 電子發(fā)燒友App
電子發(fā)燒友App


這個(gè)有趣但復(fù)雜的項(xiàng)目將涵蓋從設(shè)計(jì)構(gòu)建機(jī)器人到 linux (raspberry pi) 中的高級(jí)配置,再到構(gòu)建 Android 應(yīng)用程序和控制機(jī)器人。
之所以說(shuō)它是個(gè)有趣的項(xiàng)目,是因?yàn)樗纫话愕捻?xiàng)目更有野心,而且我認(rèn)為通過(guò)在這里理解一些想法甚至復(fù)制整個(gè)項(xiàng)目也并不能完全復(fù)現(xiàn)整個(gè)項(xiàng)目,你會(huì)有很多東西需要學(xué)習(xí)。
首先,我們將使用有機(jī)玻璃、塑料板、帶變速箱的直流電機(jī)和各種電子元件來(lái)構(gòu)建機(jī)器人。該設(shè)備將能夠獨(dú)立移動(dòng)兩個(gè)前輪,并且能夠使用它的前照燈。然后我們將設(shè)置為機(jī)器人供電的樹(shù)莓派,并配置項(xiàng)目并安裝各種依賴項(xiàng)。然后我們將構(gòu)建并安裝一個(gè) android 應(yīng)用程序,并使用它通過(guò)攝像頭和 wifi 連接遠(yuǎn)程控制機(jī)器人。
所需技術(shù)和概念:
開(kāi)發(fā)平臺(tái):Arduino、Raspberry pi、Android
電子:H橋,使用晶體管驅(qū)動(dòng)大負(fù)載,紅外傳感器
Linux:使用 docker、docker compose、使用 systemctl 配置服務(wù)、視頻流
編程:Android應(yīng)用程序、python、arduino語(yǔ)言、串口通信、MQTT
第 1 步:需要的東西
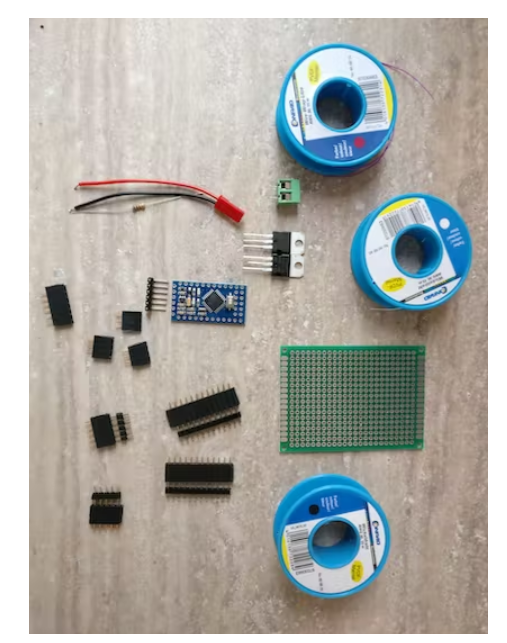
材料:
1.有機(jī)玻璃板
2.塑料板(這里也可以用有機(jī)玻璃板)
3.膠水
4.輪胎+直流電機(jī)帶變速箱+支架。小螺母和螺栓,六角金屬墊片
6. 2 x 任意方向的車輪輪胎
7.小LED手電筒(會(huì)變成頭燈)
8. Arduino pro mini 328p
9. 2 x 紅外障礙物傳感器
10.印刷電路板
11.NPN晶體管(驅(qū)動(dòng)手電筒)
12. L7805CV 5V穩(wěn)壓器
13. L298 H橋
14. Rezistor 220 歐姆
16. 公微型 USB 連接器
17.各種電線
18. 3 v調(diào)節(jié)器(用于arduino和樹(shù)莓派之間的通信)
19. 公母PCB連接器
20.開(kāi)/關(guān)開(kāi)關(guān)
21. XT-60 母 LiPo 連接器
22. 2S 1300 mAh 鋰聚合物電池,帶 XT-60 連接器
23. 5v電池組
24.樹(shù)莓派 3
25.樹(shù)莓派卡
26.樹(shù)莓派案例
27.樹(shù)莓派相機(jī)
工具:
1. USB 到串行 FTDI 適配器 FT232RL 對(duì) arduino pro mini 進(jìn)行編程
2. Arduino IDE
3. 鉆孔
4.細(xì)鋸片
5. 螺絲刀
6.烙鐵
7. 剪線鉗
技能:
1.焊接
2.基本的arduino編程
3.Linux服務(wù)配置、包安裝
第 2 步:構(gòu)建機(jī)器人平臺(tái)
我們要建造的機(jī)器人將具有以下規(guī)格:
- 兩個(gè)單獨(dú)的直流電機(jī)將在前輪上產(chǎn)生牽引力
- 后輪應(yīng)該能夠向任何方向移動(dòng) 360 度
- 方向?qū)⒂汕拜喌淖兯倏刂疲虼瞬恍枰獑为?dú)的方向機(jī)構(gòu),機(jī)器人也可以原地旋轉(zhuǎn)
