請各位大神指導(dǎo),移動式機器人是怎么做EMC保護的,機器人是鋰電池供電,所以就不能接大地了,那么對機器人的干擾是通過何種方式來釋放或轉(zhuǎn)移的?
2016-07-26 13:33:14
激光雷達作為自動駕駛和機器人等領(lǐng)域中的重要傳感器,一直扮演著“眼睛”的角色,360°掃描周圍環(huán)境,構(gòu)建厘米級別高精度地圖,為后續(xù)避障導(dǎo)航做輔助。 但如果僅使用激光雷達作為唯一的避障傳感器,則
2018-08-27 15:44:02
現(xiàn)在想做機器人圖像識別方面的研究,有問題請教大家,比如說:現(xiàn)在有十種瓶子,機器人能識別我指定的瓶子,并把它從A位置移動到B位置,關(guān)鍵是如何識別呢,不是很清楚,求大神指點!在此感激不盡!
2019-11-04 09:02:57
鋼琴曲目的機器人,只需要它實現(xiàn)能彈奏曲目。因為現(xiàn)在剛剛接觸機器人制作方面,只懂一些中斷和舵機啥的,不知道做成的難度有多大,,,,希望各位前輩能夠不舍賜教。如果能做成,都需要實現(xiàn)哪些模塊呢?!
2017-05-22 17:09:06
鋼琴曲目的機器人,只需要它實現(xiàn)能彈奏曲目。因為現(xiàn)在剛剛接觸機器人制作方面,只懂一些中斷和舵機啥的,不知道做成的難度有多大,,,,希望各位前輩能夠不舍賜教。如果能做成,都需要實現(xiàn)哪些模塊呢?!
2017-05-22 17:06:22
走路,想要遞送文件、開個遠程會議,是不是可以隨時讓機器人為你服務(wù)。這一切,是不是都得建立在機器人能自主行走、導(dǎo)航和避障的基礎(chǔ)上。 安保安防安防服務(wù)機器人通過Wifi或4G網(wǎng)絡(luò)將機器人狀態(tài)、位置、周圍
2018-01-03 11:41:55
大家覺得下面哪個機器人題目做起來挑戰(zhàn)更大一些1.避障競跑,30m,室外草地(不知是草坪還是塑膠跑道,郁悶。。。)2.拔河比賽,機器人重量
2013-03-25 17:20:33
機器人的定義是什么?機器人優(yōu)點和缺點是什么?機器人是由哪些部分組成的?工業(yè)機器人的應(yīng)用有哪些?
2021-07-05 06:48:21
機器人的移動通常是從管理機器人總體任務(wù)進度的中央處理器發(fā)出位置變化請求時開始的。導(dǎo)航系統(tǒng)通過制定行程計劃或軌跡以開始執(zhí)行位置變化請求。行程計劃需考慮可用路徑、已知障礙位置、機器人能力及任何相關(guān)的任務(wù)目標。
2019-09-10 10:44:32
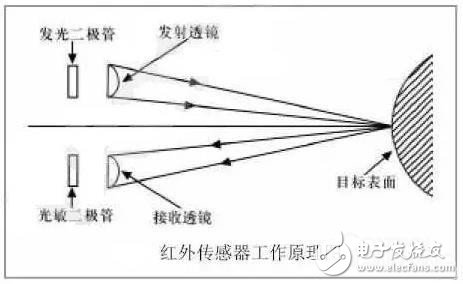
技術(shù)研發(fā)將會越來越受重視。本文所開發(fā)的機器人作品以盛群半導(dǎo)體八位微控制器(MCU)為核心,具有計程、位置推算、紅外線傳感避障、中文語音提示、地磁角度測量、地磁角度修正等功能,使用個人計算機(PC)或
2019-06-27 07:02:14
機器人、地面送餐機器人、空中傳菜機器人、迎賓機器人等20個各式機器人。它們長相色彩各異,個頭1.3至1.6米不等,可以呈現(xiàn)10多種面部表情,會講簡單語句,送餐機器人都裝有超聲波探測裝置進行避障。2013
2014-07-26 09:11:04
模式:它可以使用HC-SR04傳感器感應(yīng)是否存在要跟隨的物體;跟蹤模式:追隨者機器人是跟隨黑線或白線的車輛;避開模式:避障機器人是一種智能設(shè)備,可以自動感知前方的障礙物,并通過將自己轉(zhuǎn)向另一個方向來避開障礙物。
