 電子發燒友App
電子發燒友App


步進電機是一種控制簡單、使用方便的位置開環電機,廣泛應用于辦公自動化、安防監控、3D打印和汽車電機等領域。電機驅動芯片是包含了速度控制、力矩控制、位置控制及各種保護等功能的集成電路,根據輸入信號,按照內置的算法邏輯控制電機的運轉。步進電機驅動芯片決定著電機運轉效果,也就是步進電機運行的平穩性、振動和噪音。對這些性能影響非常大但又難以理解的就是續流Current Recirculation的控制。
本文從基礎電機等效模式介紹開始,深入闡述續流各衰減模式Decay Mode的理解、各自優缺點和適用性、與剎車Brake的差異等,以此進行更為復雜靈活的續流控制,就更能夠適應不同參數的電機,從而達到電機平穩性與振動和噪音的最優效果。最后以Chipown高性能步進電機驅動芯片PN7781系列為例,說明續流衰減模式的靈活控制。
?電機等效電路?
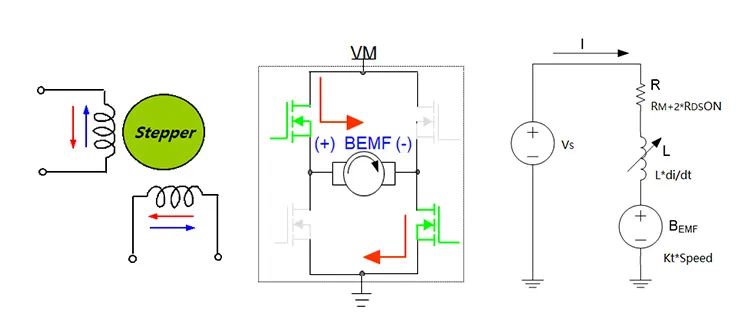
圖1 電機(一相)等效電路
如圖1所示,步進電機(以常見的雙極性)包含兩個線圈,以電機單線圈為例說明等效電路,其可以等效于三部分組成:線圈內阻RM、線圈電感L和電機反電動勢BEMF。
其中BEMF電壓等于反電動勢常數Kt乘以轉速(Hz),即和電機轉速成正比。圖中也考慮到驅動芯片的高低邊內阻RDSON,所以驅動Drive階段的基本等效電路如圖1所示,等效公式:?

一般來說由于內阻較小,I*R電壓一般較小,當電機處于啟動階段轉速很小,反電動勢很小,則大部分電壓會加載到L*di/dt,電流急速上升。而當電機處于最高轉速時,反電動勢最大,電感電壓則最小,電流變化相對較小。