- 頂部會(huì)有燈
- 它應(yīng)該有足夠的空間放置電子設(shè)備、電池和帶攝像頭的樹(shù)莓派外殼
- 需要幾厘米的離地間隙來(lái)克服小障礙物
注意:不要忘記檢查圖像以獲取重要細(xì)節(jié)和構(gòu)建提示。

我們要用有機(jī)玻璃或硬塑料制造機(jī)器人,我都用過(guò),但你可以選擇任何你想要的。
底板上的底板為 18 x 13 厘米,直流發(fā)動(dòng)機(jī)將用金屬支架螺母和螺栓連接。H 橋?qū)惭b在面向地板的板中間。后輪將使用 2 cm 六角形金屬墊片(一側(cè)為公頭,一側(cè)為母頭)安裝
H 橋附近需要一個(gè)大孔來(lái)連接頂部的電子設(shè)備。
機(jī)器人的頂部由兩個(gè)“L”形的板組成,一個(gè)是 12 x 13 厘米,另一個(gè)是 6.5 x 13 厘米。塑料板將粘在一起。這些板將為電子設(shè)備提供蓋板、安裝前照燈的位置和樹(shù)莓派外殼的支撐。頂部將使用 6 cm 六角形金屬墊片從底部連接
第 3 步:構(gòu)建電子設(shè)備
引腳分配(arduino):
LED手電筒:D3
左電機(jī):PWM (D5), EN1, EN2(A4, A5)
右電機(jī):PWM(D6)、EN1、EN2(A3、A2)
紅外傳感器:前(A0),后(A1)
樹(shù)莓派通信引腳:Tx:D11,Rx:D10
構(gòu)建PCB,組裝
1.在最后一步中,我們已經(jīng)在機(jī)器人的地板側(cè)安裝了 H 橋。我們還需要安裝兩個(gè)紅外傳感器,一個(gè)在前面,一個(gè)在后面。我們將使用一塊小金屬板將它們安裝在底盤(pán)上。金屬板將呈“L”形,并有兩個(gè)孔。我們將使用螺母和螺栓將其安裝在底盤(pán)上。傳感器將位于底盤(pán)的中間,一個(gè)在前面,一個(gè)在后面。
2.接下來(lái)是大燈部分,我為此使用了一個(gè) 5 伏的 LED 手電筒。我已經(jīng)剪掉了頭燈,只暴露了“頭部”部分,并焊接了兩根電線為其供電。然后我將頭燈粘在機(jī)器人頂部的中間,并在頭燈附近鉆了一個(gè)孔,將電纜穿過(guò)孔并焊接一個(gè)小的母頭兩線連接器。
3.組裝樹(shù)莓派外殼。您將需要一個(gè)樹(shù)莓派、一個(gè) pi 相機(jī)、至少 4 GB 的存儲(chǔ)卡、一個(gè) pi 相機(jī)連接器。插入已安裝最新Raspian的卡,然后將pi相機(jī)連接器小心地插入樹(shù)莓派上,然后將其插入相機(jī),然后關(guān)閉外殼。
4.用主要電子元件搭建PCB 。
焊接步驟:
a、切斷母 PCB 連接器,微控制器有兩個(gè) 12 針連接器和兩個(gè) 5 針連接器,紅外傳感器有兩個(gè) 3 針連接器,H 橋有一個(gè)六針連接器,樹(shù)莓派通信有一個(gè)針連接器(接地,TX,RX)
b、切斷所有連接器后,必須在 PCB 背面焊接
c、焊接 KF301-2P 連接器
d、將 NPN 晶體管和相應(yīng)的電阻器焊接到它的基極
e、焊接 L7805CV 5V 穩(wěn)壓器
f、將 arduino 上的3.3 伏穩(wěn)壓器焊接到 raspeberry pi TX 線上
g、將公針焊接到 arduino pro mini
h、根據(jù)fritzig原理圖焊接所有紅色(+)、黑色(-)和白色(信號(hào))細(xì)線
5. 連接器:
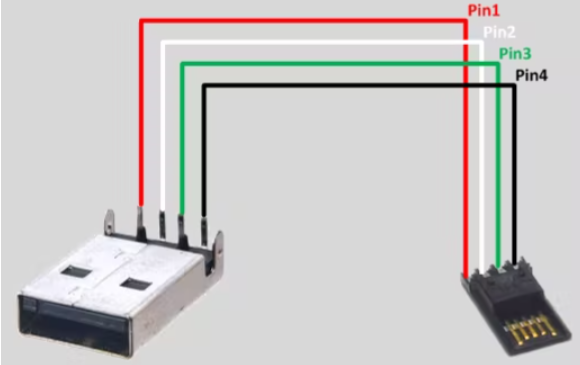
a、建立一個(gè)從 5V USB 電池組到樹(shù)莓派和 arduino 的連接器,您將需要一個(gè) A 型公 USB 連接器、一個(gè)公微型 USB 連接器黑色和紅色線、熱縮管和一個(gè)母到母面包板連接器。首先將母對(duì)母連接器一分為二,這些部分將進(jìn)入 arduino 負(fù)極和正極公針。A 型 USB 連接器將使用微型 USB 連接器向 arduino 和樹(shù)莓派供電。檢查圖像以焊接 USB 提示。