2020-09-27 15:09:45
模式:它可以使用HC-SR04傳感器感應(yīng)是否存在要跟隨的物體;跟蹤模式:追隨者機器人是跟隨黑線或白線的車輛;避開模式:避障機器人是一種智能設(shè)備,可以自動感知前方的障礙物,并通過將自己轉(zhuǎn)向另一個方向來避開障礙物。`
2020-10-28 18:09:41
描述多功能Arduino機器人這主要是一輛藍牙控制的汽車。但是您可以將其升級為避障車和跟隨車。這也包含在PCB中。
2022-07-04 06:59:46
,該軟件還包含能夠輕松在實時嵌入式硬件上實現(xiàn)的機器人IP,用于避障、動力學(xué)和搜尋算法,幫助自主系統(tǒng)或機器人選擇最佳路徑。 “在過去23年里,LabVIEW開發(fā)環(huán)境的發(fā)展非常顯著。LabVIEW從最初
2019-05-21 07:40:08
瑞典公司Acconeer發(fā)明了一種PCR雷達傳感器(脈沖相干雷達),可以測量距離、材料識別等,功耗才3毫瓦,人民幣幾十元,可以在機器人避障、無人機定高、掃地機器人地毯識別中有所運用。
2018-09-18 17:33:34
` 本帖最后由 岑輝 于 2014-3-24 18:19 編輯
隨著部長們的巔峰之作的出品,電子創(chuàng)新工作室團隊又已出爐一件作品PLC做的智能避障機器人,此作品基本架構(gòu)已經(jīng)完成,隨后將進入完善改進和調(diào)試階段,望大家給出一些意見和建議!`
2014-03-17 22:21:19
:設(shè)計一種基于ARM的智能清潔機器人控制系統(tǒng)。機器人能對未知的室內(nèi)環(huán)境進行全面清掃具備避障和臺階檢測功能能實現(xiàn)電量管理自動返回充電。內(nèi)容包括:1、基于單片機對直流電機的啟動、轉(zhuǎn)向、轉(zhuǎn)速、正反轉(zhuǎn)程序
2015-07-06 10:59:02
地上則會滿屋子跑,追都追不上。這是一個簡單的避障機器人,所謂“避障”即避開障礙物,實際上就是遇到障礙物時會轉(zhuǎn)彎掉頭。`
2012-01-10 16:50:53
取走,抽屜自動收回,不會使顧客產(chǎn)生誤會并拿錯別人的用餐,其他顧客發(fā)出指令,他會自動走去下一個送餐地點,完成相應(yīng)的送餐任務(wù)(如果主人現(xiàn)在發(fā)出指令 ,機器人會發(fā)出語音提示“正在忙,馬上”)。如果遇到障礙會自動避障,若發(fā)現(xiàn)前往的路
2015-09-29 09:56:27
避障機器人學(xué)習(xí)課程3、預(yù)計成果:學(xué)生在學(xué)習(xí)過程中學(xué)會解決問題、自足思考4、試用計劃:1、拿到機器后,首先我將會把機器人的壁障原理與使用方法弄懂2、開展專題課程,講述使用方法3、學(xué)生開始自主練習(xí)4、分析學(xué)習(xí)成果與進程
2017-07-07 18:05:19
模塊、驅(qū)動模塊、循跡模塊、避障模塊以及輔助模塊,實現(xiàn)機器人根據(jù)游客要求提供最優(yōu)參觀景區(qū)線路,并進行全程智能解說服務(wù)
2016-11-14 18:51:02
超聲波測距模塊來實現(xiàn)避障功能,接受來自手機發(fā)送來的指令,以實現(xiàn)機器人的各種運動。本作品采用定時中斷的方式來控制多路數(shù)字舵機,以達到多舵機協(xié)調(diào)控制的作用。
