I2C 和SPI協(xié)議通常應(yīng)用在電子控制單元(ECU)的芯片間通信。對(duì)于各種汽車(chē)子系統(tǒng)(例如舒適性控制系統(tǒng)、防盜鎖、傳動(dòng)系統(tǒng)和引擎控制)之間的長(zhǎng)距離串行通信和控制,CAN、LIN和FlexRay協(xié)議是當(dāng)今汽車(chē)行業(yè)中最常見(jiàn)的串行總線(xiàn)應(yīng)用。
2016-01-29 11:47:06 5300
5300 隨著新能源汽車(chē)列入國(guó)家加快培育和發(fā)展的七大戰(zhàn)略性新興產(chǎn)業(yè),汽車(chē)的智能化、數(shù)字網(wǎng)絡(luò)化、節(jié)能化成了汽車(chē)發(fā)展的大方向。汽車(chē)總線(xiàn)是實(shí)現(xiàn)數(shù)字網(wǎng)絡(luò)化的基礎(chǔ),本文將和大家聊聊當(dāng)今汽車(chē)三大總線(xiàn),CAN、LIN、Flexray。
2016-02-17 11:02:3957274 
有了CAN為什么還會(huì)有LIN,CAN和LIN的區(qū)別,LIN的優(yōu)勢(shì)在哪?
2020-05-04 09:25:00114274 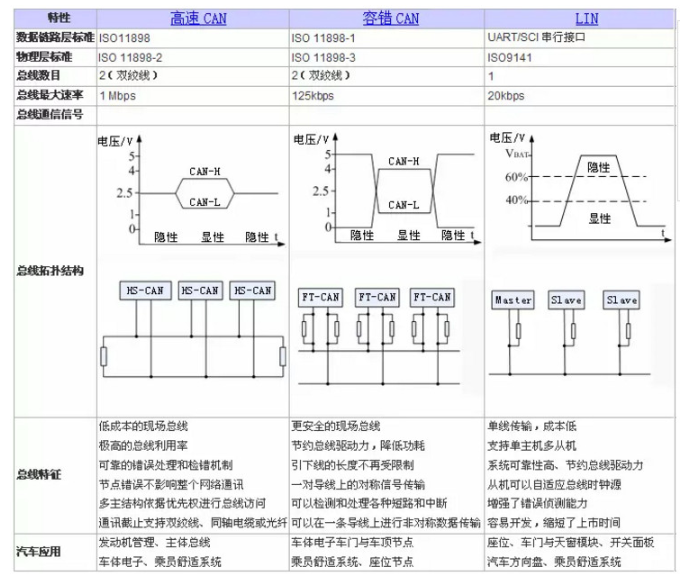
LIN總線(xiàn)是目前常見(jiàn)的一種A類(lèi)網(wǎng)絡(luò)協(xié)議。LIN的全稱(chēng)為L(zhǎng)ocal Interconnect Network。LIN主要功能是為CAN總線(xiàn)網(wǎng)絡(luò)提供輔助功能,應(yīng)用場(chǎng)合有智能傳感節(jié)點(diǎn)、自動(dòng)車(chē)窗節(jié)點(diǎn)等。目前
2020-10-22 12:21:4820083 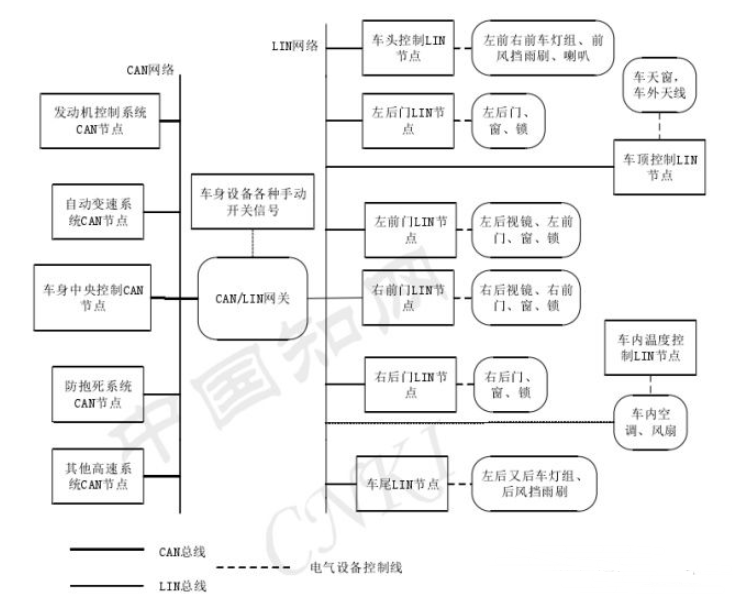
前幾天小編畫(huà)點(diǎn)時(shí)間看了一些關(guān)于LIN總線(xiàn)基礎(chǔ)的內(nèi)容,把其中的關(guān)鍵點(diǎn)提取了出來(lái),在這里分享給大家。在這里你可能要問(wèn)“不都有CAN總線(xiàn)了嗎?這個(gè)LIN總線(xiàn)又是從哪里來(lái)的?”其實(shí)理由很簡(jiǎn)單,就是CAN總線(xiàn)
2022-09-15 10:51:332670 LIN網(wǎng)絡(luò)作為串行通訊網(wǎng)絡(luò),用于實(shí)現(xiàn)汽車(chē)中的分布式電子系統(tǒng)控制,它是現(xiàn)有汽車(chē)CAN網(wǎng)絡(luò)功能的補(bǔ)充。LIN總線(xiàn)有效降低了汽車(chē)制造成本,提升了系統(tǒng)結(jié)構(gòu)的靈活性,并且無(wú)論從硬件還是軟件的角度而言,都為網(wǎng)絡(luò)節(jié)點(diǎn)提供了相互操作性。