b、將 LiPo 電池的連接器連接到電子板,您將需要一個(gè) XT-60 母 LiPo 連接器、紅線和黑線、熱縮管和一個(gè)能夠處理 10 A 的小開(kāi)關(guān)。黑線將直接從XT-60到電子板(KF301-2P插入式螺絲連接器),紅線將通過(guò)小開(kāi)關(guān)連接
c、使用母 - 公面包板連接器將機(jī)器人的兩個(gè) IR 傳感器連接到 PCB 上相應(yīng)的母連接器
d、使用公母面包板連接器將 H 橋連接到 PCB 的 6 針母連接器
e.、將電機(jī)正極和負(fù)極端子連接到 H 橋
F、將 H 橋主電源連接到 PCB 上的 KF301-2P 插入式螺釘連接器
6.在將 arduino 放置到 PCB 之前,使用放大鏡和萬(wàn)用表仔細(xì)檢查所有內(nèi)容
第 4 步:Arduino 代碼
首先我需要回答一個(gè)重要的問(wèn)題:為什么必須存在一個(gè)中間 arduino 層而不是直接將 Pi 連接到電子設(shè)備?
1.更加模塊化,你可以在沒(méi)有PI的情況下在另一個(gè)項(xiàng)目中重復(fù)使用arduino機(jī)器人
2.為了安全起見(jiàn),更換 3 美元的 arduino pro mini 比更換 Pi(35 美元)便宜
3. arduino 不會(huì)像 pi 那樣受到操作系統(tǒng)的干擾,因此為電機(jī)實(shí)現(xiàn) PWM 控制會(huì)更有效,每秒輪詢前后傳感器幾次
4.如果python腳本中可能發(fā)生錯(cuò)誤,機(jī)器人可能會(huì)永遠(yuǎn)運(yùn)行,耗盡電池并可能損壞它或著火,如果??沒(méi)有監(jiān)督,在arduino草圖中它更可靠,因?yàn)樗灰蕾囉诓僮飨到y(tǒng)
5.解耦系統(tǒng)更容易調(diào)試
好的,所以我已經(jīng)涵蓋了為什么部分,我將稍微解釋一下 arduino 草圖。它基本上做了兩件事:
1.它接收來(lái)自串行線的電機(jī)和燈光命令并驅(qū)動(dòng)電機(jī)或切換燈光
例如:
* “ M:-25:16; ” 表示(-25 左)和(16 功率),它將轉(zhuǎn)換為左電機(jī) 17% 和右電機(jī) 32%,并且方向向前 * “ M:44:19; ” 表示(向右 44)和(19 功率)它將轉(zhuǎn)換為:左電機(jī) 38%,右電機(jī) 5% 和前進(jìn)方向
* “ L:1; ”表示燈亮,“ L:0 ”燈滅
2.它從機(jī)器人前后輪詢紅外傳感器,并通過(guò)串行線發(fā)送有關(guān)距離的數(shù)據(jù)
首先,您需要下載并安裝庫(kù),主要代碼位于 github 存儲(chǔ)庫(kù)中,你可以從本文下方復(fù)制粘貼它。
使用 FTDI 適配器將代碼上傳到 arduino。現(xiàn)在您可以向機(jī)器人發(fā)出命令以查看它的工作情況,為此只需連接第二條串行線并通過(guò)它發(fā)送電機(jī)或光。一種方法是使用 HC-05 之類的藍(lán)牙模塊,并使用藍(lán)牙應(yīng)用程序?qū)⑵溥B接到手機(jī)。然后給它像“L:1”這樣的串行命令
// source for TextMotorCommandsInterpretter: "https://github.com/danionescu0/arduino/tree/master/libraries/TextMotorCommandsInterpretter"?