2015-07-17 16:53:26
。項目描述:設(shè)計一種基于ARM的智能清潔機器人控制系統(tǒng)。機器人能對未知的室內(nèi)環(huán)境進行全面清掃具備避障和臺階檢測功能能實現(xiàn)電量管理自動返回充電。內(nèi)容包括:1、基于單片機對直流電機的啟動、轉(zhuǎn)向、轉(zhuǎn)速、正反
2015-07-06 11:07:41
來控制。試用計劃主要有:1、開箱測試;2、讓linux操作系統(tǒng)跑起來;3、讓板子連上wifi;4、交叉編譯opencv等模塊;5、讓機器人實現(xiàn)室內(nèi)避障、導(dǎo)航;6、嘗試跑一跑機器人操作系統(tǒng)(ROS);7、如有可能,開發(fā)python驅(qū)動,讓小白也能玩轉(zhuǎn)高級機器人。
2016-10-20 15:49:46
申請理由:大學(xué)時期所學(xué)習(xí)的各種課程總是理論性較強,為了是同學(xué)們能夠親身體會所學(xué)習(xí)各科的實用性的必要性,我們選擇了設(shè)計制作雙足行走機器人,在制作過程中讓理論與實際結(jié)合,讓同學(xué)們體會到控制理論,代碼編寫
2015-11-30 15:57:04
申請理由:1:對機器人開發(fā)有著濃厚的興趣,希望在開發(fā)中成長,在成長中開發(fā)2:有自己的開發(fā)團隊,大家一起努力,這不僅是一個試用,還是一個拓展3:做過51,瑞撒,arduino,zigbee的開發(fā),并
2015-11-30 15:56:26
的投入使用提高了醫(yī)院智能化、自動水平,提升了醫(yī)院品牌和競爭力。2020年,醫(yī)院物流機器人或許將迎來規(guī)模化應(yīng)用的春天。機器人在運行過程中,必須能乘坐電梯,避讓障礙物,所以測距、避障傳感器是提高智能物流
2020-05-28 17:30:09
`小熊開發(fā)板回歸當初的多功能機器人,小車為載體,聯(lián)網(wǎng)平臺為華為云IOT,中間傳輸采用ESP8266wifi模塊,手機APP或者微信小程序為控制終端,具體功能為,機器人的前、后、左、右、左轉(zhuǎn)、右轉(zhuǎn)等動作控制,基本的速度控制,采用超聲波避障,循跡功能,實時視頻傳輸傳輸?shù)浇K端監(jiān)控機器人`
2020-05-31 13:35:01
的共同作用下。中國服務(wù)機器人產(chǎn)業(yè)初具規(guī)模并在未來擁有極大的發(fā)展?jié)摿Α=裉斓?b class="flag-6" style="color: red">機器人方案以電影院迎賓機器人為例功能介紹<section]迎賓接待:自動感應(yīng)人體,主動播放歡迎語、歡送語主動避障
2020-09-21 11:41:20
描述arduino nano避障機器人這是一個流行的 Arduino 機器人項目。為了避免大量的電線連接,我為它設(shè)計了一個PCB。該機器人項目的 PCB設(shè)計精良,易于制作。您可以使用此 PCB 制作不同類型的 Arduino 機器人。PCB+展示
2022-08-02 06:44:42
乒乓球搜集機器人能在地面上漫游,如果發(fā)現(xiàn)在它前面有乒乓球或者跟乒乓球大小相近的物體時,就會啟動兩個手爪將它們收進搜集筐里。乒乓球搜集機器人能自動識別前方的障礙物,從而實現(xiàn)機器人的智能避障.
