 電子發(fā)燒友App
電子發(fā)燒友App


1. 基本原理
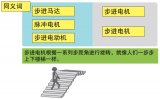
步進電機是一種用電脈沖進行控制,將電脈沖(數(shù)字信號)轉(zhuǎn)化為角位移的執(zhí)行機構(gòu)。
通常步進電機的轉(zhuǎn)子為永磁體,當(dāng)電流流過定子繞組時,定子繞組產(chǎn)生一矢量磁場。該磁場會帶動轉(zhuǎn)子旋轉(zhuǎn)一角度,使得轉(zhuǎn)子的一對磁場方向與定子的磁場方向一致。當(dāng)定子的矢量磁場旋轉(zhuǎn)一個角度。轉(zhuǎn)子也隨著該磁場轉(zhuǎn)一個角度。當(dāng)步進驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進電機按設(shè)定的方向轉(zhuǎn)動一個固定的角度 (稱為"步距角"),它的旋轉(zhuǎn)是以固定的角度一步一步運行的。
步進電機輸出的角位移與輸入的脈沖數(shù)成正比,轉(zhuǎn)速與脈沖頻率成正比,改變繞組通電的順序,電機就會反轉(zhuǎn)。因此:
可以通過控制脈沖個數(shù)來控制角位移量,從而達到準確定位的目的;
可以通過控制脈沖頻率來控制電機轉(zhuǎn)動的速度和加速度,從而達到調(diào)速的目的;
可以通過控制繞組通電順序,達到控制電機正反轉(zhuǎn)的目的。
步進電機可以作為一種控制用的特種電機,利用其沒有積累誤差 的特點,廣泛應(yīng)用于各種開環(huán)控制。
2. 步進電機分類
2.1 按照定子相數(shù)進行分類
x相即有x個繞組。
2.1.1 單相步進電機
單相步進電機的電磁轉(zhuǎn)矩只在定子電流變換時產(chǎn)生,其平均轉(zhuǎn)矩比兩相以上的電機小得多,響應(yīng)脈沖頻率也在100pps(pulse per second)以下,故其用途受到很大限制,只能在響應(yīng)脈沖頻率比較低的輕載下運行。例如時鐘、車用計時器、水表計數(shù)器。
2.1.2 兩相步進電機
上圖所示,定子磁極數(shù)為4極,相當(dāng)于一個繞組占兩個極。
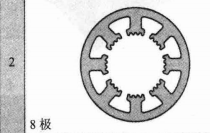