#include
#include
const char MOTOR_COMMAND = 'M';?
const char LIGHT_COMMAND = 'L';?
/**?
* how long the motor command will take effect in ms?
* an incomming motor command will last for maxDurationForMottorCommand?
* if it's not going to be resetted by another motor command?
*/?
const long maxDurationForMottorCommand = 300;?
// adjust this value to limit robot speed?
const byte maxPwmValue = 230;?
// How long between successive distance transmissions in ms?
const long transmitingInterval = 500;?
const int maxObstacleDetection = 1000; // analog read max detection value?
const int minObstacleDetection = 500; // analog read min detection value?
const byte FLASH_PIN = 3;?
const byte RIGHT_MOTOR_PWM_PIN = 5;?
const byte RIGHT_MOTOR_EN1_PIN = A4;?
const byte RIGHT_MOTOR_EN2_PIN = A5;?
const byte LEFT_MOTOR_PWM_PIN = 6;?
const byte LEFT_MOTOR_EN1_PIN = A3;?
const byte LEFT_MOTOR_EN2_PIN = A2;?
const byte FRONT_DISTANCE_SENSOR = A0;?
const byte BACK_DISTANCE_SENSOR = A1;?
SoftwareSerial masterComm(11, 10); // RX, TX?
TextMotorCommandsInterpretter motorCommandsInterpretter(-50, 50, -50, 50);?
String currentCommand;?
long lastCheckedTime;?
long lastTransmitTime;?
boolean inMotion = false;?
void setup() ?
{?
? ?Serial.begin(9600);?
? ?masterComm.begin(9600);?
? ?masterComm.setTimeout(10); ??
? ?pinMode(FLASH_PIN, OUTPUT);?
? ?pinMode(LEFT_MOTOR_PWM_PIN, OUTPUT);?
? ?pinMode(LEFT_MOTOR_EN1_PIN, OUTPUT);?
? ?pinMode(LEFT_MOTOR_EN2_PIN, OUTPUT);?
? ?pinMode(RIGHT_MOTOR_PWM_PIN, OUTPUT);?
? ?pinMode(RIGHT_MOTOR_EN1_PIN, OUTPUT);?
? ?pinMode(RIGHT_MOTOR_EN2_PIN, OUTPUT);?
? ?lastCheckedTime = millis();?
? ?lastTransmitTime = millis();?
}?
void loop() ?
{?
? ?if (masterComm.available() > 0) { ? ?
? ? ? ?currentCommand = masterComm.readString();?
? ? ? ?processCommand();?
? ?}?
? ?if (inMotion && millis() - lastCheckedTime > maxDurationForMottorCommand) {?
? ? ? ?stopMotors();?
? ?}?
? ?if (millis() - lastTransmitTime > transmitingInterval) {?
? ? ? ?lastTransmitTime = millis();?
? ? ? ?masterComm.print(getObstacleData());?
? ? ? ?Serial.print(analogRead(BACK_DISTANCE_SENSOR));Serial.print("---");?
? ? ? ?Serial.println(getObstacleData());?
? ?}?
? ?/* FOR DEBUG?
? ?motorCommandsInterpretter.analizeText("M:-14:40;");?