?什么是電機電流的續流衰減??
?
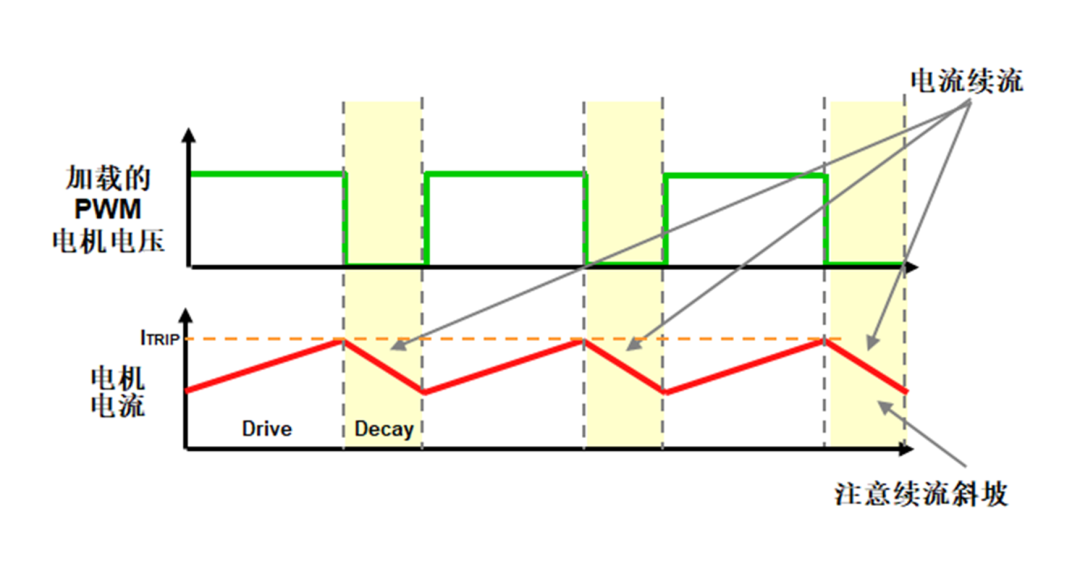
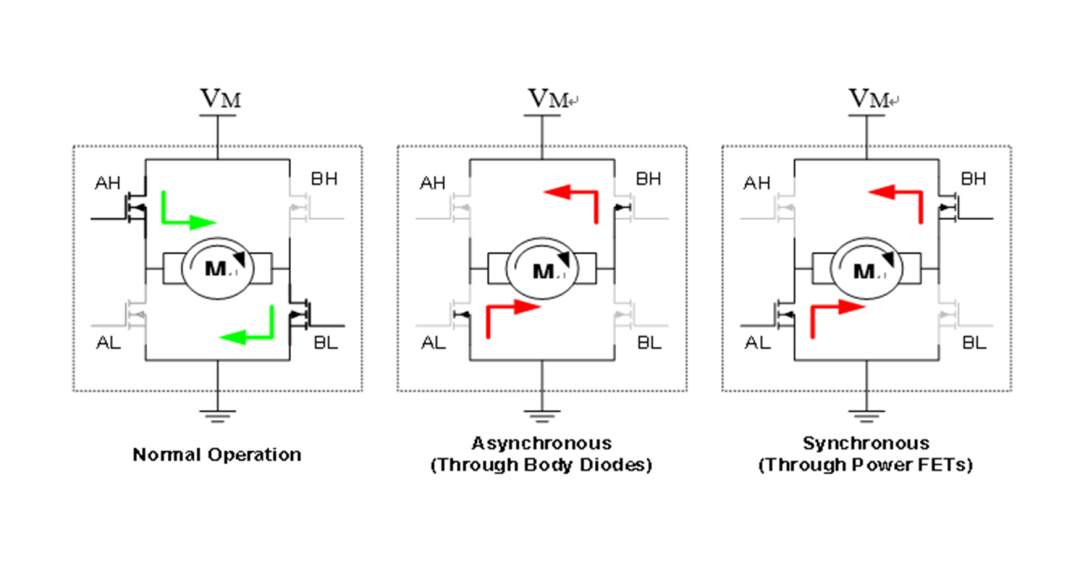
圖2 續流、異步和同步續流
如圖2所示,以單個線圈驅動的全橋電路為例,首先AH、BL的MOS打開,電流從VM由左往右到地,這是電機驅動Drive階段,當電流達到設定電流值時,關閉所有MOS,此時線圈電感效應,電流會繼續從左到右流動并衰減Decay。
電流衰減的兩種途徑
1? 異步衰減
通過MOS的體二極管衰減,如圖二中示意,由地到VM,這是異步衰減。
2??同步衰減
通過打開斜對角的BH、AL的MOS,電流還是由地到VM,這稱為同步衰減。
這種異步衰減和同步衰減的途徑就是電流續流(Current Recirculation)。
顯而易見,異步衰減經過MOS體二極管,壓降大所以損耗(2*I*VD)也大,而同步衰減經過MOS的Rdson,一般內阻較小所以損耗(I^2*Rdson*2)也小。后文主要以同步衰減來說明。
為方便下文,先介紹下電機驅動和電流衰減的幾個關鍵參數?– ITRIP、tDRIVE、tBLANK、tOFF。
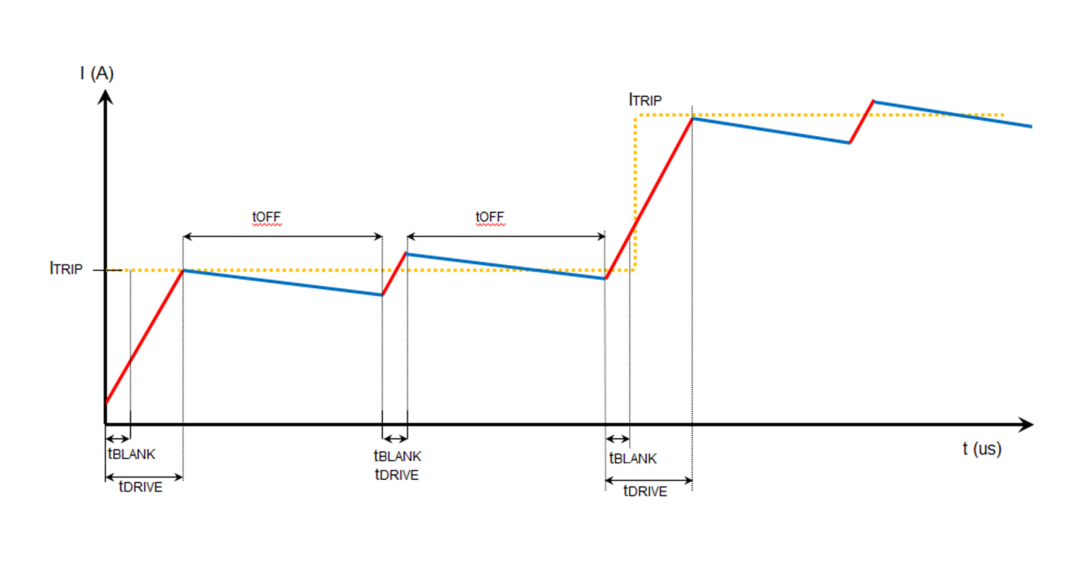
圖3 關鍵參數說明
如圖3所示,黃虛線ITRIP就是本時段內驅動芯片設定的電流值,ITRIP按照步進電機細分控制所需的電流臺階而變化,圖3就是一段電流臺階往上增長的例子。