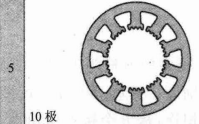
上圖所示,定子磁極數(shù)為8極,相當(dāng)于一個繞組占四個極。
2.1.3 三相步進電機
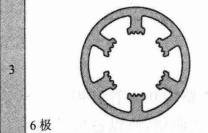
三相步進電機定子線圈的主極數(shù)為三的倍數(shù),故三相步進電機的定子主極數(shù)為3、6、9、12等。
2.1.4 四相步進電機
四相步進電機的驅(qū)動器結(jié)構(gòu)復(fù)雜,成本高,只有特殊用途才使用。
2.1.5 五相步進電機
2.2 按照轉(zhuǎn)子結(jié)構(gòu)進行分類
2.2.1 永磁式步進電機(Permanent Magnet,PM)
轉(zhuǎn)子由永磁材料構(gòu)成。PM型轉(zhuǎn)子為內(nèi)轉(zhuǎn)子型,圓柱形轉(zhuǎn)子的外表面分布N、S極(外表面無齒)。
單相永磁式步進電機
兩相永磁式步進電機
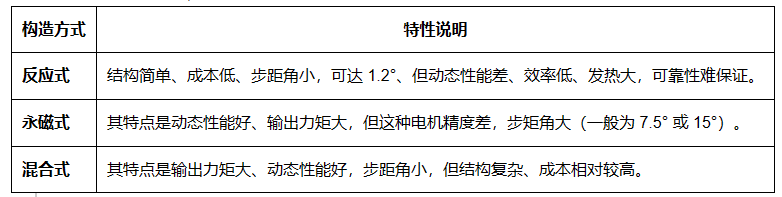
特點:永磁式步進電機輸出力矩大,動態(tài)性能好,但步距角大。
2.2.2 反應(yīng)式步進電機(Variable Reluctance,VR)
轉(zhuǎn)子由硅鋼片或電工純鐵棒等導(dǎo)磁體構(gòu)成,轉(zhuǎn)子外表面為多齒結(jié)構(gòu)(轉(zhuǎn)子的齒槽在轉(zhuǎn)動時產(chǎn)生磁阻變化,故又稱為變磁阻電機)。
當(dāng)定子線圈通電時,定子磁極磁化,吸引轉(zhuǎn)子齒而產(chǎn)生轉(zhuǎn)矩,使其移動一步。
與永磁電機產(chǎn)生磁性吸引轉(zhuǎn)矩和排斥轉(zhuǎn)矩相比,反應(yīng)式步進電機只產(chǎn)生吸引轉(zhuǎn)矩。
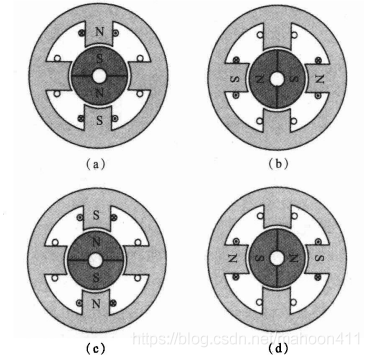
下圖為反應(yīng)式步進電機的結(jié)構(gòu)。圖中定子上均勻分布了12個磁極,每個磁極相距30°;相差90°的四個線圈組成一相繞組。轉(zhuǎn)子齒數(shù)為8,當(dāng)一相繞組通電時,其定子極吸引轉(zhuǎn)子齒,使氣隙磁阻最小,達到靜止位置。
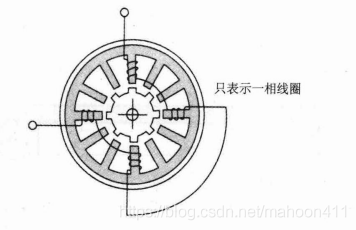