? ?Serial.write("Left==");Serial.println(motorCommandsInterpretter.getPercentLeft());?
? ?Serial.write("Right==");Serial.println(motorCommandsInterpretter.getPercentRight()); ? ?
? ?delay(10000);*/?
}?
String getObstacleData()?
{?
? ?int frontDistance = analogRead(FRONT_DISTANCE_SENSOR);?
? ?int backDistace = analogRead(BACK_DISTANCE_SENSOR);?
? ?frontDistance = map(frontDistance, maxObstacleDetection, minObstacleDetection, 0, 10);?
? ?backDistace = map(backDistace, maxObstacleDetection, minObstacleDetection, 0, 10);?
? ?return String("F=" + String(frontDistance) + ":B=" + String(backDistace) + ";");?
}?
void processCommand() ?
{?
? ?switch (currentCommand.charAt(0)) {?
? ? ? ?case (MOTOR_COMMAND):?
? ? ? ? ? ?steerCar();?
? ? ? ? ? ?break;?
? ? ? ?case (LIGHT_COMMAND):?
? ? ? ? ? ?toggleLight(currentCommand.charAt(2));?
? ? ? ? ? ?break;?
? ?}?
}?
void steerCar() ?
{?
? ?motorCommandsInterpretter.analizeText(currentCommand);?
? ?float percentLeftMotor = motorCommandsInterpretter.getPercentLeft();?
? ?float percentRightMotor = motorCommandsInterpretter.getPercentRight();?
? ?Serial.write("Left=");Serial.println(percentLeftMotor);?
? ?Serial.write("Right=");Serial.println(percentRightMotor);?
? ?setMotorsDirection(motorCommandsInterpretter.getDirection());?
? ?analogWrite(LEFT_MOTOR_PWM_PIN, percentLeftMotor * maxPwmValue);?
? ?analogWrite(RIGHT_MOTOR_PWM_PIN, percentRightMotor * maxPwmValue); ? ??
? ?inMotion = true;?
? ?lastCheckedTime = millis();?
}?
void setMotorsDirection(boolean forward)?
{?
? ?if (forward) {?
? ? ? ?digitalWrite(LEFT_MOTOR_EN1_PIN, HIGH);?
? ? ? ?digitalWrite(LEFT_MOTOR_EN2_PIN, LOW);?
? ? ? ?digitalWrite(RIGHT_MOTOR_EN1_PIN, HIGH);?
? ? ? ?digitalWrite(RIGHT_MOTOR_EN2_PIN, LOW);?
? ?} else {?
? ? ? ?digitalWrite(LEFT_MOTOR_EN1_PIN, LOW);?
? ? ? ?digitalWrite(LEFT_MOTOR_EN2_PIN, HIGH);?
? ? ? ?digitalWrite(RIGHT_MOTOR_EN1_PIN, LOW);?
? ? ? ?digitalWrite(RIGHT_MOTOR_EN2_PIN, HIGH);?
? ?}?
}?
void stopMotors()?
{?
? ?Serial.println("Stopping motors");?
? ?analogWrite(LEFT_MOTOR_PWM_PIN, 0);?
? ?analogWrite(RIGHT_MOTOR_PWM_PIN, 0);?
? ?inMotion = false;?
}?
void toggleLight(char command)?
{?
? ?Serial.println("Toggle light");?
? ?if (command == '1') {?
? ? ? ?digitalWrite(FLASH_PIN, HIGH);?
? ?} else {?
? ? ? ?digitalWrite(FLASH_PIN, LOW);?
? ?}?
}??
