 電子發燒友App
電子發燒友App


無刷直流 (BLDC) 電機的日益普及是由于使用了電子換向。這取代了由刷子在換向器上摩擦以激勵直流電機電樞中的繞組的傳統機制。
與傳統直流電機相比,電子換向提供更高的效率,在相同速度和負載下運行的電機可提高 20% 至 30%。正如國際能源署報告的那樣,全球 40% 的電力用于為電動機提供動力,這樣的效率提升變得引人注目。
此外,BLDC 電機更耐用。它保持其高性能,而等效的傳統電機的效率和功率因磨損而下降,導致電刷接觸不良,電刷和換向器之間的電弧耗散能量,以及影響導電性的污垢。
更高的效率允許 BLDC 電機在給定的功率輸出下做得更小、更輕、更安靜,從而進一步提高其在汽車等領域的普及度;白色家電;以及供暖、通風和空調 (HVAC)。BLDC 電機的其他優點包括卓越的速度與扭矩特性(啟動時的扭矩除外)、更動態的響應、無噪音運行和更高的速度范圍。
BLDC 電機的缺點是其復雜性以及相關的成本增加。電子換向需要監控電路來確保線圈通電的精確定時,以實現精確的速度和轉矩控制,并確保電機以最高效率運行。
幸運的是,這個領域正在迅速成熟,硅供應商現在提供各種高度集成的 BLDC 電機驅動器功率 MOSFET 芯片,帶有外部或嵌入式微控制器,以簡化設計過程,同時降低組件成本。本文將解釋設計人員如何利用這些最新芯片來簡化設計過程
BLDC 電機基礎知識
所有電動機,無論是機械換向還是電子換向,都遵循將電能轉換為機械能的相同基本方法。通過繞組的電流會產生磁場,在存在第二個磁場(通常由永磁體啟動)的情況下,該磁場會在該繞組上產生一個力,當其導體與第二個磁場成 90° 時,該力達到最大值。增加線圈的數量會提高電機輸出并平滑電力輸送。(Monolithic Power Systems (MPS) 制作了一份應用說明(參見參考資料 1),它很好地總結了電機的基本概念。)
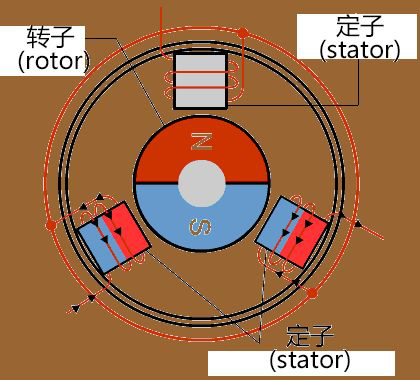
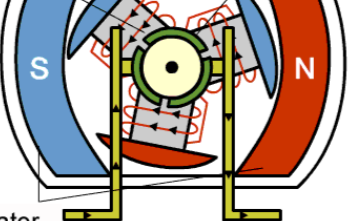
BLDC 電機通過反轉電機設置克服了對機械換向器的要求;繞組成為定子,永磁體成為轉子的一部分。定子通常由鋼疊片組成,軸向開槽以容納沿其內周邊的偶數個繞組。轉子由一個軸和一個帶有永久磁鐵的輪轂組成,這些永久磁鐵排列成兩到八個在“N”和“S”之間交替的極對。圖 1 顯示了常見磁體布置的一個示例,在這種情況下,兩個磁體對直接粘合到轉子輪轂上。
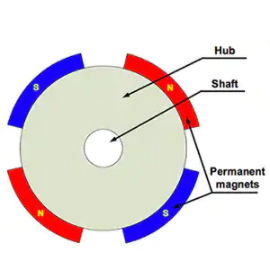
圖 1:在 BLDC 電機中,永磁體連接在轉子上。典型配置包括在“N”極和“S”極之間交替的兩到八對。(禮貌:MPS)
