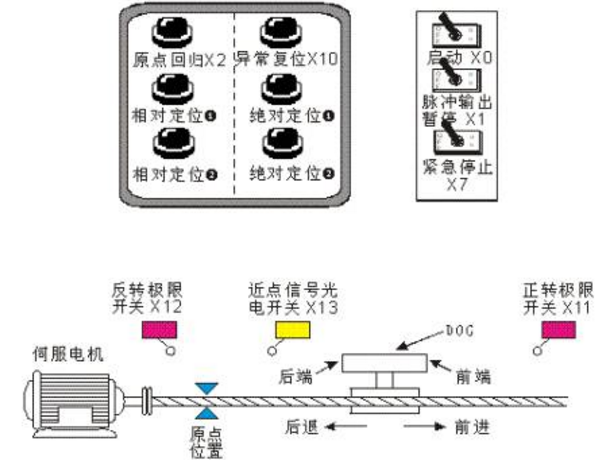
DZRN K20000 K3000 X12 Y0這是一個(gè)回原點(diǎn)指令,K20000表示剛開始回原點(diǎn)的脈沖頻率,當(dāng)檢測(cè)到X12的上升沿后,脈沖輸出頻率降為3000。當(dāng)再檢測(cè)到X12的下降沿后,脈沖輸出停止。脈沖輸出端為Y0。
2018-01-08 15:23:4728508 一般來說,伺服電機(jī)的編碼器有兩種,絕對(duì)值編碼器和相對(duì)值編碼器。絕對(duì)值編碼器斷電可以保持,只要電池還有電,是不需要尋原點(diǎn)的;相對(duì)編碼器由于斷電后會(huì)丟失電機(jī)多圈數(shù)值,故需要尋原點(diǎn)操作。
2018-02-05 09:09:3423452 本文首先介紹了單片機(jī)晶振的必要性,其次介紹了單片機(jī)的作用和原理,最后闡述了單片機(jī)晶振的常見問題。
2018-04-18 11:49:2972447 PLC上設(shè)計(jì)了停止指令,遠(yuǎn)點(diǎn)回歸,近點(diǎn)信號(hào),中斷信號(hào),以及正反轉(zhuǎn)限位等。
2019-06-11 16:11:019292 
通過PLC給伺服驅(qū)動(dòng)器發(fā)驅(qū)動(dòng)脈沖,通過改變脈沖頻率來控制移動(dòng)速度,通過改變脈沖數(shù)量來改變移動(dòng)量,控制步進(jìn)電機(jī)移動(dòng)方向。
伺服驅(qū)動(dòng)器是執(zhí)行機(jī)構(gòu),在接收到PLC發(fā)來的信號(hào),控制電機(jī)來運(yùn)動(dòng),通過位置編碼器精準(zhǔn)定位。
2019-06-30 10:15:3639615 
智能疏散系統(tǒng)的必要性是什么?在現(xiàn)階段,隨著我國經(jīng)濟(jì)不斷發(fā)展趨勢(shì)的加快,住宅建筑具有復(fù)雜的特點(diǎn)。近年來,我國的高層住宅建筑、大中型建筑、綜合型公共建筑也越來越多。隨著這種現(xiàn)代建筑的提高,我發(fā)現(xiàn)這種建筑