第 5 步:安裝和配置 Raspberry Pi 項(xiàng)目和依賴項(xiàng)
它是如何工作的:
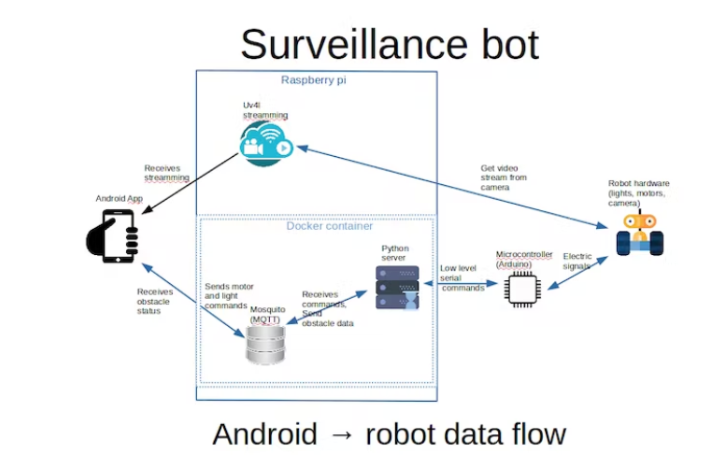
a、android 應(yīng)用程序在 web 視圖中顯示 uv4l 流。uv4l 進(jìn)程在樹(shù)莓派上運(yùn)行,從攝像頭捕獲視頻輸入并將其流式傳輸。這是一個(gè)很棒的工具,具有許多功能
b、使用 android 應(yīng)用程序中的控件將燈和引擎命令發(fā)送到 MQTT 服務(wù)器
c、樹(shù)莓派上 docker 容器內(nèi)的 python 服務(wù)器偵聽(tīng) MQTT 命令并使用串行接口將它們傳遞給 arduino。arduino 板控制電機(jī)和燈。
d、arduino 感知機(jī)器人前后的距離,并通過(guò)串行接口將數(shù)據(jù)發(fā)送到 python 服務(wù)器,python 將它們轉(zhuǎn)發(fā)到 MQTT,它們被 android 接口拾取并顯示給用戶
首先需要在樹(shù)莓派上完全安裝和配置 Raspbian,并且相機(jī)需要進(jìn)行心理連接和配置。此外,所有配置都將使用 ssh 完成,因此配置它是一件便利的功能。
如果您希望在 wifi 外部使用 android 應(yīng)用程序控制您的機(jī)器人,您應(yīng)該考慮在您的 wifi 路由器上進(jìn)行端口轉(zhuǎn)發(fā),否則您將被限制在 wifi 內(nèi)使用您的本地 IP 地址。
要在樹(shù)莓派上找到您的本地 IP 地址,請(qǐng)使用“ifconfig”:
ifconfig?
.........?
eth0 ? ? ??
Link encap:Ethernet ?HWaddr b8:27:eb:16:e7:ff ??
? ? ? ? ?inet6 addr: fe80::ff00:f22f:9258:b92b/64 Scope:Link?
? ? ? ? ?UP BROADCAST MULTICAST ?MTU:1500 ?Metric:1?
? ? ? ? ?RX packets:0 errors:0 dropped:0 overruns:0 frame:0?
? ? ? ? ?TX packets:0 errors:0 dropped:0 overruns:0 carrier:0?
? ? ? ? ?collisions:0 txqueuelen:1000 ?
? ? ? ? ?RX bytes:0 (0.0 B) ?TX bytes:0 (0.0 B)?
........?
wlan0 ? ? Link encap:Ethernet ?HWaddr 00:c1:41:00:10:f6 ??
? ? ? ? ?inet addr:192.168.0.102 ?Bcast:192.168.0.255 ?Mask:255.255.255.0?
? ? ? ? ?inet6 addr: fe80::e1f4:5112:9cb2:3839/64 Scope:Link?
? ? ? ? ?UP BROADCAST RUNNING MULTICAST ?MTU:1500 ?Metric:1?
? ? ? ? ?RX packets:1678396 errors:0 dropped:0 overruns:0 frame:0?
? ? ? ? ?TX packets:381859 errors:0 dropped:0 overruns:0 carrier:0?
? ? ? ? ?collisions:0 txqueuelen:1000 ?
? ? ? ? ?RX bytes:259428527 (247.4 MiB) ?TX bytes:187573084 (178.8 MiB)?
.....??