因為繞組是固定的,所以可以建立永久連接來為它們供電。為了使固定繞組移動永磁體,繞組需要以受控順序通電(或換向)以產生旋轉磁場。
由于定子產生的旋轉磁場使轉子以相同的頻率旋轉,因此 BLDC 電機被稱為“同步”型。BLDC 電機可以是一相、二相或三相。三相 BLDC 電機是最常見的,將成為本文其余部分的主題。
BLDC 電機控制
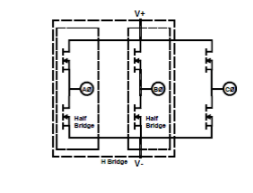
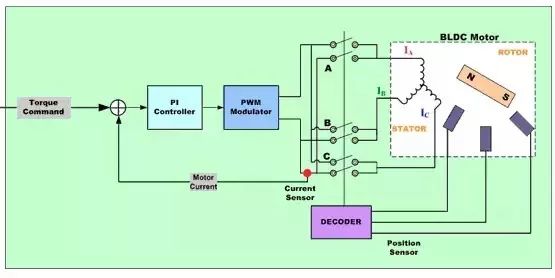
到目前為止,向三相 BLDC 電機順序施加電流的最常見配置是使用以橋式結構排列的三對功率 MOSFET,如圖 2 所示。每對功率 MOSFET 控制電機一相的開關。在典型布置中,高側 MOSFET 使用脈寬調制 (PWM) 進行控制,脈寬調制 (PWM) 將輸入直流電壓轉換為調制驅動電壓。PWM 的使用可以限制啟動電流并提供對速度和轉矩的精確控制。PWM 頻率是在高頻發生的開關損耗和低頻發生的紋波電流之間進行權衡,在極端情況下,可能會損壞電機。通常,設計人員使用的 PWM 頻率至少比最大電機轉速高一個數量級。
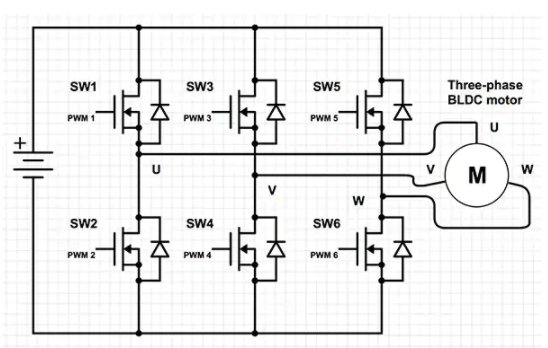
圖 2:三相 BLDC 電機通常由以橋式結構排列并由 PWM 控制的三對 MOSFET 供電。PWM 提供對電機速度和扭矩的精確控制。(使用Digi-Key Scheme-it?繪制的圖表)
電子換向有三種控制方案:梯形、正弦和磁場定向控制。梯形技術(在下面的示例中描述)是最簡單的。在每一步,兩個繞組通電(一個“高”和一個“低”),而另一個繞組浮動。梯形方法的缺點是這種“階梯式”換向會導致扭矩“波動”,尤其是在低速時。
正弦控制更復雜,但它減少了轉矩脈動。在此控制狀態下,所有三個線圈都保持通電狀態,每個線圈中的驅動電流都以 120° 的角度正弦變化。與梯形技術相比,其結果是更平滑的功率傳輸。
磁場定向控制依賴于測量和調整定子電流,使轉子和定子磁通之間的角度始終為 90°。與所有其他技術相比,這種技術在高速下比正弦方法更有效,并且在動態負載變化期間提供更好的性能。幾乎沒有轉矩脈動,在低速和高速下都可以實現更平滑、更精確的電機控制。
本文將把其余的技術討論限制在梯形技術上。
在采用梯形控制方案的電機中,MOSFET 電橋開關必須以精確定義的順序發生,以使 BLDC 電機高效運行。切換順序由轉子磁體對和定子繞組的相對位置決定。三相 BLDC 電機需要六步換向序列才能完成一個電氣循環。每個電循環的機械轉數由轉子上的磁體對數決定。例如,將需要兩個電循環來機械旋轉由兩對磁體組成的轉子一圈。