2016-03-23 17:44:02
ROVER C5 V0501 機器人控制系統(tǒng)采用國際流行的開放式軟硬件平臺,配以自主研發(fā)的避障控制卡、牽引運動卡及機器人內(nèi)控專用編碼器和安全接口;
2019-09-12 09:00:12
龍人四足機器人是一種仿生機器人,由Openduino控制板控制,有四條腿,每條腿兩個自由度,由兩個舵機驅(qū)動,能實現(xiàn)兩種步態(tài)行走。配有三個超聲波,實現(xiàn)大角度智能避障。標準演示程序有5個可愛的表演動作。重要技術(shù)點: 四足機器人的行走步態(tài)設(shè)計、舵機的梯形速度控制、多路舵機的協(xié)調(diào)控制
2016-03-24 16:17:53
,可以實現(xiàn)企鵝機器人對前方障礙物的識別,從而實現(xiàn)企鵝機器人的智能避障和互動表演。重要技術(shù)點:行走結(jié)構(gòu)、行走步態(tài)、語音播放、超聲波導(dǎo)航。
2016-03-29 17:29:52
近年來,我國機器人產(chǎn)業(yè)取得了良好的發(fā)展成果,不管是工業(yè)機器人、服務(wù)機器人還是特種機器人都獲得了廣泛的應(yīng)用。這一方面與全球自動化生產(chǎn)需求的不斷釋放,以及人口紅利的日漸式微密切相關(guān),另一方面更是得益于各種智能技術(shù)的持續(xù)進步與完善。
2020-08-14 07:14:27
激光雷達作為自動駕駛和機器人等領(lǐng)域中的重要傳感器,一直扮演著“眼睛”的角色,360°掃描周圍環(huán)境,構(gòu)建厘米級別高精度地圖,為后續(xù)避障導(dǎo)航做輔助。 但如果僅使用激光雷達作為唯一的避障傳感器,則難以
2018-08-27 17:19:46
描述Arduino 機器人避障 | PCB版| 更少的布線在這個項目中,我使用 PCB 構(gòu)建了一個最小的線版本障礙物,以避免汽車或機器人。技術(shù)細節(jié)/組件超聲波傳感器ARDUINO NANO R3伺服
2022-09-13 06:17:20
1.75米,重約82公斤。波士頓動力2013年被谷歌收購,其最為著名的當屬BigDog狗形機器人,但隨著人形機器人的可行性提升,Atlas最近幾年已經(jīng)成為該公司的重點。該公司的優(yōu)勢在于讓機器人模擬人類的行走方式,同時保持平衡。`
2016-02-25 10:16:20
我今年大一計算機專業(yè) 想做那種清理垃圾機器人帶機械手臂的。。正在放寒假想學(xué)點東西準備一下但網(wǎng)上說的太籠統(tǒng) 而且網(wǎng)絡(luò)普遍都一樣的所以想請教一下 各位高機器人的我應(yīng)該從何學(xué)起 我們就算是一個隊伍吧一共8
2016-01-19 13:44:49
推薦課程:張飛軟硬開源:基于STM32的BLDC直流無刷電機驅(qū)動器(視頻+硬件)http://url.elecfans.com/u/73ad899cfd 由于我現(xiàn)在正在做一個機器人定點移動自主避障
2019-01-25 10:30:29
求一套寫字機器人的程序,用arduino編寫的。怎么實現(xiàn)
2020-10-17 15:20:25
`華南機器人應(yīng)用培訓(xùn)中心擁有各種設(shè)備,開展各種不同的機器人培訓(xùn)班。打造各種工業(yè)現(xiàn)場常見的機器人工作站,現(xiàn)開展KUKA、發(fā)那科、三菱、ABB、愛普生工業(yè)機器人培訓(xùn)對外招生。 一、認識機器人技術(shù):工業(yè)
2015-09-02 14:03:18
本帖最后由 紅塵。破 于 2016-8-19 14:59 編輯
今天整理資料時發(fā)現(xiàn)了一年前做的四足仿生機器人,當時買了一個四足仿生機器人的骨架,畫了個板子,寫了個測試代碼,能完成簡單的行走,后面加了避障、顯示功能啥的,不過視頻資料沒了,只有簡單行走的視頻,優(yōu)酷鏈接在下面評論
2016-08-19 14:59:33
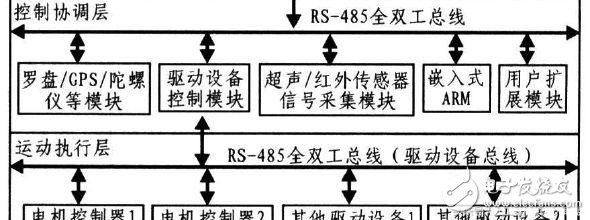
。3.1.1 控制協(xié)調(diào)層的硬件實現(xiàn) 機器人傳感器的選取應(yīng)取決于機器人的工作需要和應(yīng)用特點。這里選用超聲波傳感器、紅外傳感器、電子羅盤及陀螺儀,采集機器人周圍環(huán)境信息,為機器人避障、路徑規(guī)劃提供幫助
2019-07-04 08:30:00
制造出像人一樣具有智能的能替代人類勞動的機器人,一直是人類的夢想,人類獲取的信息80%以上是通過視覺。因此,在智能機器人的研究中,具有視覺的機器人的研究也就成了第一位的。對機器人視覺伺服系統(tǒng)的研究是機器人領(lǐng)域中的重要內(nèi)容之一,其研究成果可應(yīng)用在機器人自動避障、軌跡跟蹤和運動目標跟蹤等問題中。
2019-09-27 08:07:35
`外國牛人造超聲波避障自我充電智能機器人(圖文)`
2012-08-15 20:50:46
`外國牛人造超聲波避障自我充電智能機器人(圖文)`
2012-08-20 19:38:02
控制,通過GPS和5G實時定位巡檢機器人的位置來實現(xiàn)日常例行任務(wù)和特訓(xùn)兩種方式的巡檢;(3) 自動充電,低電自動返航能夠自主判斷電池電量狀態(tài),電量不足自動返航,并與充電設(shè)備配合完成自主充電;(4) 自主避障
2023-04-12 15:49:23
管理移動機器人的導(dǎo)航算法的實現(xiàn)和多任務(wù)的執(zhí)行。實驗結(jié)果表明:該系統(tǒng)能夠實現(xiàn)避障和導(dǎo)航功能并能順利達到目的地。
2020-11-23 15:08:52
Arduino是什么?如何去實現(xiàn)一種基于C語言與Java的WiFi避障小車的設(shè)計?