2022-09-21 15:30:49900 低速CAN總線(xiàn)上為顯性電平(邏輯0)時(shí),CAN_H為3.6V、CAN_L為1.4V,此時(shí)電壓差是2.2V。
2022-10-12 10:18:296268 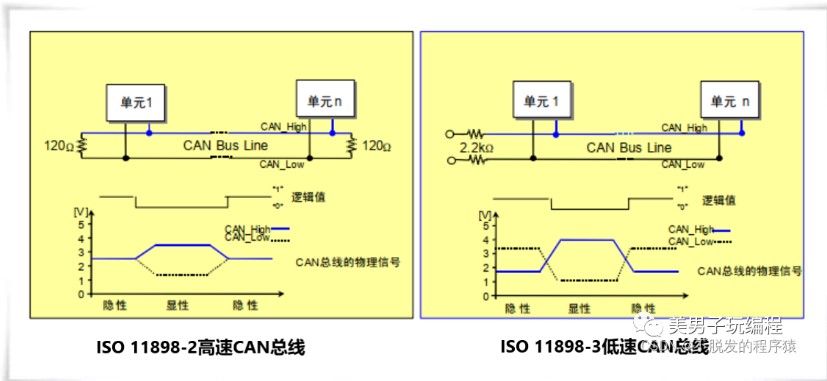
在ISO 11898-2和ISO 11898-3中分別規(guī)定了兩種CAN總線(xiàn)結(jié)構(gòu)(在BOSCH CAN2.0規(guī)范中,并沒(méi)有關(guān)于總線(xiàn)拓?fù)浣Y(jié)構(gòu)的說(shuō)明):高速CAN總線(xiàn)和低速CAN總線(xiàn),區(qū)別表如下所示。
2023-04-07 09:30:181836 
大家好,本合集將系統(tǒng)帶領(lǐng)大家一起深入學(xué)習(xí)LIN總線(xiàn)協(xié)議。如果您有興趣請(qǐng)持續(xù)關(guān)注本公眾號(hào)《LIN總線(xiàn)協(xié)議合集》。
2023-07-10 09:48:501017 
LIN的全稱(chēng)為L(zhǎng)ocal Interconnect Network。LIN主要功能是為CAN總線(xiàn)網(wǎng)絡(luò)提供輔助功能,應(yīng)用場(chǎng)合有智能傳感節(jié)點(diǎn)、自動(dòng)車(chē)窗節(jié)點(diǎn)等。
2023-11-08 15:19:351014 
這意味著變送器通過(guò)CAN收發(fā)器改變總線(xiàn)電平,并將其信息傳輸?shù)?b class="flag-6" style="color: red">CAN總線(xiàn)。接收器通過(guò)監(jiān)測(cè)總線(xiàn)電平將總線(xiàn)上的信息讀取到自己的CAN收發(fā)器中。
2024-02-19 14:53:54606 
LIN(Local Interconnect Network)是一種低成本的串行通訊網(wǎng)絡(luò),用于實(shí)現(xiàn)汽車(chē)中的分布式電子系統(tǒng)控制。LIN 的目標(biāo)是為現(xiàn)有汽車(chē)網(wǎng)絡(luò)(例如CAN 總線(xiàn))提供輔助功能,因此LIN 總線(xiàn)是一種輔助的
2011-10-03 11:19:297122 