有傳感器與無傳感器
兩種技術為位置反饋提供了解決方案。第一種也是最常見的使用三個霍爾效應傳感器,嵌入在定子中并以相等的間隔排列,通常為 60° 或 120°。第二種“無傳感器”控制技術適用于需要最少電氣連接的 BLDC 電機。
在配備傳感器的 BLDC 電機中,每個霍爾效應傳感器都與一個開關組合,該開關產生邏輯“高”(對于一個磁極)或“低”(對于相反磁極)信號。換向順序是通過組合來自霍爾效應傳感器和相關開關的邏輯信號來確定的。在任何時候,至少有一個傳感器被轉子的一個磁極觸發并產生電壓脈沖。
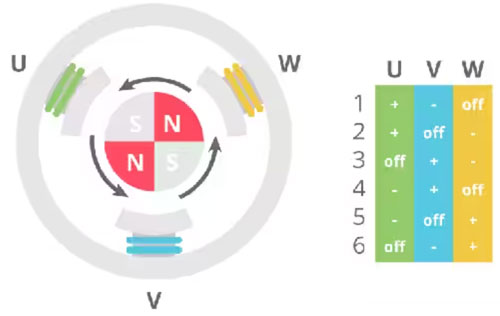
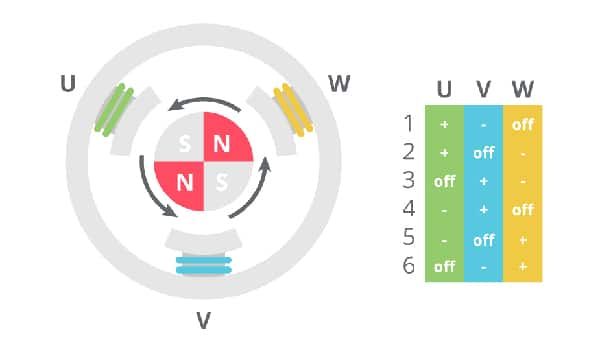
圖 3 顯示了逆時針驅動的三相 BLDC 電機的換向順序。霍爾效應傳感器安裝在位置“a”、“b”和“c”。對于換向序列中的每一步,MOSFET 橋將一個繞組(“U”、“V”或“W”)驅動為高電平,同時將一個繞組驅動為低電平,第三個保持懸空。例如,在圖的左上角,U 為高電平(形成 N 極),V 為低電平(S),W 為浮空。產生的磁場使轉子逆時針移動,因為它的永磁體被一個繞組排斥并被下一個繞組吸引。第二階段(下圖)顯示繞組 U 保持高電平,而 V 切換為浮動,W 切換為低電平,從而保持磁場的“旋轉”并隨之移動轉子。剩余的換向步驟,一個電循環,
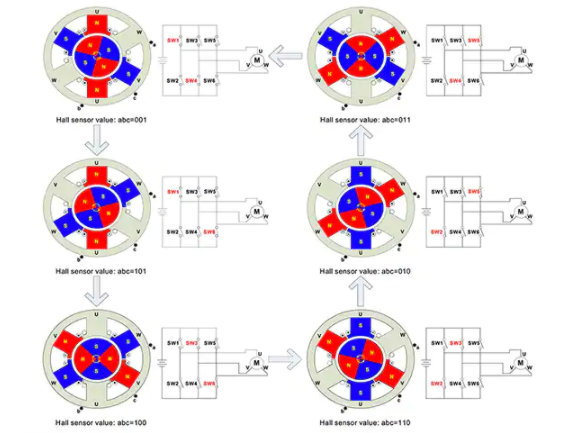
圖 3:使用 MOSFET 電橋和霍爾效應傳感器的三相 BLDC 電機的電子換向序列。在這種情況下,轉子逆時針驅動,霍爾效應傳感器(“a”、“b”和“c”)以 60° 的間隔安裝。(禮貌:MPS)
圖 4 顯示了與上圖 3 所示逆時針旋轉電機的霍爾效應傳感器信號相關的相繞組狀態。
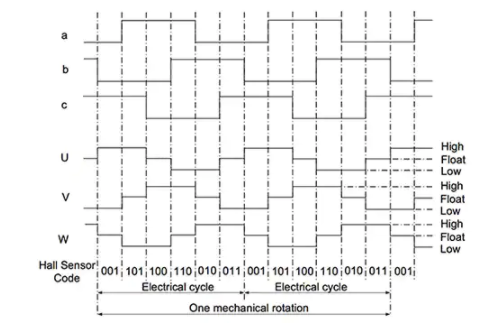
圖 4:逆時針驅動的三相 BLDC 電機的霍爾效應傳感器邏輯開關輸出和繞組狀態時序圖。請注意至少有一個邏輯開關和繞組每 60° 改變一次狀態。(禮貌:MPS)
無傳感器 BLDC 電機利用電動勢 (EMF) 在任何直流電機的繞組中產生電流,其磁場與楞次定律所描述的磁通量的原始變化相反。EMF 傾向于抵抗電機的旋轉,因此被稱為“反”EMF。對于具有固定磁通量和繞組數量的給定電機,EMF 與轉子的角速度成正比。
通過監控反電動勢,經過適當編程的微控制器可以確定定子和轉子的相對位置,而無需霍爾效應傳感器。這簡化了電機結構,降低了成本,并消除了支持傳感器所需的額外接線和電機連接,從而提高了可靠性。