2021-02-08 10:28:00662 多線程架構(gòu)存在的必要性說明。
2021-03-26 11:22:248 伺服驅(qū)動(dòng)器有必要裝濾波器嗎?有太多的人問過青島綠bo杰能這個(gè)問題。青島lv波杰能的答案是肯定的。伺服驅(qū)動(dòng)器確實(shí)有必要裝MLAD-S伺服專用濾波器,但不是必須加濾波器,這是因?yàn)榭紤]到成本以及安裝空間等現(xiàn)實(shí)問題。
2021-10-22 17:12:305449 
杭州繼保電氣小編今天來和大家分享一下防孤島保護(hù)裝置對(duì)于光伏電站的必要性。
2022-06-15 15:09:093626 德國GMC-I高美測(cè)儀(上海電勵(lì)士)生產(chǎn)除顫器分析儀;講解除顫器分析儀測(cè)試下的除顫儀種類和除顫器分析儀對(duì)除顫器質(zhì)控的必要性。
2022-09-06 11:05:51338 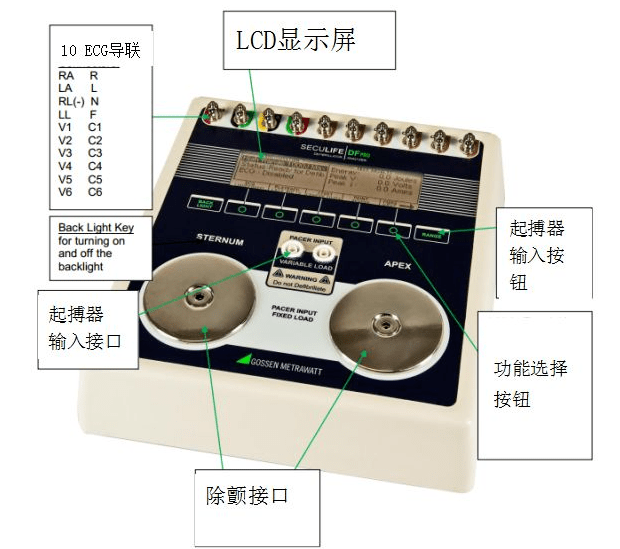
基于模型的 GaN PA 設(shè)計(jì)基礎(chǔ)知識(shí):內(nèi)部電流-電壓 (I-V) 波形的定義及其必要性
2022-12-26 10:16:231150 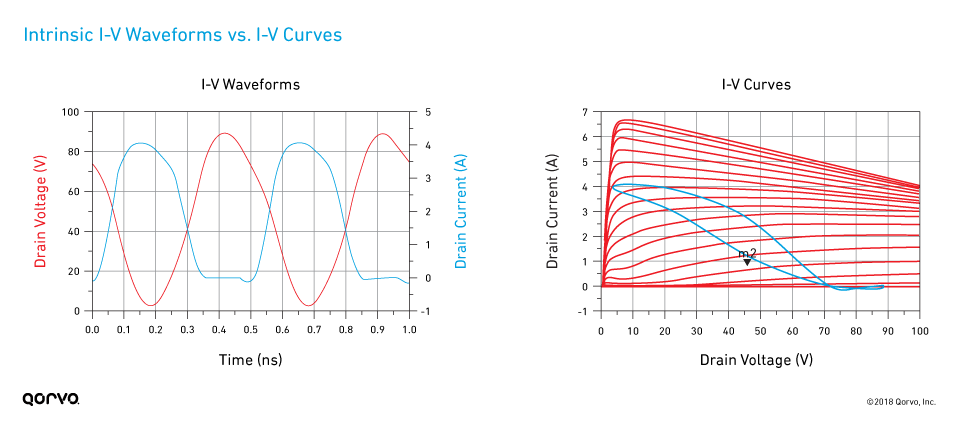
一站式PCBA智造廠家今天為大家講講電路板加工完成后為什么要做PCBA測(cè)試?PCBA測(cè)試操作步驟。很多客戶對(duì)于電路板加工完成后還需要做PCBA測(cè)試有疑問,主要是對(duì)其必要性有疑慮以及想了解PCBA測(cè)試是怎么做的,接下來為大家分析電路板加工完成后為什么要做PCBA測(cè)試。
2023-02-10 09:54:212110 白皮書:功率 GaN 技術(shù):高效功率轉(zhuǎn)換的必要性-nexperia_whitepaper_...