電子發(fā)燒友網(wǎng)報(bào)道(文/李寧遠(yuǎn))汽車(chē)智能化、電動(dòng)化的發(fā)展趨勢(shì)下,現(xiàn)在的車(chē)輛包含了許多總線(xiàn)網(wǎng)絡(luò)。LIN總線(xiàn)是汽車(chē)分布式電子系統(tǒng)中一種低成本的串行通訊網(wǎng)絡(luò),作為CAN、CAN FD等其他網(wǎng)絡(luò)的補(bǔ)充出現(xiàn)
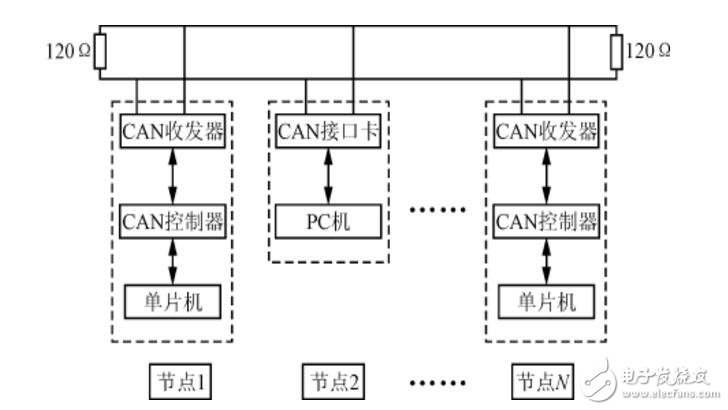
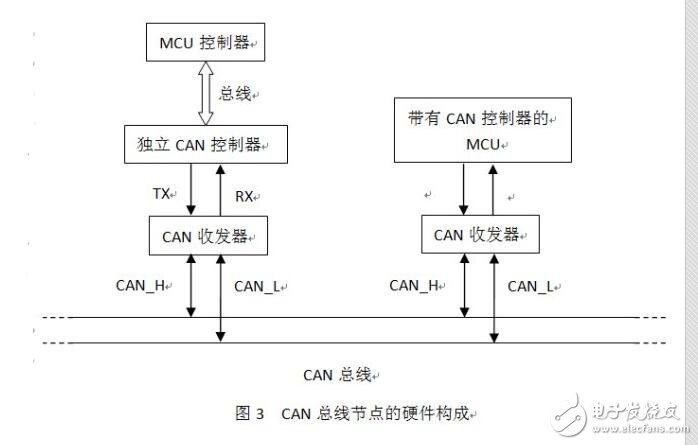
2022-11-01 01:28:001721 常見(jiàn)問(wèn)題分析。CAN總線(xiàn)和UART、I2C、SPI總線(xiàn)最大的區(qū)別主要在于取消了傳統(tǒng)的地址編碼方式,理論上講總線(xiàn)上的互聯(lián)節(jié)點(diǎn)數(shù)不受限制,擁有強(qiáng)大的握手與出錯(cuò)管理及重發(fā)機(jī)制,具有很強(qiáng)的抗干擾能力。STM32 CAN 基礎(chǔ)內(nèi)容CAN網(wǎng)絡(luò)中主要由CAN控制器和CAN收發(fā)器組成,大部分STM32內(nèi)部都集成了C
2021-08-19 07:41:06
現(xiàn)場(chǎng)總線(xiàn)VS工業(yè)以太網(wǎng)現(xiàn)場(chǎng)總線(xiàn)CAN總線(xiàn)(Control Area Network)一、CAN總線(xiàn)是什么?CAN總線(xiàn)的作用?CAN總線(xiàn)的優(yōu)點(diǎn)CAN總線(xiàn)拓?fù)鋱D各接口協(xié)議速率對(duì)比
2021-08-06 07:44:19
一、大致框架CAN總線(xiàn)的系統(tǒng)架構(gòu),CAN總線(xiàn)上掛在相應(yīng)的設(shè)備節(jié)點(diǎn)。這些設(shè)備節(jié)點(diǎn)包含:最底層也就是物理層的CAN收發(fā)器(和本次使用CAN收發(fā)器有所區(qū)別,僅供參考)。信息協(xié)議層也就是CAN控制器(和本次
2021-08-19 06:47:56
LIN總線(xiàn)入門(mén)實(shí)用教程,初學(xué)者不錯(cuò)的選擇。
2016-08-04 17:24:07
汽車(chē)CAN總線(xiàn)實(shí)驗(yàn)教學(xué)系統(tǒng)——LIN的協(xié)議是開(kāi)放的,任何組織和個(gè)人無(wú)需支付費(fèi)用即可獲取。LIN規(guī)范包括三個(gè)主要部分:LIN協(xié)議規(guī)范部分(說(shuō)明LIN的物理層和數(shù)據(jù)鏈路層)、LIN配置語(yǔ)言部分(說(shuō)明
2015-07-17 14:05:59
LIN總線(xiàn)的主要特性是什么?
