 電子發(fā)燒友App
電子發(fā)燒友App


PLC在電廠鍋爐排渣改造工程中的應用
?
該系統(tǒng)控制范圍包括從冷渣器正常出口以及事故出口開始到原氣力輸送系統(tǒng)的進口之間的所有設備的控制。
一、系統(tǒng)描述
每臺冷渣器排渣口,兩個事故排渣口和正常排渣口下設一臺鏈斗式輸送機和刮板輸送機將底渣送至冷渣器外,由斗式提升機提到位于渣斗頂部的破碎機,由破碎機破碎后,進入氣力輸送系統(tǒng),由氣力輸送系統(tǒng)送至渣倉。
為保證冷渣器運行的正壓以及保證熱空氣不會從事故排渣口排出,在冷渣器一、二室裝設壓差檢測裝置,以壓差信號來控制事故排渣口插板門開關,從而控制冷渣器內底渣的料高以達到保證冷渣器內熱空氣不會從事故排渣口排出。
為保證冷渣器中底渣能從正常排渣口全部排出,將原DN420的正常排渣口擴至DN550。正常排渣口下裝設中間渣斗,中間渣斗上設高、低料位計,以料位計控制中間渣斗中料高,從而保證冷渣器中熱空氣不會排至后續(xù)機械輸送系統(tǒng)。中間渣斗出口裝設插板門和電動給料機,以達從正常排渣口均勻給后續(xù)機械輸送系統(tǒng)給料。
考慮到從事故排渣口排出的底渣溫度較高,為保證斗式提升機的安全可靠性,每套系統(tǒng)斗式提升機設兩臺,一臺運行,一臺備用;斗式提升機出口設有就地事故排渣口,以保證后續(xù)氣力輸送系統(tǒng)故障時能就地排渣。
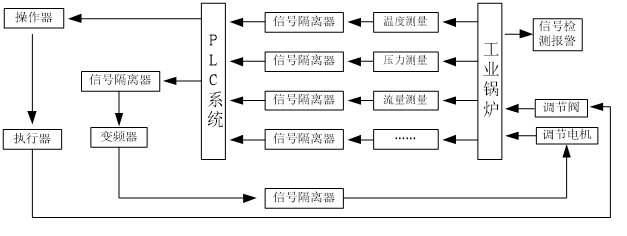
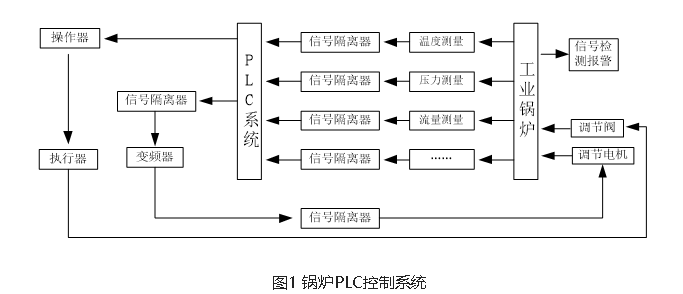
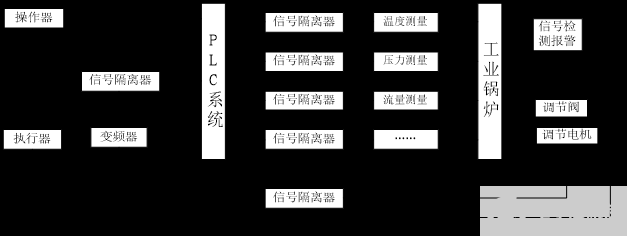
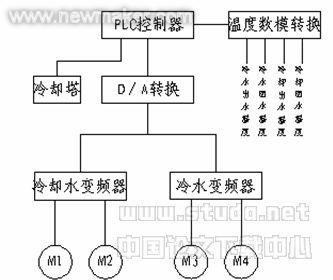
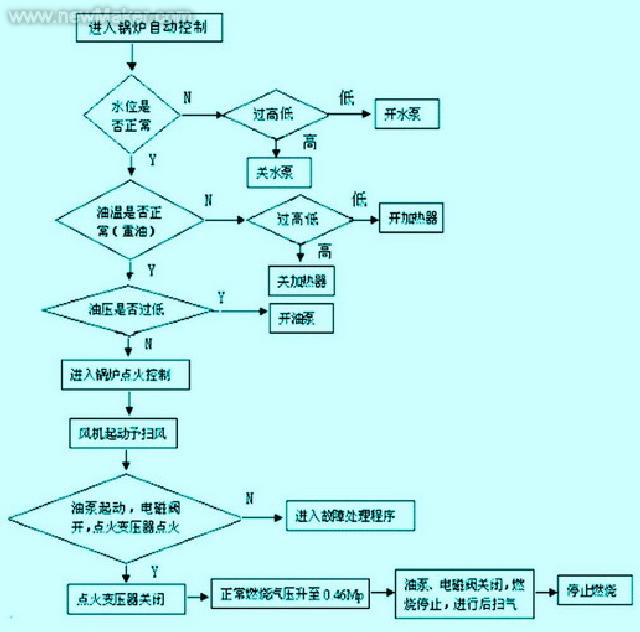
鑒于以上情況,通過采用PLC(可編程控制器)控制系統(tǒng),解決當前存在的問題。系統(tǒng)的工作原理框圖如下:
系統(tǒng)操作運行分別設有“遠程自動”、“遠程手動”、“就地手動”三種工作模式。“遠程自動”模式為正常的主要運行方式,根據(jù)系統(tǒng)滿足自動順序運行的條件,在操作員站(控制室內的觸摸屏)上操作完成整個除渣工藝流程。在自動順序執(zhí)行期間,出現(xiàn)任何故障或運行人員中斷信號,都能使正在運行的程序中斷并回到安全狀態(tài),使程序中斷的故障或運行人員的指令都將在觸摸屏上實時顯示。當故障排除后,自動控制在確認無誤后可再進行啟動。系統(tǒng)有豐富的保護和故障界面供操作人員進行操作和分析。 “遠程手動”模式為運行人員在觸摸屏上點觸每一個被控對象。遠方控制操作有許可條件,以防止運行人員誤動作。在遠方手動模式下,系統(tǒng)提供了豐富幫助操作指導和反饋信息,指引操作人員的操作,以防止誤操作。“就地手動”模式是運行人員通過就地控制箱操作被控對象,就地操作與遠方程控操作之間有相互連鎖。