接下來講解其工作原理:
第一步,為第1相線圈的簡化圖,剖面線表示第1相定子激磁,轉(zhuǎn)子被第1相定子磁極吸引,轉(zhuǎn)子齒轉(zhuǎn)到定子磁極之下。
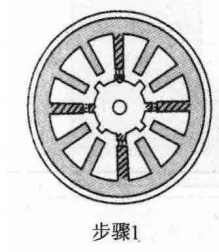
第二步,第1相繞組電流關(guān)閉,第2相繞組通電,轉(zhuǎn)子逆時針旋轉(zhuǎn)一步(15°=齒節(jié)距除以定子相數(shù)),旋轉(zhuǎn)至第2相定子磁極之下停止。

第三步,同樣給第3相繞組通電,轉(zhuǎn)子同樣逆時針旋轉(zhuǎn)15°,與定子第3相磁極相對位置停止。
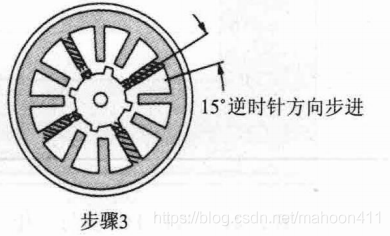
下一刻,第1相繞組又通電,又由步驟3的轉(zhuǎn)子位置逆時針旋轉(zhuǎn)15°到第1相定子磁極下,恢復(fù)到第一步狀態(tài)。
特點:結(jié)構(gòu)簡單,生產(chǎn)成本低,步距角小。但因反應(yīng)式步進電機不使用永久磁鐵,其定轉(zhuǎn)子磁場強度與激磁電流成正比,要想增大磁場強度,就需要很大的激磁電流,因此溫升很高,散熱片也很大,并且動態(tài)性能差,效率低,可靠性差。
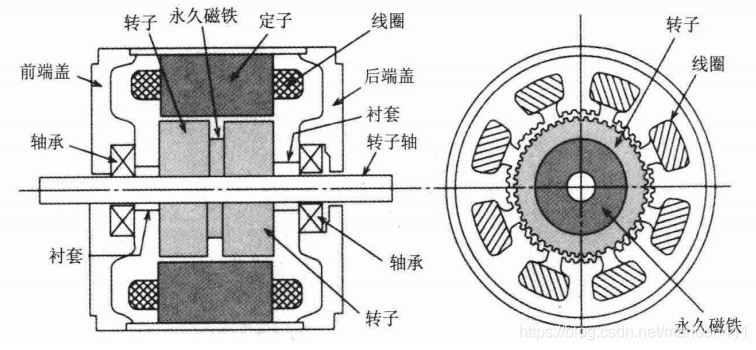
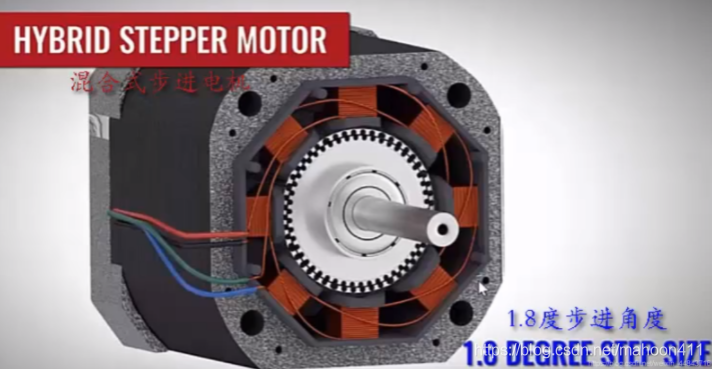
2.2.3 混合式步進電機(Hybrid Stepping,HS)
混合式步進電機有兩相、三相、五相式,本節(jié)以兩相混合式步進電機進行說明。
混合式步進電機的名稱由其轉(zhuǎn)子結(jié)構(gòu)得來,其轉(zhuǎn)子是PM型轉(zhuǎn)子與VR型轉(zhuǎn)子的復(fù)合體。
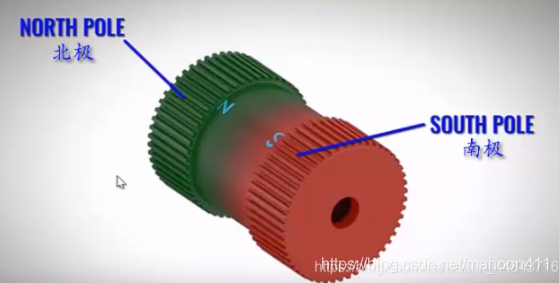
混合式步進電機的轉(zhuǎn)子結(jié)構(gòu)為兩個導(dǎo)磁圓盤中間夾著一個永磁圓柱體軸向串在一起,兩個導(dǎo)磁圓盤的外圓齒節(jié)距相同,與前述的VR型轉(zhuǎn)子結(jié)構(gòu)相同,其兩個圓盤的齒錯開1/2齒距安裝,轉(zhuǎn)子圓柱永磁體軸向充磁,一段為N,另一端為S。