2021-11-10 07:52:41
如何去實現(xiàn)一種基于STM32的超聲波避障小車代碼呢?超聲波避障代碼有有哪些呢?
2021-11-26 06:52:06
手術(shù)機器人系統(tǒng)的工作原理是什么?如何去實現(xiàn)一種基于傳感器的機器人手術(shù)系統(tǒng)設(shè)計?
2021-09-28 08:46:20
如何去實現(xiàn)一種基于單片機的避障小車及自動循跡的設(shè)計?基于單片機的避障及自動循跡小主要具備哪些功能?
2021-07-19 09:28:44
這是一個非常簡單的
避障機器人,甚至簡單到?jīng)]有使用控制芯片和驅(qū)動電路,使用的都是我們?nèi)粘I钪须S處可見的一些東西,但是卻
實現(xiàn)了基本的
避障功能。第一步:準備材料首先我們要準備所有可能用到的零件,我?guī)缀?/div>
2020-03-10 07:00:00
移動機器人是機器人的重要研究領(lǐng)域,人們很早就開始移動機器人的研究。世界上第一臺真正意義上的移動機器人是斯坦福研究院(SRI)的人工智能中心于1966年到1972年研制的,名叫Shakey,它裝備了
2020-05-14 08:15:00
想做一個自動尋人避障小車,人身上裝有特定的信號源,小車捕捉信號源跟著人走,行走途中可以自動避障(可以用紅外探測器或聲波實現(xiàn)),,離開人距離太遠時可以報警,請問從哪兒下手,哪位高手可以指點一二,在下感激不盡!
2015-10-11 16:28:26
移動機器人是一種能夠感知外部環(huán)境,在有障礙物的環(huán)境中能夠實現(xiàn)動態(tài)決策與規(guī)劃,從而完成避障等多種功能的綜合系統(tǒng)。機器人系統(tǒng)通常分為機構(gòu)本體和控制系統(tǒng)兩部分,控制系統(tǒng)的作用是根據(jù)用戶的指令對機構(gòu)本體進行
2020-03-06 07:07:07
怎么實現(xiàn)三路超聲波避障移動機器人平臺的設(shè)計?
2021-11-10 07:00:11
怎么實現(xiàn)六足機器人的設(shè)計?
2021-11-22 08:02:22
怎么實現(xiàn)基于stm32的grbl寫字機器人的設(shè)計?
2021-11-26 06:52:18
怎么實現(xiàn)對機甲大師機器人的控制?
2021-11-19 06:33:45
中國機器人高端智能裝備產(chǎn)業(yè)網(wǎng)獲悉位于南京地鐵3號線夫子廟站的國內(nèi)首個機器人停車庫已經(jīng)建成,在這個停車庫里,停車、取車全都由機器人完成,車主只需原地站在出入口,就可以實現(xiàn)一鍵停車、取車。相信不少人都有
2017-04-10 09:56:53
定位導(dǎo)航技術(shù)使機器人即使在無人操控的情況下,也可實現(xiàn)自主行走、避障及順利到達目的地,機器人和人類繪制地圖一樣,在描述環(huán)境及認識環(huán)境的過程中都需要依靠地圖,它主要利用地圖類描述其當前環(huán)境信息,并隨著
2020-08-18 06:47:00
要:設(shè)計了一種能順利完成在模擬房間內(nèi)自動滅火任務(wù)的智能滅火機器人。方案以STM32F103嵌入式芯片為控制核心,采用傳感器組采集環(huán)境信號,控制機器人行動。該智能機器人能完成自動循跡、自動避障、自動
2021-09-08 06:47:49
各位大俠怎樣在matlab里面繪制機器人的避障地圖啊?幫幫忙!