然而,由于靜止電機不產生反電動勢,控制器無法在啟動時確定電機位置。解決方案是以開環配置啟動電機,直到產生足夠的 EMF 供控制器確定轉子和定子位置,然后接管監控。如果電機用于禁止反向旋轉的應用,則使用更復雜的控制機制。
上述 BLDC 電機的每個繞組產生的反電動勢如圖 5 的下半部分所示。這與配備傳感器的可比 BLDC 電機的霍爾效應傳感器邏輯開關輸出進行了比較。從圖中可以看出,繞組中產生的電動勢的零交叉點與邏輯開關的開關狀態變化相吻合。微控制器使用這種過零信息來觸發無傳感器 BLDC 電機中換向周期的每個階段。(請參閱圖書館文章“通過反電動勢控制無傳感器、BLDC 電機”。)
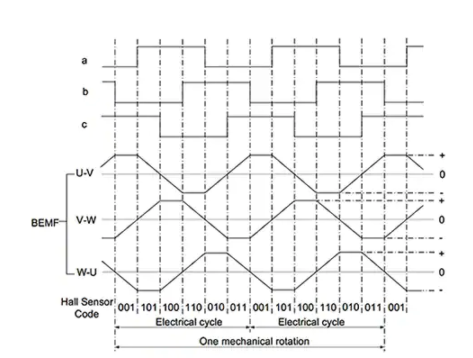
圖 5:逆時針驅動 BLDC 電機的霍爾效應傳感器邏輯開關輸出與回繞 EMF 的比較。請注意,用于控制無傳感器 BLDC 電機的反電動勢信息的零交叉點如何與配備傳感器的 BLDC 電機中邏輯開關的狀態變化相一致。(禮貌:MPS)
設計 BLDC 電機
雖然涉及 BLDC 電機換向的原理,但 BLDC 電機功率和控制電路設計并非必須如此。市場上有許多經過驗證的集成產品可用作電路的構建塊。包含柵極驅動器或集成 MOSFET 的 BLDC 電源模塊位于電路的核心。
Allegro Microsystems 的 A4915三相 MOSFET 驅動器用作 BLDC 電機的六功率 MOSFET 橋的預驅動器。該設備專為電池供電的產品而設計。節能的一個顯著特點是低功耗睡眠模式,可確保設備在不轉動電機時消耗最小的電流。該器件還具有同步整流功能,這是一種從開關穩壓器中借用的技術,可降低功耗并消除對外部肖特基二極管的需求。
Microchip還為 BLDC 電機的六功率 MOSFET 橋提供預驅動器,但這次是用于汽車、家用電器和業余愛好產品中使用的小型無傳感器單元。MCP8025器件集成了一個降壓(“降壓”)開關穩壓器來為外部控制器供電,此外還有兩個低壓差 (LDO) 線性穩壓器和一個電荷泵來為 MOSFET 橋供電。
該芯片通過測量浮動繞組的反電動勢來使事情變得簡單,然后將其與電機的中性點進行比較。當反電動勢越過零點時,過零檢測器向主機控制器發送信號以指示換向參考點。
Texas Instruments的DRV8313通過集成三個可單獨控制的半 H 橋驅動器更進一步。這種安排的優勢在于,除了用于三相 BLDC 電機控制外,該芯片還可用于驅動機械換向電機(使用兩個半 H 橋)或三個獨立的螺線管。該芯片可通過 8 至 60 V 電源提供高達 3.5 A 的電流。
DRV8313 不包括傳感器輸入。TI 建議,對于有傳感器或無傳感器操作,該芯片應與流行的MSP430等微控制器配合使用。如圖 6 所示,這種布置為帶傳感器的三相 BLDC 電機提供了完整的閉環控制系統。