這種電機轉(zhuǎn)子與前面敘述的PM型轉(zhuǎn)子從結(jié)構(gòu)來看,PM型轉(zhuǎn)子的N極與S極分布于轉(zhuǎn)子外表面,要提高分辨率,就要提高極對數(shù),通常20mm直徑的轉(zhuǎn)子可配置24極,如再增加極數(shù),會增大漏磁,降低電磁轉(zhuǎn)矩;而混合式步進電機的轉(zhuǎn)子N極與S極分布在兩個不同的軟磁圓盤上,因此可以增加轉(zhuǎn)子極數(shù),從而提高分辨率,20mm的直徑的轉(zhuǎn)子可配置100極,并且磁極磁化方向為軸向,N極與S極在裝配后兩極磁化,充磁簡單。
與轉(zhuǎn)子齒對應(yīng)的定子極,主極內(nèi)徑有與轉(zhuǎn)子齒節(jié)距相同的小齒,與轉(zhuǎn)子齒的磁通在氣隙內(nèi)相互作用,能產(chǎn)生電磁轉(zhuǎn)矩。
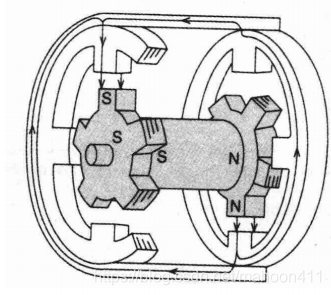
下圖為兩相混合式步進電機的磁路。
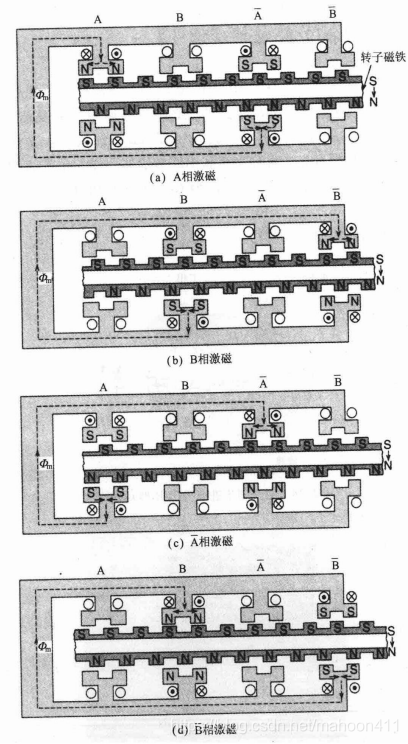
下圖為兩相混合式步進電機的工作原理圖。
接下來,以一個實物模型來詳細講解混合式步進電機的工作原理。
下圖是一個雙極性四線兩相混合式的步進電機。
注:在這里可以先不用管什么是雙極性,接著往下看就行。
注:“四線” 就是說明步進電機有四個接線口。
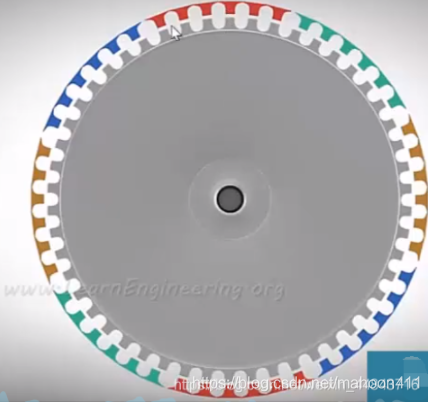
下圖為上述步進電機的轉(zhuǎn)子結(jié)構(gòu)。
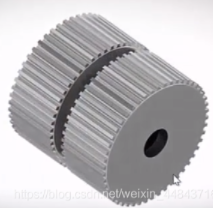
轉(zhuǎn)子內(nèi)部如下圖所示,由圖可知,里面由永磁鐵,齒輪帽構(gòu)成。
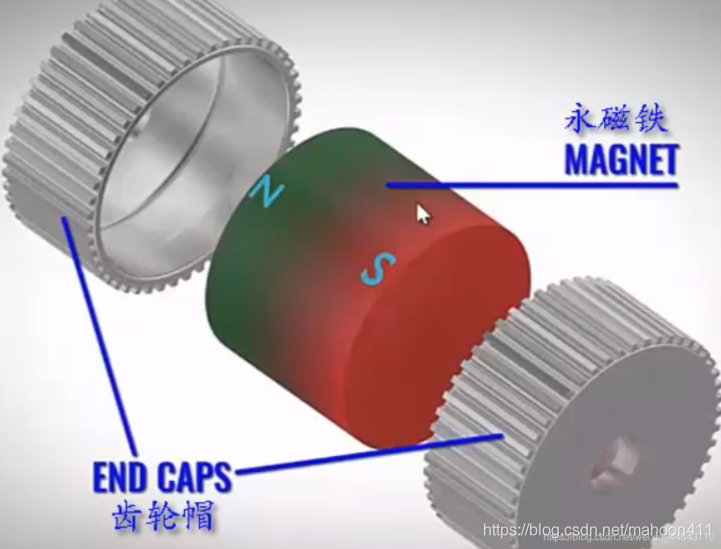
齒輪帽本身不帶磁性,但是和永磁鐵挨一起了,就有了磁性。
看完了轉(zhuǎn)子,我們來分析定子。轉(zhuǎn)子有50個齒,定子只有48個齒。
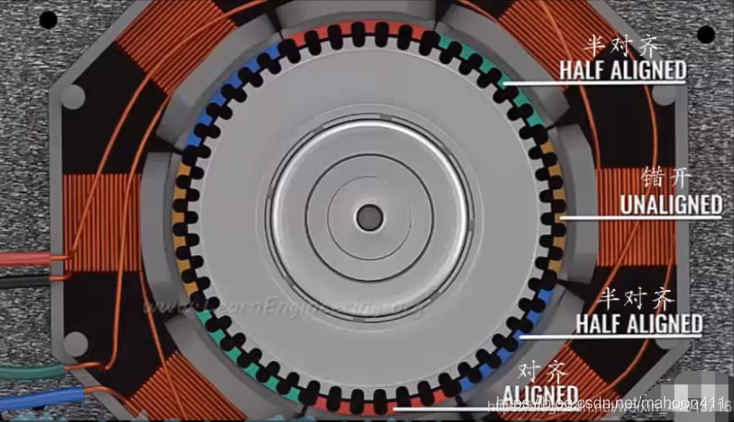
從下圖可以看到它其實只有兩個獨立通電的線圈,也就是說這個步進電機是兩相步進電機。
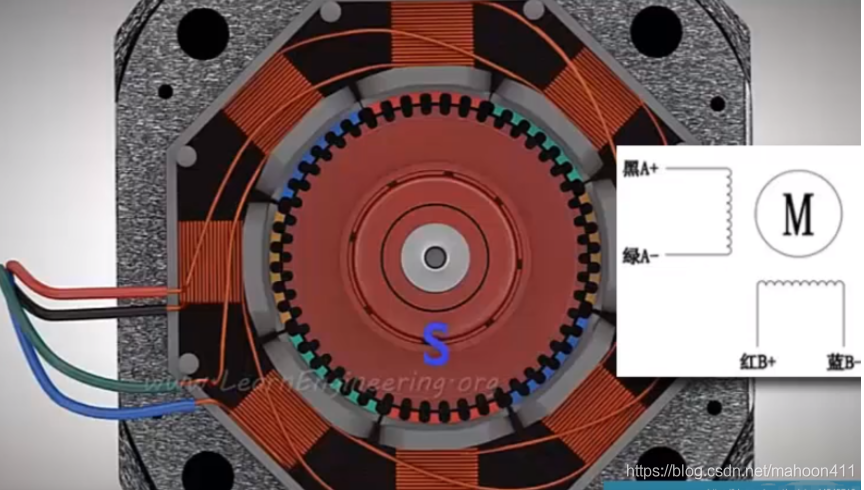