tDRIVE是驅動階段的時間,這里需要注意起始有個tBLANK消隱時間(一般幾個us以內),主要是為了避開(不檢測)MOS管打開時刻的電流噪音毛刺,防止誤觸發過流保護。
可以理解的是tBLANK太小起不了作用,太大則可能導致后續的tDRIVE不足,特別是在一個電流正弦周期內所需tBLANK不同,若簡單一個固定值,則電流波形過零點失真明顯。
tOFF則是整個電流續流時段。tOFF時間到期后,H橋重新啟用,開始另一個PWM循環。
電流續流的衰減模式
電流續流的三種控制模式
1??慢衰減 Slow Decay
2??快衰減 Fast Decay
3??混合衰減 Mixed Decay
注:這里的所謂“快”“慢”是指續流期間電流衰減到零的相對速度。
1慢衰減 Slow Decay
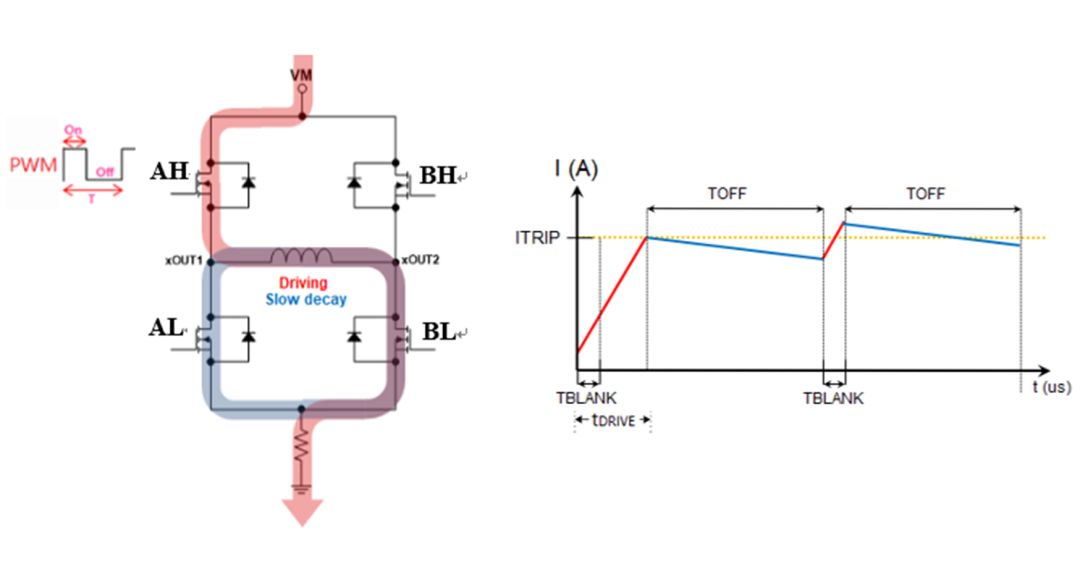
圖4 慢衰減 Slow Decay
首先正常驅動Drive階段,如圖4紅色電流方向(AH、BL打開),然后關掉AH、BL,并打開下橋臂的AL、BL兩個驅動管,電流繼續從左往右經過線圈順時針閉環衰減,如圖4藍色電流。
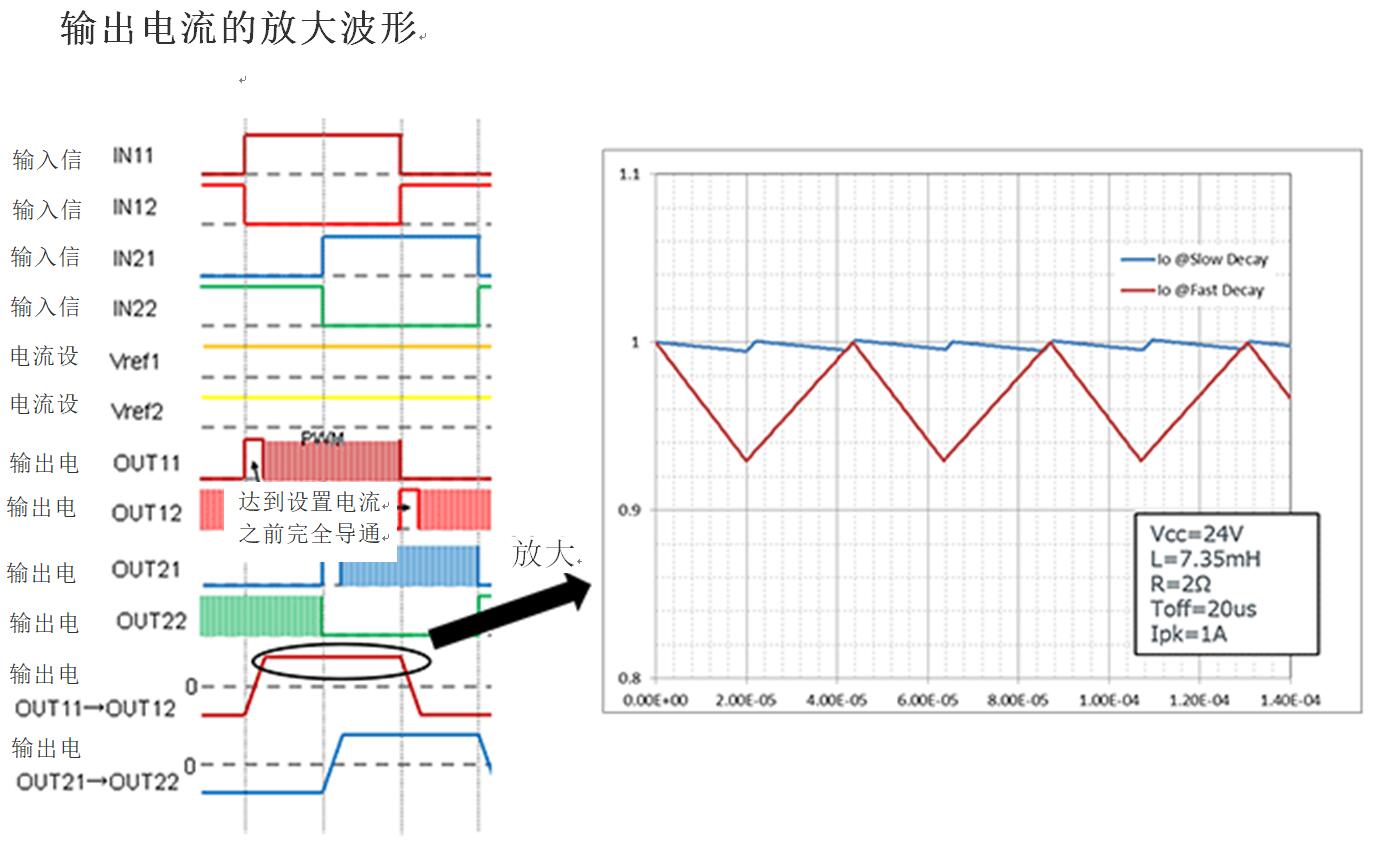
對應的電機相電流波形是先驅動Drive階段上升,如圖4右示,當相電流上升到預設的ITRIP閾值或以上時,就進入續流階段。
若經過tBLANK時間后相電流已經到達(或超過)ITRIP閾值時,就沒有后續的Drive階段而直接進入續流階段,如圖4波形圖的第二個PWM周期。所以tBLANK決定了PWM驅動信號最小的ON時間。