1、PLC控制系統(tǒng)的特點及組成
PLC在現(xiàn)代工業(yè)控制領域中早己得到了廣泛的應用。以PLC的控制功能而言,具有嚴謹、方便、易編程、易安裝、可靠性高等優(yōu)點。它通用性強,適應面廣,特別在數(shù)字量輸入/輸出等邏輯控制領域有無可比擬的優(yōu)點。PLC具有豐富的邏輯控制指令和高級應用指令,它提供高質量的硬件、高水平的系統(tǒng)軟件平臺和易學易編程的應用軟件平臺。另外,PLC即有自身的網絡體系又有開放I/0及通訊接口,很容易組建網絡并實現(xiàn)遠程訪問。
PLC采用的Siemens公司生產的S7-300系列,由于現(xiàn)場的PLC系統(tǒng)與控制室的上位機距離較遠(800米左右),因此通訊系統(tǒng)需成對加裝RS-485中繼器,確保系統(tǒng)運行的穩(wěn)定性。
(1) 系統(tǒng)結構及硬件配置
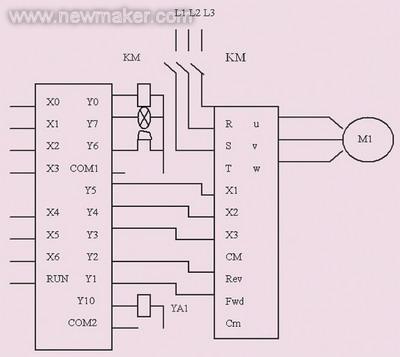
根據(jù)控制需求,CPU模塊采用CPU314、數(shù)字量輸入(DI)采用SM321模塊,數(shù)字量輸出(DO) 采用 SM322模塊,模擬量輸入(AI) 采用 SM331模塊,模擬量輸出(AO) 采用 SM332模塊以及IM365等模塊組成,IM365實現(xiàn)機架擴展,上位機采用Easyview公司MT510T真彩觸摸屏進行顯示和控制,整個干渣系統(tǒng)的工藝流程及測量參數(shù)、控制方式、順序運行狀況、控制對象狀態(tài)等均能夠清楚地顯示在觸摸屏上,當參數(shù)越限報警或控制對象故障或狀態(tài)發(fā)生變化時,以不同的顏色進行顯示,使操作人員能夠一目了然地了解到系統(tǒng)的運行情況,并實時地根據(jù)工藝要求進行系統(tǒng)參數(shù)進行調整。
(2) 控制系統(tǒng)的功能實現(xiàn)
PLC程序的編制直接關系著底渣系統(tǒng)能否正常工作,而程序設計的關鍵在于編程者對工藝系統(tǒng)的理解程度和程序編制技術的靈活應用。因此,在程序設計中首先考慮了供氣壓力調節(jié)系統(tǒng)的特點,將程序設計細化,分成多個程序模塊,實行模塊化編程。這樣既可以方便的增加或刪除程序模塊,便于現(xiàn)場對工藝的調整,又可針對配套設備可控性對不同程序模塊進行完善。