2013-05-15 09:25:16
請問大神們?nèi)齻€超聲波傳感器怎么實習(xí)避障
2022-09-09 09:04:09
關(guān)于ros智能機器人,就是一個寫智能機器人代碼的一個虛擬機,
2021-10-13 19:20:16
機器人視覺傳感器詳解一種新型的工業(yè)機器人已經(jīng)走到行業(yè)的前沿, 他們的主要特點是能夠安全地協(xié)助人類工作。在網(wǎng)上有很多人談?wù)撍鼈儯阏J真了解過它嗎?
2020-08-14 07:24:17
我們設(shè)計的這款智能機器人,通過語音識別功能對智能機器人進行遙控,遙控的語音指令有前進、后退、左拐、右拐等運動控制指令,另外還加入一個音頻播放器,可以通過語音對播放器進行控制,遙控的語音指令有上一首
2013-10-26 22:50:23
《智能小車機器人制作大全》匯集了多位創(chuàng)客在智能小車機器人方面的豐碩成果,不僅為剛接觸機器人制作的初學(xué)者提供了詳盡的入門教程,還為有一定基礎(chǔ)和經(jīng)驗的制作者提供了從基礎(chǔ)到高級,覆蓋循跡、避障、跟隨、走
2019-05-05 13:19:44
智能監(jiān)控機器人是近年來機器人應(yīng)用工程中一項前沿性的題目,智能化探測小車是智能行走機器人的一種。智能監(jiān)控機器小車就是針對上述情況,在參考了目前大多數(shù)智能機器人的基礎(chǔ)上,以降低成本為原則設(shè)計的。小車具備
2019-10-14 07:37:52
精準建模和定位。激光雷達具有探測 距離遠、測量速度快、結(jié)果精確度高,機器人可以為所工作的場所建立精準的 2D-3D地圖,為本身提供高精度的導(dǎo)航方式。同時還可以為機器人提供避障功 能,靈活應(yīng)對多變的環(huán)境
2017-06-10 14:24:17
`大多數(shù)機器人有兩個車輪,北醒TF系列激光雷達視場角較小(2°~3.6°),建議使用2個雷達、分別安裝在車身的左右兩側(cè),增大探測范圍和安全冗余,若機器人本身尺寸較小,也可以機身前方僅安裝1個雷達
2020-05-12 14:11:35
紅外線傳感模塊進行避障,程序運行方式有單邊尋邊方式、隨機避障方式、正方形沿邊擴大方式、三角波形方式。掃地電機有斷續(xù)工作、連續(xù)工作。 如果機器人電源電壓不足時,在單邊尋邊避障方式基礎(chǔ)上開啟尋跡(機器人低
2015-02-06 11:40:21
10到15倍。據(jù)悉,機器人快遞員裝有導(dǎo)航和避障系統(tǒng),能夠在99%的時間里全完自主行駛。但考慮到安全問題,人工操作員也會對其進行監(jiān)控。而且機器人擁有內(nèi)置安保功能,可以避免出現(xiàn)貨物被盜的現(xiàn)象。最后
2015-12-31 11:32:10
、專業(yè)基礎(chǔ)課程和專業(yè)課程的實驗和訓(xùn)練平臺,是中國教育機器人大賽群機器人協(xié)作和舞蹈比賽的指定平臺。 重要技術(shù)點: 機器人循線、zigbee網(wǎng)絡(luò)通信、紅外避障
2016-03-24 11:36:19
(以類似于相撲運動的方式)。跟隨模式:它可以使用HC-SR04傳感器感知被跟隨物體的存在。跟蹤模式:線跟隨機器人是一種跟隨一條線的車輛,無論是黑線還是白線。避障模式:避障機器人是一種智能設(shè)備,可以自動
2022-08-23 06:23:44
的研究成果,應(yīng)用領(lǐng)域在不斷地擴大,應(yīng)用復(fù)雜程度也越來越高。移動機器人的自主尋路要求已經(jīng)從之前簡單的功能實現(xiàn)提升到可靠性、通用性、高效率上來,因此對其相關(guān)技術(shù)提出了更高的要求。然而至今沒有任何一種方法能夠在任意環(huán)境使機器人進行有效地避障,如何克服相關(guān)算法的局限性是今后工作的研究方向之一。
2018-12-12 16:04:42
怎樣去設(shè)計一種基于PID算法的巡線機器人?基于PID算法的巡線機器人有哪些優(yōu)勢?