綜上,慢衰減模式主要是通過下橋臂的兩個驅動管來續流。
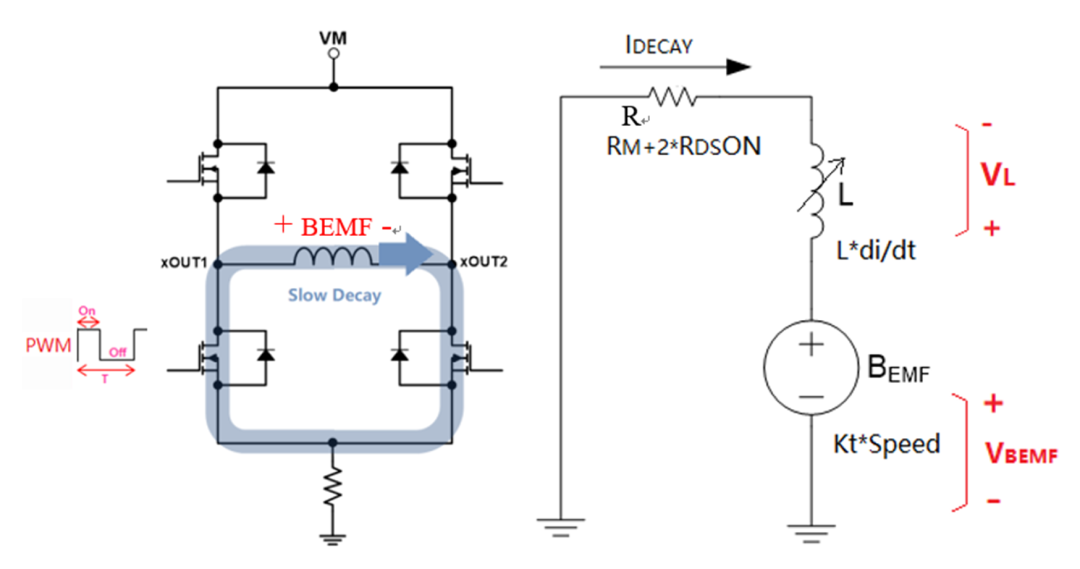
圖5 慢衰減等效電路
在該階段,也就是PWM周期的OFF時間段內,電機轉速變化不大,即反電動勢變化不大。從圖5等效電路來看,相當于VM接地,此時電感電壓:

但極性反向,VL值不會超過VM(驅動Drive階段VM=I*R+VBEMF+VL,即I*R+VBEMF=VM-VL>0),所以IDECAY下降斜率相對緩慢。
2?快衰減 Fast Decay
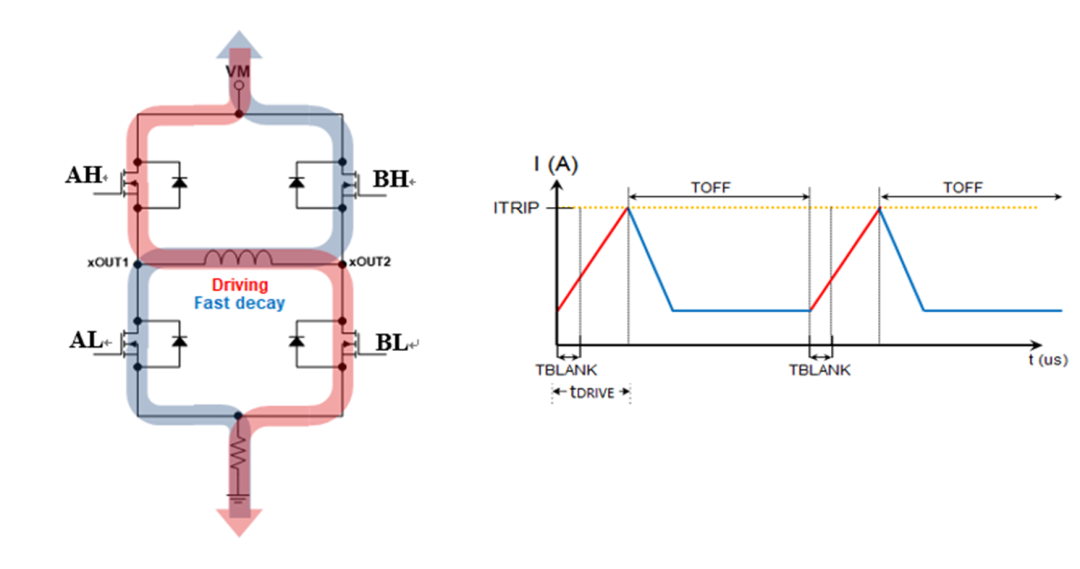
圖6 快衰減 Fast Decay
先正常驅動Drive階段,如圖6紅色電流方向(AH、BL打開),然后關掉AH、BL,并打開斜對稱的BH、AL兩個驅動管,電流繼續從左往右經過線圈、從地端到電源VM端快衰減,如圖中藍色電流方向。
對應的相電流波形如圖6右所示,是先驅動Drive階段,然后快衰減直到零,并保持(如把全橋驅動管都關掉),不會出現反向電流。圖中只是舉例示意,并不是指快衰減都能在續流時間內到零。
綜上,快衰減模式主要是通過斜對角的兩個驅動管來續流。
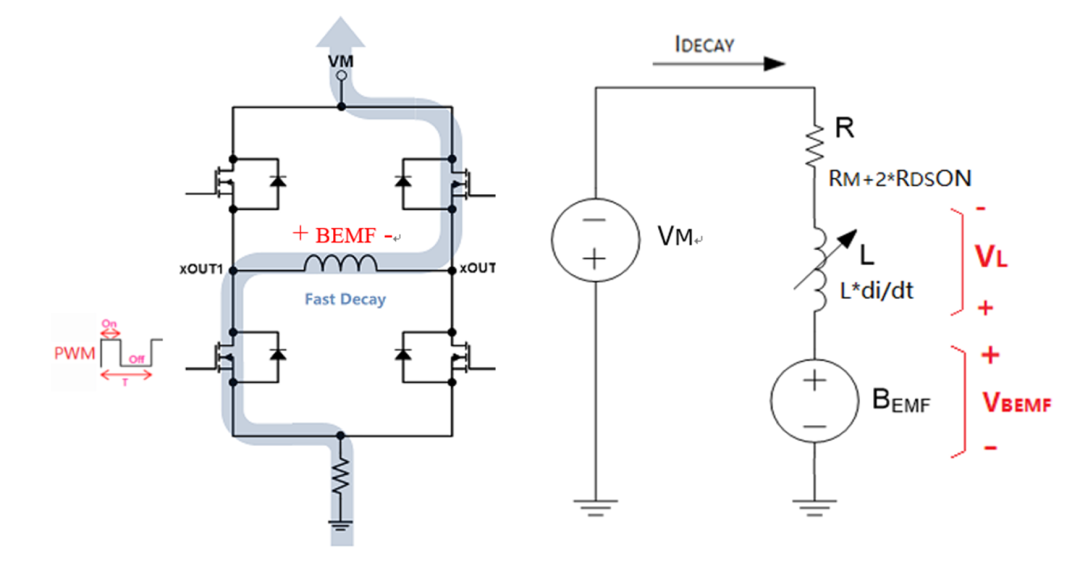
圖7 快衰減等效電路
對于快衰減續流階段等效電路,如圖7所示。需要注意,此時VM反向加載于電機,快衰減階段的電感電壓:

相比于慢衰減階段的電感電壓(I*R+VBEMF)大很多,所以IDECAY下降速度最快,也就是稱之為“快” 衰減。可以理解的是快衰減較適合大電感電機,而慢衰減較適合小電感電機。
3混合衰減 Mixed Decay
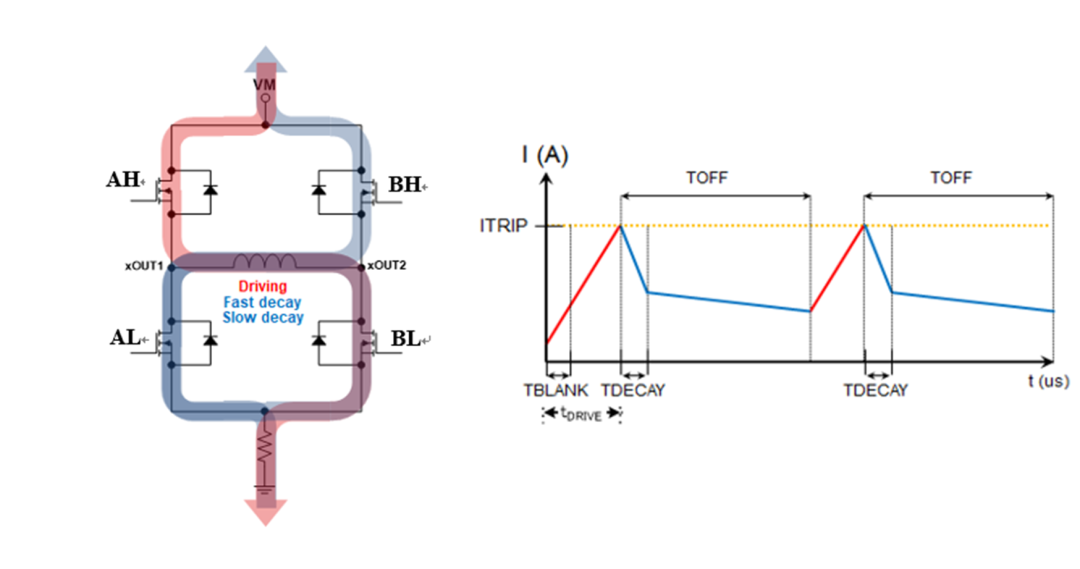
圖8 混合衰減 Mixed Decay
先正常驅動Drive階段,如圖8紅色電流方向(AH、BL打開),然后關掉AH、BL,并打開斜對稱的BH、AL兩個驅動管快衰減,經過一段時間TDECAY后,關掉BH并打開BL(此時AL保持打開),電流繼續從左往右經過線圈順時針的慢衰減。對應的相電流波形是先驅動Drive階段,然后先快衰減,持續TDECAY時間,接著切換到慢衰減。
混合衰減模式下相電流的紋波介于快衰減和慢衰減之間。TDECAY時間可根據電機及應用場景來設置調整。
綜上,統籌考慮tBLANK、tDRIVE、tOFF、TDECAY及PWM周期等時間的控制,來確保電機相電流有效地、及時地控制到當前設定的ITRIP閾值,以達到精確的快速響應的電流環控制。
相對來說,慢衰減較為適合相電流上升期,快衰減較為適合相電流下降期,而混合衰減介于兩者之間。
表1 續流各模式對比 ?
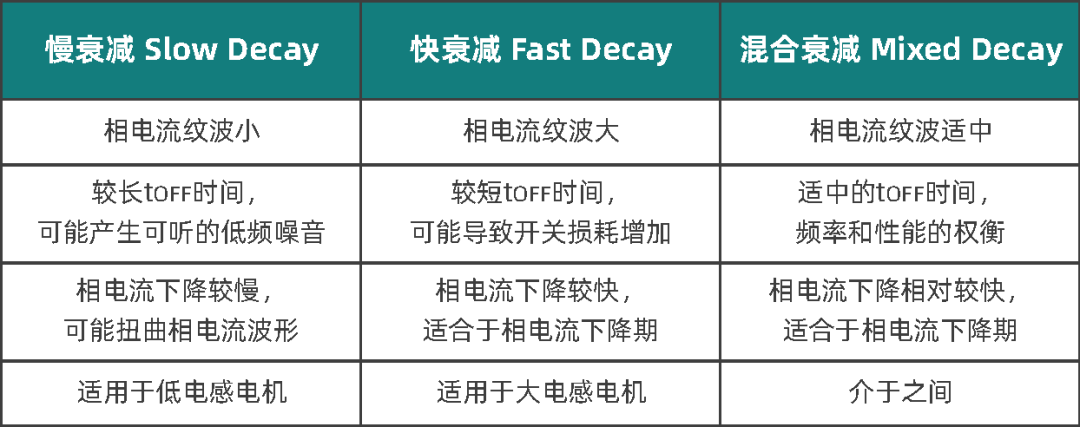
表1是三種衰減模式的優缺點對比。對于相對復雜的控制,可以在相電流上升和下降期,采用不同衰減模式;而對于更復雜的控制,可以進一步控制PWM周期、tBLANK、tDRIVE、tOFF等時間來達到最優化效果。
?慢衰減就是電機剎車Brake嗎?