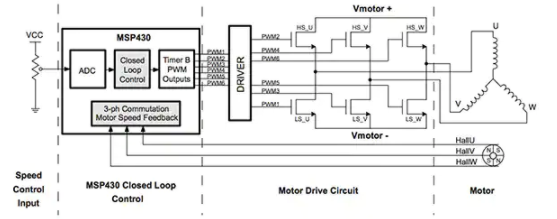
圖 6:用于感應式三相 BLDC 電機的完整閉環控制系統。該電路包括一個模擬速度輸入、監控功率 MOSFET 的 PWM 輸出的 MSP430 微控制器、一個六 MOSFET 橋驅動器、MOSFET 橋和 BLDC 電機。電機定子和轉子位置由向微控制器提供信號的三個霍爾效應傳感器確定。(禮貌:德州儀器)
TI 提供了一個替代部件DRV8308,它不集成 MOSFET。但是,它可以直接從三個霍爾效應傳感器獲取輸入,因此如果愿意,可以在沒有額外微控制器的情況下使用。
雖然霍爾效應傳感器是一種經過驗證的位置反饋解決方案,但位置傳感器技術的發展提供了更高的精度和更有效的換向序列的承諾。例如,Analog Devices 的ADA4571是一款角度傳感器和信號調節器,可以用單個器件替代典型三相 BLDC 電機設計中的三個霍爾效應傳感器。優點是節省空間并且只需要使用單個信號。
ADA4571 使用各向異性磁阻 (AMR) 技術。一種典型的實施方式是在 BLDC 電機軸的末端安裝一個徑向磁化圓盤。圓盤的磁場穿過傳感器的平面,并且在機械和電氣部件之間不接觸的情況下確定轉子角度。
單個各向異性磁阻傳感器可以放置在安裝在 BLDC 電機軸端的圓盤磁鐵附近,取代三個霍爾效應傳感器用于 BLDC 電機角度傳感,節省空間并簡化信號處理。
ADA4571 提供與旋轉磁場角度相關的放大余弦和正弦輸出信號。輸出電壓范圍與電源電壓成比例。Analog Devices 建議將該傳感器與AD7866 12 位 ADC 組合使用,以將 ADA4571 的模擬信號轉換為 BLDC 電機驅動控制器或外部微控制器所需的數字信號。
Analog Devices 聲稱,使用單個角度傳感器不會影響換向精度,因為 ADA4571 能夠將檢測到的角度誤差限制在最大 +/-0.25° 的 BLDC 電機速度高達 25,000 rpm 的情況下。
結論
BLDC 電機的電子換向需要精確控制,這增加了電機電路的復雜性和成本。然而,效率的回報,如降低的功率、可靠性和空間,以及最終產品的重量減輕,遠遠抵消了這些缺點。此外,各種經過驗證的集成 BLDC 電機驅動器顯著簡化了設計過程,同時增加了設計人員針對特定應用微調設計的靈活性。
參考:
“Brushless DC Motor Fundamentals,” Jian Zhao and Yangwei Yu, MPS Application Note (AN047), July 20













 工商網監
工商網監
評論