我們將兩個線圈進行標識為A和B,如下圖:
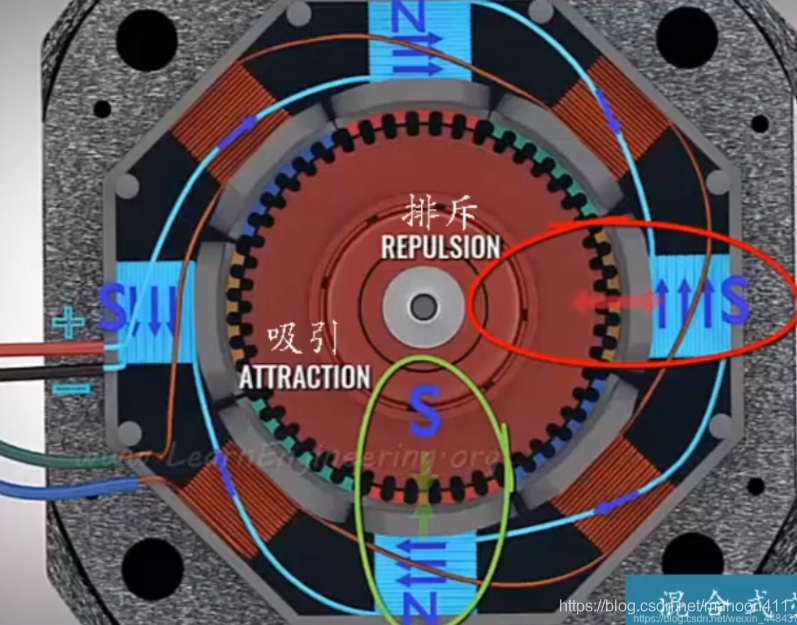
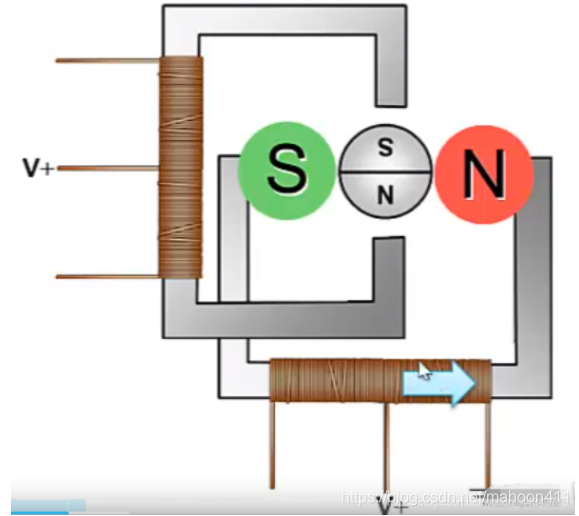
這是給線圈A通電,如下圖:轉(zhuǎn)子齒是S極,線圈會產(chǎn)生磁場,由于異性相吸,所以紅色的定子齒會和轉(zhuǎn)子齒相吸引,由于同性互斥,所以黃色的齒會排斥轉(zhuǎn)子齒。
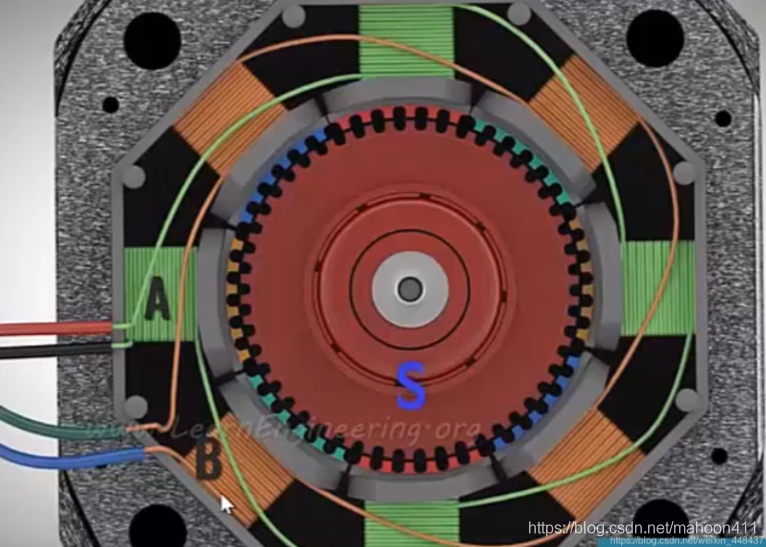
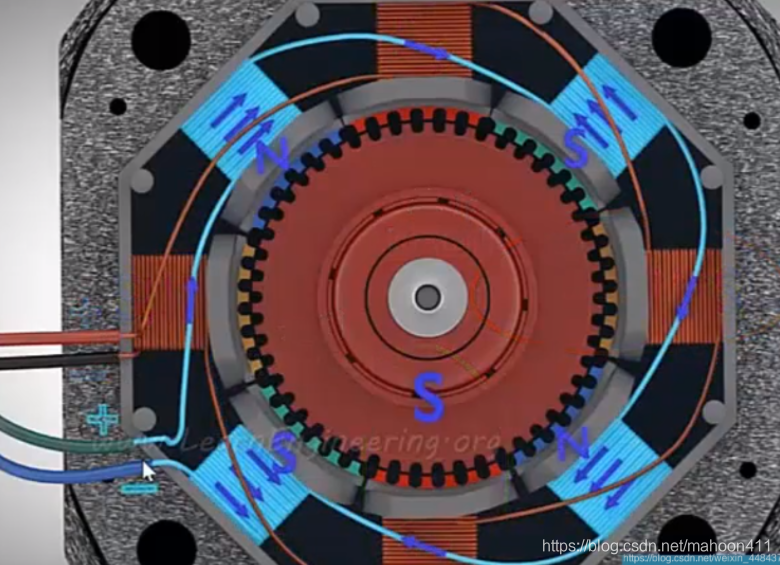
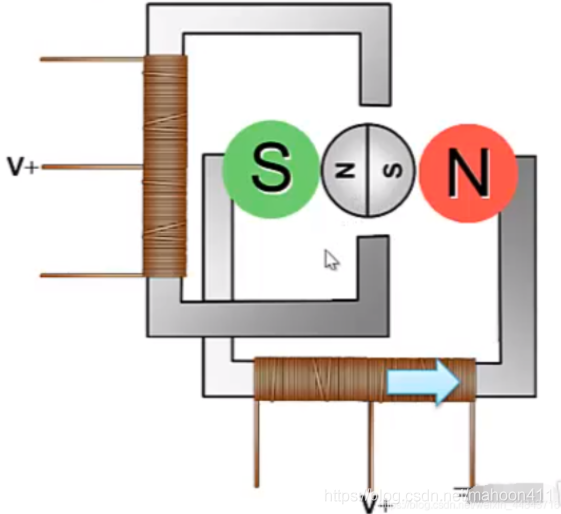
當(dāng)給線圈A斷電,線圈B通電后,如下圖:
磁場發(fā)生了變化,定子會發(fā)生微小的轉(zhuǎn)動,會轉(zhuǎn)動1.8度,如下圖:轉(zhuǎn)子齒是S極,線圈會產(chǎn)生磁場,由于異性相吸,所以藍色的定子齒會和轉(zhuǎn)子齒相吸引,由于同性互斥,所以綠色的齒會排斥轉(zhuǎn)子齒。
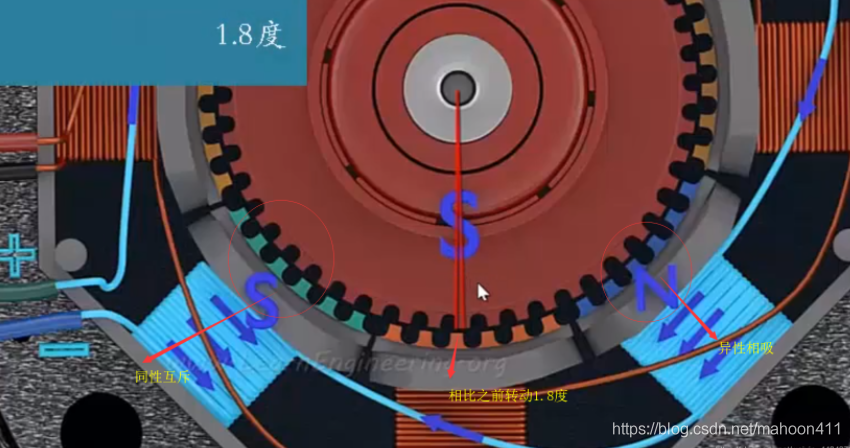
值得注意的是,這是半步進的驅(qū)動方式,走一步是1.8度,如果是兩個線圈同時都通電的話,就是全步進驅(qū)動方式了,走一步是0.9度。這樣控制更加精確。
特點:步距角小、輸出力矩大、動態(tài)性能好。但結(jié)構(gòu)復(fù)雜,成本較高。
2.2 按照驅(qū)動方式(雙極驅(qū)動/單極驅(qū)動)分類
電機按照驅(qū)動方式也分單極性步進電機和雙極性步進電機。
簡單來說,如果步進電機的線圈是可以雙向?qū)щ姷模敲催@個步進電機就是雙極性的,相反,如果步進電機的線圈是只允許單向?qū)щ姷模敲催@個步進電機就是單極性的。
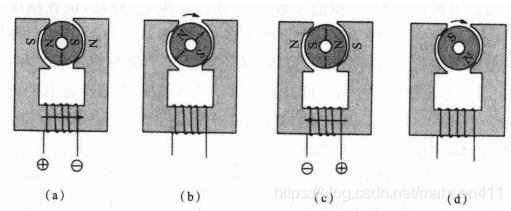
下圖中的線圈是可以雙向?qū)щ姷模允请p極性步進電機。
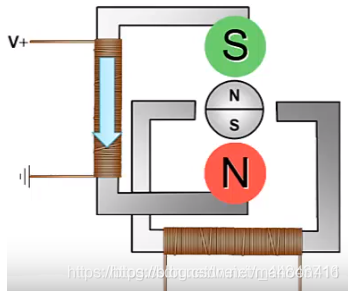
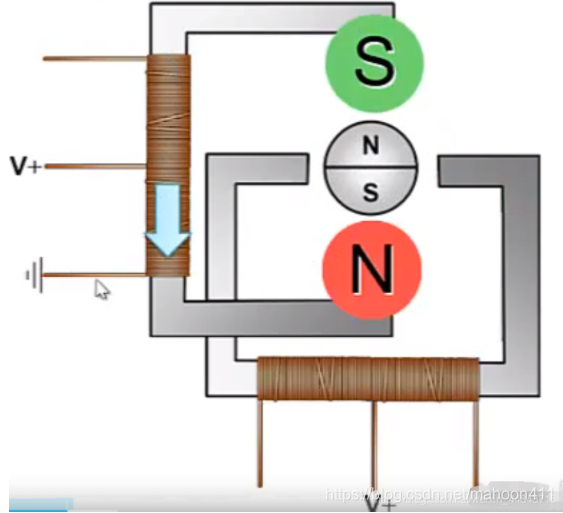