PLC的編程軟件采用SIEMENS公司的SIMATIC STEP7 V6軟件平臺用來完成硬件組態(tài)、地址和站址的分配以及編制整個生產過程的控制程序的。上位機監(jiān)控軟件采用國產軟件組態(tài)王,全部采用漢化界面,便于系統(tǒng)的開發(fā)與操作,該系統(tǒng)運行于Windows2000中文平臺,可實現(xiàn)對生產過程的全面監(jiān)控,對重要參數(shù)形成歷史記錄,以報表或曲線的形式顯示給操作人員。通過VB語言腳本,可以在主控室的上位機顯示重要參數(shù)的歷史趨勢、實時趨勢,實現(xiàn)聯(lián)鎖調節(jié)的手自動切換、操作、壓力的高、低限報警、流量數(shù)據(jù)的顯示與累計,滿足高生產率的調度需求。
(3) 現(xiàn)場顯示
現(xiàn)場采用MCC屏進行參數(shù)控制,觸摸屏程序由組態(tài)軟件來完成,人機界面采用中文菜單,界面友好,操作方便,功能較強,主要用于現(xiàn)場壓力、流量、閥位的顯示與操作。可作為操作人員現(xiàn)場操作的依據(jù)。
二、系統(tǒng)實現(xiàn)排渣系統(tǒng)的自動控制和監(jiān)控
主要包括如下功能:
(1) 靈活的操作方式以及強大的系統(tǒng)控制功能:系統(tǒng)可以實現(xiàn)上位機操作、控制柜操作和就地手動操作;
(2) 報警功能:當溫度超過工藝要求,可在現(xiàn)場、就地實現(xiàn)越限報警;
(3) 簡單、方便的參數(shù)設定: 壓力調節(jié)的壓力設定值、P、I、D等參數(shù)可以在上位機中設定。
1 、系統(tǒng)控制功能
(1) 過程控制的功能:
1)系統(tǒng)對床壓實現(xiàn)了PID自動調節(jié)控制;
2)對所采集的模擬信號進行線性化、濾波、工程單位轉換處理;
3)實現(xiàn)了流量信號的溫、壓補償,提高了儀表的測量精度。
(2) 邏輯控制
聯(lián)鎖邏輯控制實現(xiàn)開/關的控制,邏輯控制及用戶自定義功能塊等。系統(tǒng)可以實現(xiàn)電磁閥控制以及參數(shù)越限報警等功能
(3) 人機接口
HMI系統(tǒng)中包含主工藝畫面,分系統(tǒng)畫面,畫面直觀、豐富,具備PID在線調節(jié)、在線顯示功能,包括過程量變化趨勢的實時趨勢。
三、軟件設計
根據(jù)該系統(tǒng)具體情況,PLC系統(tǒng)軟件設計過程中著重要考慮的是以下幾個方面:
(1) 數(shù)據(jù)采集及工程量轉換
(2) PID算法
(3) 流量溫壓補償計算以及流量的累積計算
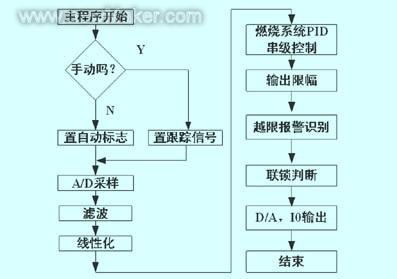
對于系統(tǒng)中的邏輯控制選用梯形圖(LADDER)編程,直觀、方便;對于PID回路控制流量溫壓補償計算以及流量的累積計算部分則采用語句表(STL)編程,結構緊湊而又靈活。 PID調節(jié)是該系統(tǒng)中最為重要的控制程序,因此特將PID算法作一重點介紹。
1、PID算法
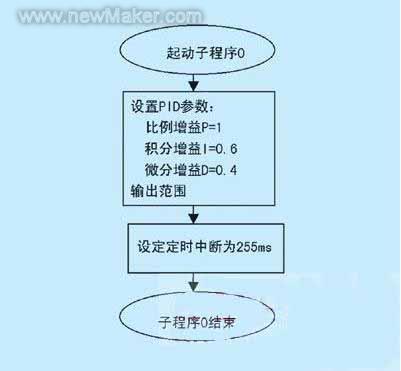
STEP7提供了兩種常用的PID算法:連續(xù)型PID(FB41)和離散型PID(FB42),根據(jù)實際要求,選用的是FB41。并在組態(tài)王中使用畫圖功能模擬一個PID調節(jié)器的操作面板,完成PID調節(jié)控制中的手/自動切換、給定值輸入、手動輸出值輸入、PID參數(shù)(比例系數(shù)、積分時間)輸入等功能。
PID算法的輸出實際上是比例(P)、積分(I)、微分(D)三部分作用之和:
Mn=MPn+MIn+MDn
MPn = GAIN?(SPn- PVn)
MPn = GAIN ? TS/ TI?(SPn- PVn)+ MX
MDn = GAIN ? TD/ TS?(PVn-1- PVn)
Mn:第n次采樣時刻的輸出值。
MPn:第n次采樣時刻的比例作用,與偏差成正比。
MIn:第n次采樣時刻的積分作用,可以消除靜差,提高控制品質。
MDn:第n次采樣時刻的微分作用,根據(jù)差值的變化率調節(jié),可抑制超調。
SPn:第n次采樣時刻的設定值。
PVn:第n次采樣時刻的過程值。
MX:第n-1次采樣時刻的積分作用,每次采樣計算后自動刷新。
GAIN:回路增益,P參數(shù)。
TI:積分時間常數(shù),即I參數(shù)。
TI:微分時間常數(shù),即D參數(shù)。
TS:采樣時間。
從上面的公式中可以看出,參數(shù)P(GAIN)與P、I、D作用都是成正比的,它決定了PID回路的靈敏度,即調節(jié)速度的快慢;I參數(shù)越大,積分作用越弱,而D參數(shù)越大,微分作用越強。不能單靠理論計算來確定PID參數(shù),唯一的衡量標準就是被控參數(shù)(壓力)的精度和穩(wěn)定度,所以在實際調試中,都是參照被控參數(shù)的實時曲線,反復觀察分析,從而達到最佳的控制效果














 工商網監(jiān)
工商網監(jiān)
評論