在我們的例子中是“192.168.0.102”
要轉(zhuǎn)發(fā)的端口(默認(rèn))是:9090 用于 uv4l,1883 用于 mosquitto。如果這些端口被 Internet 提供商防火墻或其他端口禁止,您可以將此端口轉(zhuǎn)發(fā)到相同的輸出端口。
端口轉(zhuǎn)發(fā)在每個(gè)路由器上都有不同的做法,這里有一些教程:this,您也可以嘗試在 google 上搜索“ port forwarding your_router_model ”以查看更多相關(guān)結(jié)果。
文件夾位置很重要,因?yàn)樵?docker-compose.yml 中,該位置被硬編碼為:/home/pi/robot-camera-platform:/root/debug 如果您需要更改位置,請(qǐng)更改 docker-compose 中的值也
git clone https://github.com/danionescu0/robot-camera-platform.git
安裝 Uv4l 流媒體:
chmod +x uv4l/install.sh
chmod +x uv4l/start.sh
sh 。/uv4l/install.sh
第 6 步:配置和構(gòu)建 Android 應(yīng)用程序
我們已經(jīng)完成了大部分工作,在這一步中,我們將安裝 android 應(yīng)用程序。這些都是先決條件:
1.克隆github項(xiàng)目:
git clone https://github.com/danionescu0/android-robot-camera
接下來(lái)的步驟涉及設(shè)置您的環(huán)境,我將列舉它們并提供指向?qū)iT(mén)教程的鏈接,以防您不知道如何操作。
2.在您的安卓手機(jī)上啟用開(kāi)發(fā)者選項(xiàng)。您可以在此處了解更多信息:https://developer.android.com/studio/debug/dev-opt.。.
3.下載并安裝Android studio:https://developer.android.com/studio/index.html?ut.。.這個(gè)https://www.javaworld.com/article/3095406/android/。..
4.導(dǎo)入項(xiàng)目:https://developer.android.com/studio/intro/migrate.。.
現(xiàn)在我們要配置流和 MQTT 憑據(jù):
5.編輯。/app/src/main/values/passwords.xml并配置 MQTT 和流式傳輸
MQTT 主機(jī)應(yīng)該類似于:1883
流媒體主機(jī)應(yīng)該是這樣的:
6.上傳并運(yùn)行應(yīng)用程序
第 7 步:使用機(jī)器人和調(diào)試
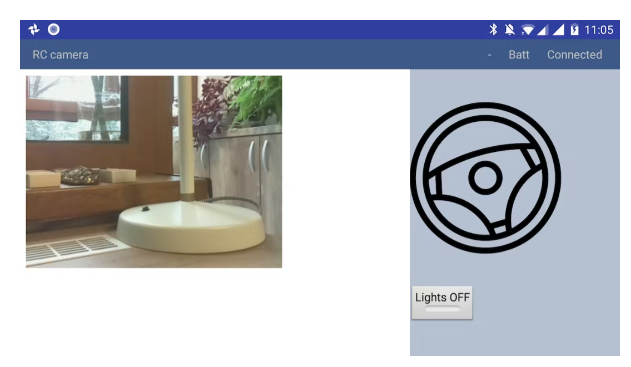
使用應(yīng)用程序
該應(yīng)用程序只有一個(gè)主屏幕,在屏幕左側(cè)顯示流媒體圖像,在右側(cè)有控制界面。主控是方向盤(pán),按您希望機(jī)器人移動(dòng)的方向觸摸方向盤(pán)。方向盤(pán)下方有一個(gè)大燈按鈕,輕觸可切換燈光。
在右上角有一個(gè)文本,如:“- Batt Connected”。
*第一個(gè)破折號(hào)表示沒(méi)有障礙物,如果機(jī)器人前面或后面有障礙物,它將用一個(gè)指向前面或后面的小箭頭發(fā)出信號(hào)。
* “Batt”狀態(tài)尚未實(shí)現(xiàn)。
* “Connected” 表示 MQTT 服務(wù)器已連接,因此機(jī)器人可以使用,其他可能的值為 “Disconnected”
可以在多個(gè)層上進(jìn)行調(diào)試:
1.在arduino層
- 將 FTDI 適配器連接到筆記本電腦的第二條串行線(RX 連接到引腳 11,TX 連接到引腳 10)并發(fā)出電機(jī)命令和燈光命令以查看機(jī)器人是否響應(yīng)這些命令
- 仔細(xì)檢查連接,如果電機(jī)向后移動(dòng),則將兩條電機(jī)線反向,如果一個(gè)電機(jī)向后移動(dòng),則將其線反向
- 檢查 arduino 是否正確連接到 H 橋
2. 在樹(shù)莓派層上
- 檢查 docker 是否正在運(yùn)行兩個(gè)容器(mosquitto 和 python 服務(wù)器)
pi@raspberrypi:~ $ docker ps?