經常有工程師混淆了慢衰減和剎車兩個概念,這里詳細解釋下區別。續流是PWM的tOFF時間段,時間非常短,比如芯片PN7781采用固定20us,而電機剎車的時間相對會長很多,從毫秒到秒。兩者時間級上完全不一樣。
在續流階段時間內,電機轉速變化非常小,基本可以忽略反電動勢VBEMF的變化。當電機從正常驅動Drive階段到把全橋驅動管全部關掉OFF,如圖9所示,此時若考慮MOS體二極管則繼續異步衰減,續流結束后電機就是完全開路狀態,反電動勢能量無處釋放,只有電機本身的摩擦阻力讓電機緩慢停下來。
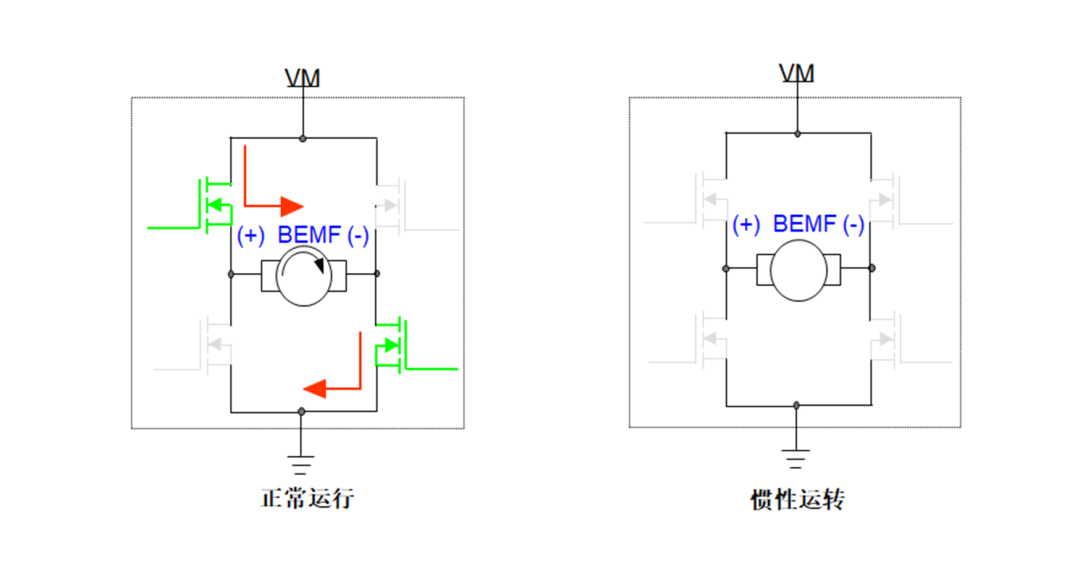
圖9 慣性運轉 Coasting
而對于剎車,如圖10所示,電機從正常運行狀態切換到只打開下橋臂驅動管并保持住,在剎車前(驅動階段結束)時刻:
此時轉速最大則VBEMF最大,電感電壓忽略,電機相電流近似于:

切換后,也就是和慢衰減一樣的電路,電機相電流先慢續流直到零。然后電機自身的反電動勢通過低邊驅動管形成回路,相當于發電機,電流反向,如圖10中間的紅色剎車電流。
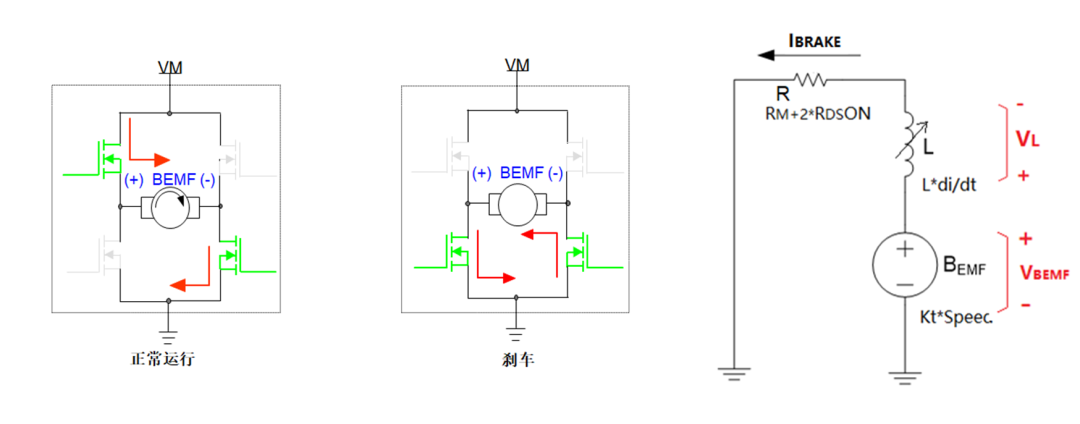
圖10? 剎車 Braking
對于剎車過程的等效電路分析,如圖10右所示:

電流IBRAKE從0開始迅速增大到最大,VL迅速從此刻(VL=VBEMF)降低到0,但是在這個短時間段內,電機轉速變化很小,所以反電動勢略微降低,VBEMF仍然較大。此時刻(VL降到0時)剎車電流最大:

相比較于剎車前時刻的相電流:
IBRAKE可能是幾倍于IDRIVE,這就是我們常見的剎車電流尖峰非常大,極性相反。特別是在高轉速下的急剎車可能會觸發驅動芯片過流OCP保護。