下圖的線圈中間導(dǎo)線總是接電源正極(也有總是接電源負極的),通過改變電源接地的位置來改變電磁場,從而改變轉(zhuǎn)子轉(zhuǎn)動角度。
通電后受到電磁場得作用,轉(zhuǎn)子移動。
此時這個線圈斷電,另一個線圈通電后,轉(zhuǎn)子又會發(fā)生改變。
下圖為單極和雙極的兩相驅(qū)動電路及其電壓波形,兩相式通常用兩相激磁方式(通常兩個相同時加激磁電壓)。
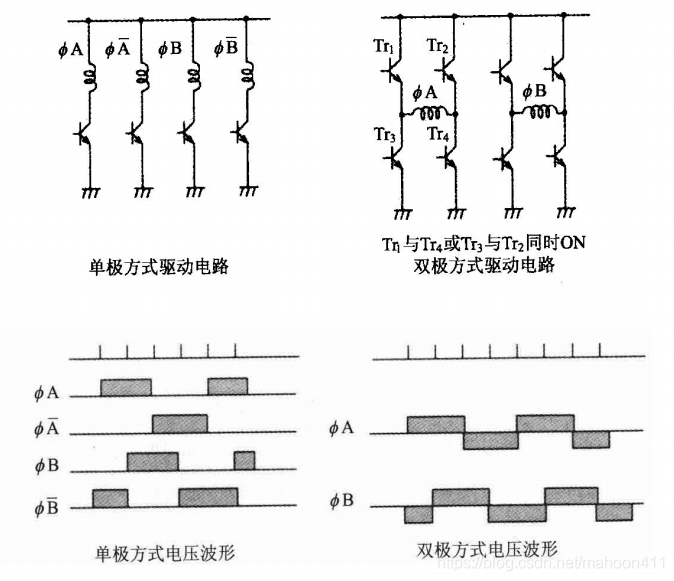
比較單極式與雙極式的驅(qū)動電路,單極式驅(qū)動電路用4個功率管,線圈電流在線圈內(nèi)單一方向流動。雙極式驅(qū)動電路使用功率管的個數(shù)為單極式的兩倍,需要8個,線圈電流在線圈內(nèi)正反向交替流過,Tr1與Tr4或Tr3與Tr2同時且交替導(dǎo)通,Tr1與Tr3即使短時同時導(dǎo)通,也會造成電源短路,產(chǎn)生很大的電流,因此有必要附加防止短路電路。雙極式驅(qū)動電路比單極式驅(qū)動電路復(fù)雜很多。
下圖為單極式步進電機及其線圈不使用中間抽頭,兩個線圈串聯(lián)做雙極式驅(qū)動的單極式與雙極式的特性曲線。且均采用同一恒電流驅(qū)動方式。
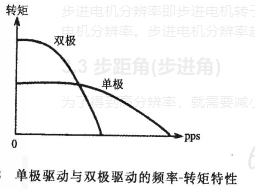
由此可看出,一般低速大轉(zhuǎn)矩的負載使用雙極式驅(qū)動,而高速驅(qū)動的負載使用單極式驅(qū)動。
低速時雙極式的輸出轉(zhuǎn)矩比單極式約大50%。高速時,因雙極式匝數(shù)多的原因,電感變大,使電流減小,從而轉(zhuǎn)矩減小。
故針對負載的大小、使用速度、加速時間等,有必要合理選擇單極式或雙極式的驅(qū)動應(yīng)用場合。
3. 基本參數(shù)
3.1 相數(shù)
指定子相數(shù),即可獨立通電的定子電磁圈數(shù),x相即有x個繞組。
3.2 分辨率
步進電機分辨率即步進電機轉(zhuǎn)子轉(zhuǎn)一圈(360°)所走的步數(shù),若已知步進電機步距角,可使用360°除以步距角來計算步進電機分辨率。步進電機分辨率越高,位置精度越高。
3.3 步距角(步進角)
為了得到高分辨率,就需要減小步距角。步距角的公式如下所示:

其中,θs為步進電機步距角;P為定子相數(shù);Nr為轉(zhuǎn)子極對數(shù)(即轉(zhuǎn)子極數(shù)除以2)。