CONTAINER ID ? ? ? ?IMAGE ? ? ? ? ? ? ? ? ? ? ? ? ? COMMAND ? ? ? ? ? ? ? ? ?CREATED ? ? ? ? ? ? STATUS ? ? ? ? ? ? ?PORTS ? ? ? ? ? ? ? ? ? ?NAMES?
473a56da2230 ? ? ? ?dockercontainer_python-server ? "python /root/debu..." ? 9 months ago ? ? ? ?Up 4 hours ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? dockercontainer_python-server_1?
3e0b1933d310 ? ? ? ?robot-camera-mosquitto ? ? ? ? ?"/usr/bin/entry.sh..." ? 9 months ago ? ? ? ?Up 4 hours ? ? ? ? ?0.0.0.0:1883->1883/tcp ? dockercontainer_mosquitto_1 ?
- 檢查進(jìn)程是否在指定端口上運(yùn)行,您應(yīng)該尋找 9090和 1883
pi@raspberrypi:~ $ netstat -nltp?
(Not all processes could be identified, non-owned process info?
will not be shown, you would have to be root to see it all.)?
Active Internet connections (only servers)?
Proto Recv-Q Send-Q Local Address ? ? ? ? ? Foreign Address ? ? ? ? State ? ? ? PID/Program name?
tcp ? ? ? ?0 ? ? ?0 0.0.0.0:9090 ? ? ? ? ? ?0.0.0.0:* ? ? ? ? ? ? ? LISTEN ? ? ?- ? ? ? ? ? ? ? ?
tcp ? ? ? ?0 ? ? ?0 0.0.0.0:5900 ? ? ? ? ? ?0.0.0.0:* ? ? ? ? ? ? ? LISTEN ? ? ?- ? ? ? ? ? ? ? ?
tcp ? ? ? ?0 ? ? ?0 0.0.0.0:8080 ? ? ? ? ? ?0.0.0.0:* ? ? ? ? ? ? ? LISTEN ? ? ?- ? ? ? ? ? ? ? ?
tcp ? ? ? ?0 ? ? ?0 0.0.0.0:22 ? ? ? ? ? ? ?0.0.0.0:* ? ? ? ? ? ? ? LISTEN ? ? ?- ? ? ? ? ? ? ? ?
tcp6 ? ? ? 0 ? ? ?0 :::1883 ? ? ? ? ? ? ? ? :::* ? ? ? ? ? ? ? ? ? ?LISTEN ? ? ?- ? ? ? ? ? ? ? ?
tcp6 ? ? ? 0 ? ? ?0 :::5900 ? ? ? ? ? ? ? ? :::* ? ? ? ? ? ? ? ? ? ?LISTEN ? ? ?- ? ? ? ? ? ? ? ?
tcp6 ? ? ? 0 ? ? ?0 :::22 ? ? ? ? ? ? ? ? ? :::* ? ? ? ? ? ? ? ? ? ?LISTEN ? ? ?-?
- 檢查串口是否存在并且它在項(xiàng)目config.py中指定
pi@raspberrypi:~ $ ls -l /dev/ttyS0?
crw-rw---- 1 root dialout 4, 64 Jan 14 19:59 /dev/ttyS0?
- 停止 docker 進(jìn)程并使用picocom手動(dòng)連接到串口
然后直接發(fā)出電機(jī)和燈光指令,看機(jī)器人是否響應(yīng)
sudo systemctl start robot-camera.service?
picocom -b 9600 /dev/ttyS0?
# now issue motor and light commands to test the robot?
- 檢查樹(shù)莓派上的串行控制臺(tái)是否已停用
- 檢查流媒體和 MQTT 是否可以在樹(shù)莓派外部訪問(wèn),起訴 mosquitto 客戶端(用于 MQTT)并在 Web 瀏覽器中檢查流媒體)
3.Android應(yīng)用層
- 檢查所有必要步驟以使手機(jī)進(jìn)入調(diào)試模式
- 確保您已在 passwords.xml 中正確設(shè)置密碼和端點(diǎn)
- 檢查流媒體和 MQTT 是否可以在樹(shù)莓派外部訪問(wèn),起訴 mosquitto 客戶端(用于 MQTT)并在 Web 瀏覽器中檢查流媒體)
- 查看應(yīng)用程序的右上角并檢查“已連接”
- 使用 android 調(diào)試器檢查錯(cuò)誤









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論