以上就是電機續流控制的詳細說明及各衰減模式的差異理解。在市面上能真正發揮續流衰減模式性能的驅動芯片較少,而芯朋微最新推出的高性能步進電機驅動產品系列PN7781就詮釋了如何靈活優化續流的控制。
高性能步進電機驅動--PN7781
PN7781是一款集成電流檢測(無需外部功率電阻采樣,節省面積和成本)、帶1/16細分(細分可選)的高性能步進電機驅動芯片,適用電機電壓高達37V,電流支持1.5A峰值,內部帶細分控制邏輯,只需要簡單STEP/DIR控制接口,并集成全面復雜的保護功能。
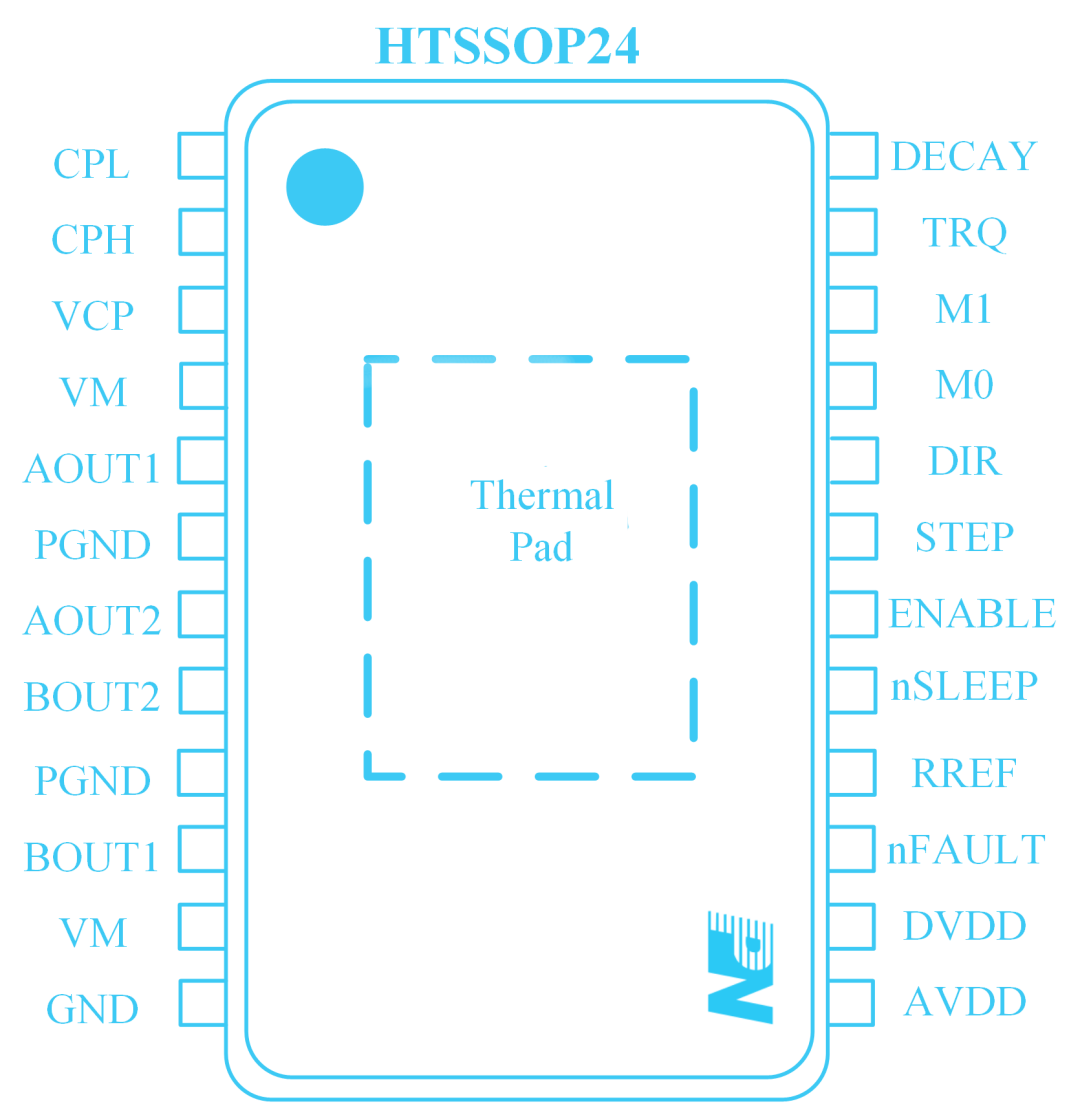
PN7781TG-A1
芯片特征
●?步進電機集成驅動
寬電壓范圍:8V~37V
每個H橋電流:1A持續電流(1.5A峰值)
低導通電阻:0.86Ω(高邊+低邊)
●?STEP/DIR輸入接口,控制簡單
●?六種步進模式,最高支持1/16細分
●?慢速衰減和混合衰減模式運行中可調整(四種選擇)
●?集成電流檢測功能:無需檢測電阻
●?低睡眠電流:IVCC_SLEEP <20uA
●?異常保護功能:電源欠壓保護(UVLO),電荷泵欠壓(CPUV)過溫保護(OTP),過流保護(OCP),故障指示引腳(nFAULT)
PN7781非常適用于辦公設備(如打印機、掃描儀)、3D打印、安防監控IPC和醫療設備等步進電機。
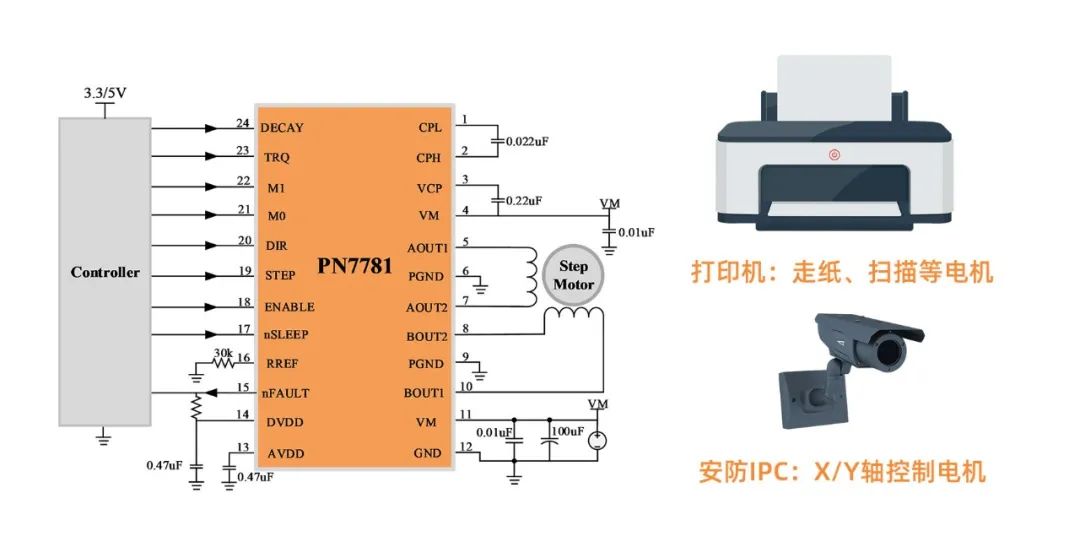
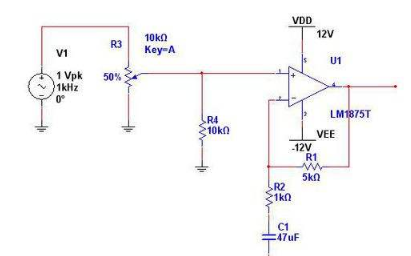
圖11 PN7781典型應用
其中PN7781一大特色功能是續流多種衰減模式及靈活設置(運行中可實時調整),可以適配及優化驅動不同參數的步進電機,以達到最佳的運行性能。?