2023-02-17 19:50:460 在PLC控制定位系統(tǒng)中,通常會(huì)用到相對(duì)定位、絕對(duì)定位、表格定位、原點(diǎn)回歸等功能,針對(duì)FX5U PLC可以使用正轉(zhuǎn)極限、反轉(zhuǎn)極限,利用DOG搜索功能進(jìn)行原點(diǎn)回歸。
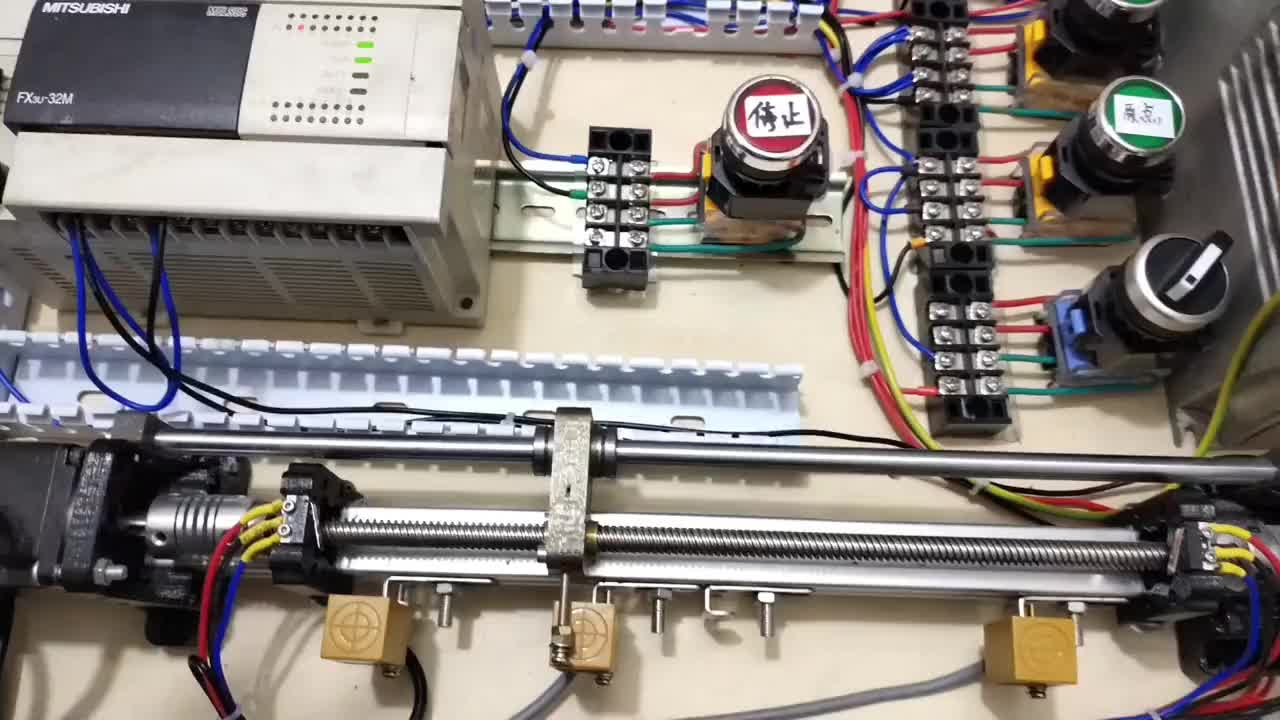
2023-03-10 14:17:044340 在這里我們使用的是三菱FX—3U的PLC與松下A5的伺服驅(qū)動(dòng)器,我們?cè)赑LC上設(shè)計(jì)了停止指令,遠(yuǎn)點(diǎn)回歸,近點(diǎn)信號(hào),中斷信號(hào),以及正反轉(zhuǎn)限位等。
2023-03-29 11:43:565920 作者:高玉光?北京市信利(深圳)律師事務(wù)所 2023/06/05于深圳 #本文僅代表作者觀點(diǎn),未經(jīng)作者許可,禁止轉(zhuǎn)載# 標(biāo)準(zhǔn)專利必要性含義 歐洲電信標(biāo)準(zhǔn)協(xié)會(huì)(ETSI)認(rèn)為,標(biāo)準(zhǔn)必要專利中的“必要
2023-06-07 08:45:03506 
零點(diǎn)位置是通過程序復(fù)位控制回零或者在回零過程中感應(yīng)到原點(diǎn)限位的時(shí)候,把當(dāng)前位置值清零,表示原點(diǎn)或零點(diǎn),一切位置都是以原點(diǎn)為基礎(chǔ),確定零點(diǎn)位置的時(shí)候,應(yīng)先確定運(yùn)動(dòng)的正向和負(fù)向,以及電機(jī)的實(shí)際運(yùn)動(dòng)方向。
2023-07-24 16:10:356149 通過PLC給伺服驅(qū)動(dòng)器發(fā)驅(qū)動(dòng)脈沖,通過改變脈沖頻率來控制移動(dòng)速度,通過改變脈沖數(shù)量來改變移動(dòng)量,控制步進(jìn)電機(jī)移動(dòng)方向。
2023-09-26 15:46:181075 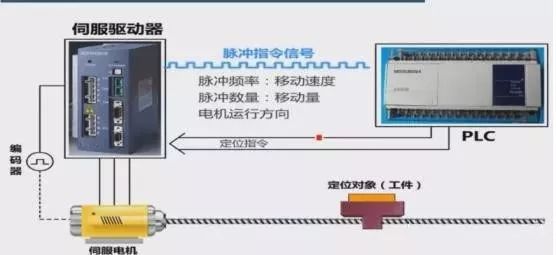
通過一個(gè)FX3U的CPU就可以帶三個(gè)軸的伺服驅(qū)動(dòng)器。PLC的脈沖輸出端是固定的,Y0、Y1、Y2。具體是否具備脈沖輸出可看模塊的手冊(cè)。其余的Y可以作為方向的輸出端。輸出的最大脈沖頻率為100KHz。
2023-10-26 10:08:211459 