2021-12-13 06:08:48
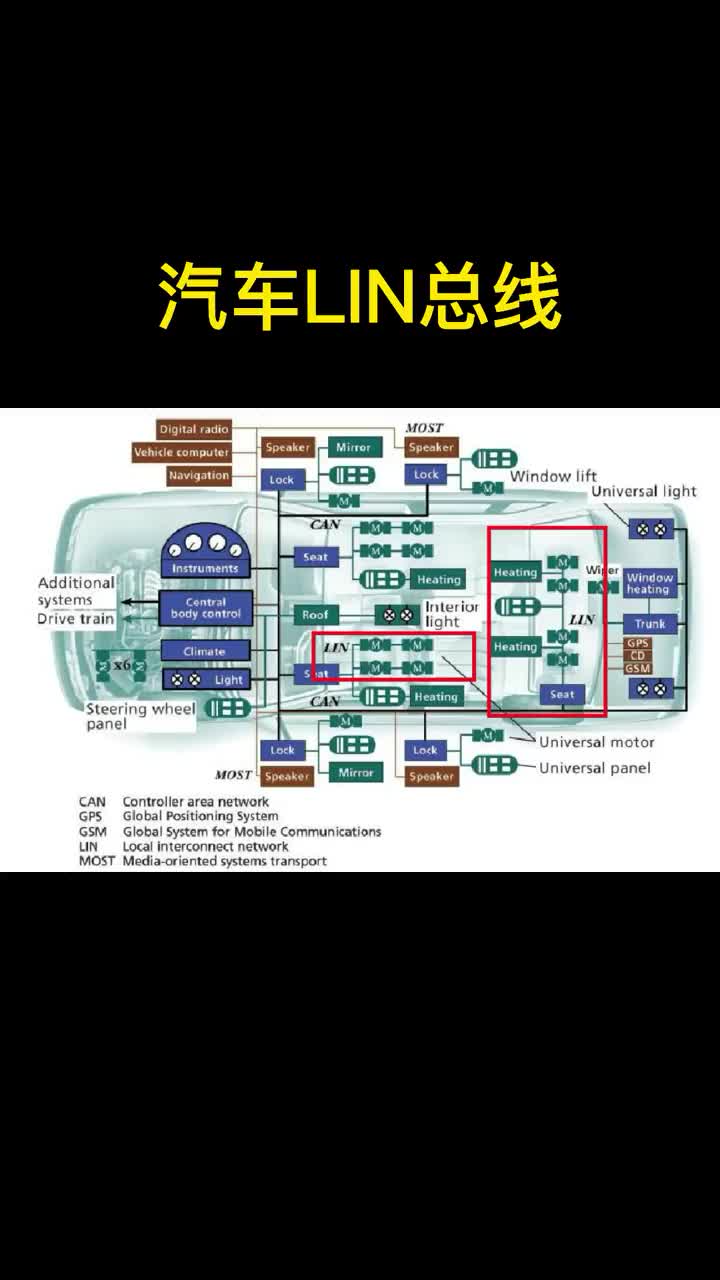
汽車(chē)電子總線(xiàn)設(shè)計(jì),一般都采用LIN總線(xiàn)和CAN總線(xiàn)這兩種形式。 LIN總線(xiàn)的應(yīng)用 LIN總線(xiàn),一般用在結(jié)構(gòu)、功能簡(jiǎn)單,實(shí)時(shí)性要求低和成本敏感的場(chǎng)合。比如,電動(dòng)門(mén)窗、天窗、雨刷、車(chē)燈、空調(diào)
2021-02-20 16:26:24
一幀所攜帶的數(shù)據(jù)。2、如下圖為一個(gè)LIN節(jié)點(diǎn)的層次結(jié)構(gòu)圖:LIN1.3與LIN2.1的區(qū)別在于,LIN1.3沒(méi)有TL層,Signal interaction放在Protocol層中,沒(méi)有單獨(dú)的TP層。3、LIN總線(xiàn)特點(diǎn):串行通信:線(xiàn)間干擾小,節(jié)省線(xiàn)束,傳輸距離長(zhǎng);..