2021-07-27 06:54:05
怎么設(shè)計一種室外移動機器人組合導(dǎo)航定位系統(tǒng)?如何實現(xiàn)室外移動機器人組合導(dǎo)航定位系統(tǒng)的硬件設(shè)計?如何實現(xiàn)室外移動機器人組合導(dǎo)航定位系統(tǒng)的軟件設(shè)計?
2021-04-19 10:50:33
智能機器人紅外發(fā)送接收電路詳解
2019-09-19 09:10:40
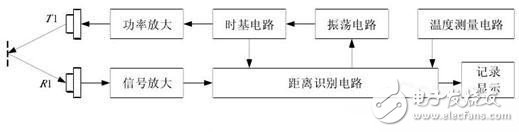
基于超聲波避障技術(shù)是建立在獲取機器人前方障礙物的距離和位置信息上,故超聲波避障技術(shù)主要運用超聲波傳感器,根據(jù)超聲波測距原理,結(jié)合矩陣式結(jié)構(gòu)設(shè)計理念的數(shù)據(jù)融合對機器人前方障礙物的距離和位置進行定位。
2020-05-11 07:23:15
的Arduino來編程。所有這些功能讓蟲蟲的行走更加復(fù)雜,互動更加豐富。可以實現(xiàn)前進、后退、避障拐彎、巡光等功能。簡單的組裝讓你了解最基本的機器人原理和智能控制。喜歡DIY的用戶,還可以在原有代碼的基礎(chǔ)上改造出自己的互動模式。所以,其實打造一款機器人并沒有那么難啦。六足蟲蟲機器人實物展示:
2016-08-02 14:43:18
我是新人,求幫助啊,明天需要提交輪式機器人應(yīng)用的報告,求大神給點建議,可用輪式機器人應(yīng)用于那些方面,要求實際可行,應(yīng)用于生活,農(nóng)業(yè),軍事都可以,謝謝啦
2013-04-17 16:32:16
龍人六足機器人是有六條腿的仿生機器人,每條腿有兩個自由度,由兩個角度舵機控制。控制器采用Stm32機器人控制器,通過編程控制實現(xiàn)12個電機協(xié)調(diào)的控制行走,實現(xiàn)對六足昆蟲的仿生模擬。頭部有三個超聲波,實現(xiàn)大角度范圍的避障。重要技術(shù)點:六條腿協(xié)調(diào)前進 、后退、轉(zhuǎn)彎的算法,超聲波導(dǎo)航和避障
2016-03-23 17:49:48
龍人六足機器人龍人六足機器人是有六條腿的仿生機器人,每條腿有兩個自由度,由兩個角度舵機控制。控制器采用Stm32機器人控制器,通過編程控制實現(xiàn)12個電機協(xié)調(diào)的控制行走,實現(xiàn)對六足昆蟲的仿生模擬。頭部有三個超聲波,實現(xiàn)大角度范圍的避障。重要技術(shù)點:六條腿協(xié)調(diào)前進、后退、轉(zhuǎn)彎的算法,超聲波導(dǎo)航和避障
2016-03-24 16:25:46
算法優(yōu)化升級,建圖更快速、精準 抗強光干擾能力強,適用于各類機器人的建圖、導(dǎo)航及避障先進的光學(xué)和算法系統(tǒng),對強光、 黑白物體、高反物體等均擁有卓越 的探測性能產(chǎn)品輕薄小巧,適用于嵌入各類服 務(wù)機器人機體
2022-07-01 10:52:11
TA6-R5協(xié)作機器人是泰科智能自主研發(fā)的6自由度的協(xié)作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協(xié)同工作。 采用自主設(shè)計的RJS系列關(guān)節(jié)模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-17 17:49:50
已全部加載完成
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論