表2 PN7781 Decay管腳設置電壓
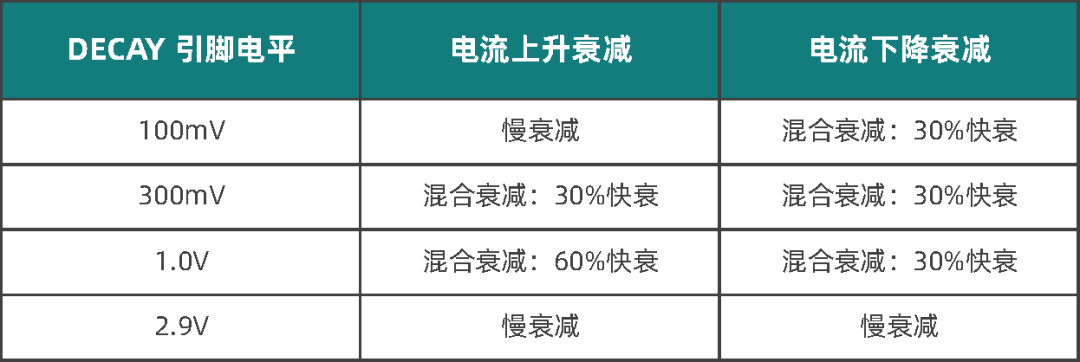
如表2,PN7781通過四態電平DECAY管腳設置電壓范圍,來選擇續流衰減模式。
其中慢衰/混合衰減模式是在電流上升階段使用慢衰減,在電流下降階段使用混合衰減。用戶可根據實際使用的電機參數,以及實際測試的平穩性及震動、噪音等水平,來設置匹配最優的衰減模式。
同時,如上文談到的tBLANK消隱時間,PN7781采用先進的自適應消隱時間。
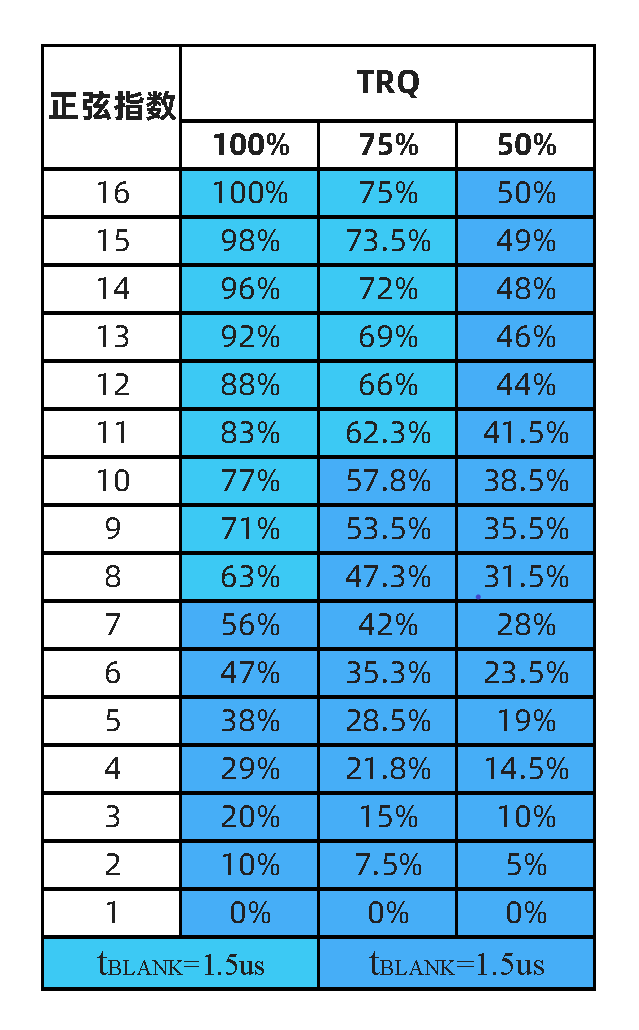
圖12 PN7781消隱時間
如圖12所示,基于正弦指數和TRQ設置自動匹配tBLANK時間,通過在小電流臺階上減少消隱時間,有效改善電流波形過零點附近的失真。
綜上,PN7781采用自適應的消隱時間配合續流多種衰減模式的靈活控制,可以適配各參數的步進電機,很好地平衡步進電機平滑穩定性、噪音和震動,明顯提升終端產品的運動(機械傳動)性能。
表3 Chipown步進電機驅動產品系列
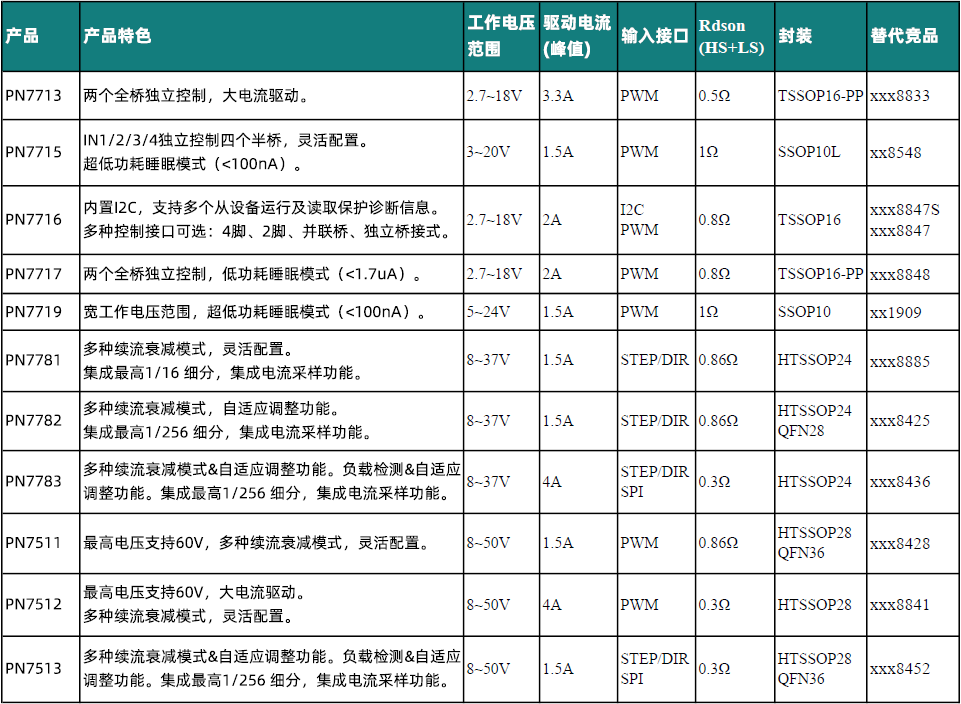
此外,芯朋步進電機系列產品豐富,從低壓到中高壓,從性價比的簡單控制到高性能步進電機驅動齊全,如表3所示。
產品基本覆蓋各類型應用所需步進電機,用戶可以按需要選擇合適方案(其中集成細分是指芯片內部集成細分控制的邏輯,只需要脈沖輸入STEP腳控制即可。而對普通步進電機驅動產品,也可以通過PWM輸入的軟件方法實現細分控制)。
審核編輯:湯梓紅











 工商網監
工商網監
評論