注:在反應(yīng)式步進電機中,步距角不能用上式計算,而是上式的兩倍。即分辨率與永磁式及混合式相比,雖然轉(zhuǎn)子齒數(shù)相同,但反應(yīng)式只有一半。
注:在混合式步進電機中,Nr為轉(zhuǎn)子齒數(shù)。
上述公式的物理意義為:轉(zhuǎn)子旋轉(zhuǎn)一周的機械角度為360°,如用極數(shù)2Nr去除,相當(dāng)于一個極所占的機械角度為180°/Nr。也就是說,一個極的機械角度用定子相數(shù)去分割,就得到了步距角,如下圖的HS型步進電機所示。
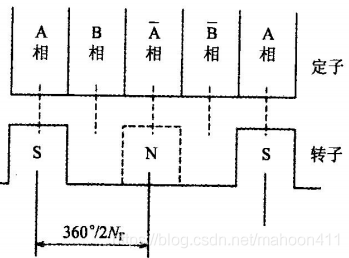
又由上式可知,要提高步進電機的分辨率,就要增加轉(zhuǎn)子極對數(shù)Nr或增加定子相數(shù)P。而增加Nr收到機械加工的限制,所以要制造高分辨率的步進電機需要兩種方法并用。
3.4 定位轉(zhuǎn)矩(DETENT TORQUE)
是指步進電機沒有通電的情況下,定子鎖住轉(zhuǎn)子的力矩。DETENT TORQUE在國內(nèi)沒有統(tǒng)一的翻譯方式,暫且翻譯為定位轉(zhuǎn)矩。
由于反應(yīng)式步進電機的轉(zhuǎn)子不是永磁材料,所以反應(yīng)式步進電機沒有定位轉(zhuǎn)矩。
3.5 保持轉(zhuǎn)矩(最大靜力矩)
指步進電機通電但沒有轉(zhuǎn)動時,定子鎖住轉(zhuǎn)子的力矩。
它是步進電機最重要的參數(shù)之一,通常步進電機在低速時的力矩接近保持轉(zhuǎn)矩。由于步進電機的輸出力矩隨速度的增大而不斷衰減,輸出功率也隨速度的增大而變化,所以保持轉(zhuǎn)矩就成為了衡量步進電機最重要的參數(shù)之一。比如,當(dāng)人們說2Nm的步進電機,在沒有特殊說明的情況下是指保持轉(zhuǎn)矩為2Nm的步進電機。
一般,最大靜轉(zhuǎn)矩較大的電機,可以帶動較大的負載轉(zhuǎn)矩,負載轉(zhuǎn)矩和最大靜轉(zhuǎn)矩的比值通常取為0.3~0.5,即TL=(0.3~0.5)Tjmax。