何謂正確去耦?有何必要性? 如果電源引腳上存在紋波和/或噪聲,大多數(shù)IC都會(huì)有某種類型的性能下降。數(shù)字IC的噪聲裕量會(huì)降低,時(shí)鐘抖動(dòng)則可能增加。對(duì)于高性能數(shù)字IC,例如微處理器和FPGA,電源額定
2023-11-28 16:16:530 電子發(fā)燒友網(wǎng)站提供《何謂正確去耦?有何必要性?.pdf》資料免費(fèi)下載
2023-11-30 09:25:370 什么是伺服電機(jī)的原點(diǎn)設(shè)置?伺服電機(jī)零點(diǎn)和原點(diǎn)的區(qū)別 伺服電機(jī)的原點(diǎn)設(shè)置,簡單來說,就是確定電機(jī)的起始位置或參考位置。在使用伺服電機(jī)控制系統(tǒng)時(shí),需要將電機(jī)的位置與設(shè)定的參考位置進(jìn)行對(duì)齊,以確保精準(zhǔn)
2023-12-25 13:57:591135 在伺服電機(jī)系統(tǒng)中,通常會(huì)有兩個(gè)重要的參考位置,即伺服電機(jī)零點(diǎn)和原點(diǎn)。伺服電機(jī)零點(diǎn)是指電機(jī)的初始位置,也可以理解為初始零位或歸零位置。
2024-01-05 10:27:02585 編碼器的原點(diǎn)功能主要用于確定位置參考、啟動(dòng)和停止控制、運(yùn)動(dòng)方向判斷以及定位回歸操作。這些功能對(duì)于許多應(yīng)用中的位置測(cè)量、運(yùn)動(dòng)控制和定位操作至關(guān)重要。
2024-01-18 14:55:43534 ? 編碼器原點(diǎn)有什么功能 編碼器的原點(diǎn)功能主要用于確定位置參考、啟動(dòng)和停止控制、運(yùn)動(dòng)方向判斷以及定位回歸操作。這些功能對(duì)于許多應(yīng)用中的位置測(cè)量、運(yùn)動(dòng)控制和定位操作至關(guān)重要。 編碼器的原點(diǎn)具有以下功能
2024-02-21 15:02:11157 零點(diǎn)位置是通過程序復(fù)位控制回零或者在回零過程中感應(yīng)到原點(diǎn)限位的時(shí)候,把當(dāng)前位置值清零,表示原點(diǎn)或零點(diǎn),一切位置都是以原點(diǎn)為基礎(chǔ),確定零點(diǎn)位置的時(shí)候,應(yīng)先確定運(yùn)動(dòng)的正向和負(fù)向,以及電機(jī)的實(shí)際運(yùn)動(dòng)方向。
2024-03-20 14:07:4746  電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論