按最大靜轉(zhuǎn)矩的值可以把步進電機分為伺服步進電機和功率步進電機,前者輸出力矩較小,有時需要經(jīng)過液壓力矩放大器或伺服功率放大系統(tǒng)放大后再去帶動負載,而功率步進電機的最大靜轉(zhuǎn)矩一般大于0.05Nm,它不需要力矩放大裝置就能直接帶動負載運動,這不僅大大簡化了系統(tǒng),而且提高了傳動精度。
3.6 繞線類型
也可理解為驅(qū)動方式,有雙極性和單極性。
3.7 額定電流
指電機可以長期連續(xù)工作的電流。
3.8 額定電壓
指電機可以長期連續(xù)工作的電壓。
3.9 基座尺寸
包括NEMA10、NEMA11、NEMA14、NEMA16、NEMA17。
3.10 矩頻特性
電動機的性能在很大程度上不僅僅取決于矩角特性的形狀,而且取決于矩頻特性,首先需要根據(jù)計算出的脈沖速度和運行需要的轉(zhuǎn)矩,作出速度一轉(zhuǎn)矩曲線,將該曲線與步進電機生產(chǎn)廠家的矩頻特性曲線比較,若計算曲線在產(chǎn)品特性之下,則可選擇相應(yīng)的電機和驅(qū)動器,步進電機的動態(tài)轉(zhuǎn)矩與驅(qū)動器的形式有很大的關(guān)系,因而選用時必須了解給出的性能指標是在何種型式的電源及驅(qū)動下測定的。
3.11 速度力矩曲線
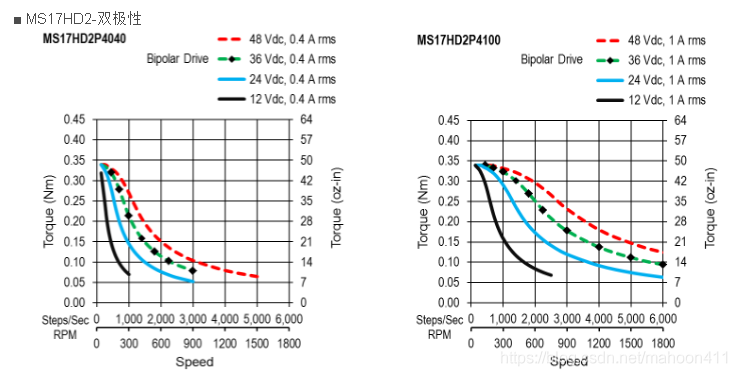
如上圖所示。為什么步進電機的力矩會隨轉(zhuǎn)速的升高而下降?
當(dāng)步進電機轉(zhuǎn)動時,電機各相繞組的電感將形成一個反向電動勢;頻率越高,反電動勢越大,在它的作用下,電機相電流隨頻率(或速度)的增大而減小,從而導(dǎo)致力矩下降。
3.12 空載啟動頻率
空載啟動頻率,即步進電機在空載情況下能夠正常啟動的脈沖頻率。如果脈沖頻率高于該值,電機不能正常啟動,可能發(fā)生丟步或堵轉(zhuǎn)。
在有負載的情況下,啟動頻率應(yīng)更低。如果要使電機達到高速轉(zhuǎn)動,脈沖頻率應(yīng)該有加速過程,即啟動頻率較低,然后按一定加速度升到所希望的高頻(電機轉(zhuǎn)速從低速升到高速)。
4. 應(yīng)用場景
打印機、傳真機、監(jiān)視攝像機、照明裝置、機器人、醫(yī)療器械等。
編輯:黃飛
?
















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論