2021-12-09 07:49:55
Lin總線(xiàn)接口;USB接口符合USB2.0規(guī)范,即插即用;U2carbus自帶12V電池電源發(fā)生器用于單線(xiàn)can總線(xiàn)和Lin總線(xiàn)接口芯片供電,和其他設(shè)備通信時(shí)可不連接電池電源線(xiàn);配套的免費(fèi)數(shù)據(jù)調(diào)試軟件
2014-05-06 13:38:41
rs485與can總線(xiàn)的區(qū)別,CAN總線(xiàn)特點(diǎn):1、國(guó)際標(biāo)準(zhǔn)的工業(yè)級(jí)現(xiàn)場(chǎng)總線(xiàn),傳輸可靠,實(shí)時(shí)性高;2、傳輸距離遠(yuǎn)(最遠(yuǎn)10Km),傳輸速率快(最高1MHz bps);3、單條總線(xiàn)最多可接110個(gè)節(jié)點(diǎn)
2021-07-19 06:07:04
使用 SCI0 和 SCI1 作為 Lin 總線(xiàn)。所以我更改了 .npf 文件。
3.CANoe無(wú)法從開(kāi)發(fā)板獲取任何信號(hào)。
Demo板和我的板有很大區(qū)別。演示板使用 MC33905S 用于 LIN 總線(xiàn)
2023-06-01 06:14:17
基于CAN/LIN總線(xiàn)的汽車(chē)混合網(wǎng)關(guān)該怎樣去設(shè)計(jì)?如何對(duì)汽車(chē)混合網(wǎng)關(guān)進(jìn)行測(cè)試驗(yàn)證?
2021-05-14 06:07:54
基于CAN_LIN總線(xiàn)的混合網(wǎng)關(guān)設(shè)計(jì)
2012-08-20 10:03:53
總線(xiàn)!本文關(guān)注點(diǎn):有了CAN為什么還會(huì)有LIN,CAN和LIN的區(qū)別,LIN的優(yōu)勢(shì)在哪?1. 什么是LIN總線(xiàn)?LIN(Local Interconnect Network)總線(xiàn)是基于UART/SCI
2020-11-05 15:22:40
`汽車(chē)網(wǎng)絡(luò)通信中除了CAN的通信方式外,還有另外一種低成本通信方式——LIN系統(tǒng)。它的英文是“Local Interconnect Network”,LIN總線(xiàn)基于UART/SCI(通用異步收發(fā)器
2020-08-07 18:15:07
CAN總線(xiàn)的實(shí)時(shí)性能非常必要。于是,傳統(tǒng)CAN與時(shí)間觸發(fā)機(jī)制相結(jié)合產(chǎn)生了TTCAN(Time-Triggered CAN)。 TTCAN總線(xiàn)和傳統(tǒng)CAN總線(xiàn)系統(tǒng)的區(qū)別是:總線(xiàn)上不同的信息定義了
2015-06-24 13:56:39
120歐姆的磁珠合適嗎?會(huì)不會(huì)減弱總線(xiàn)信號(hào)呢?具體的選型應(yīng)該怎么看啊?下面是我的LIN網(wǎng)絡(luò)和CAN網(wǎng)絡(luò):
2017-04-25 08:25:19
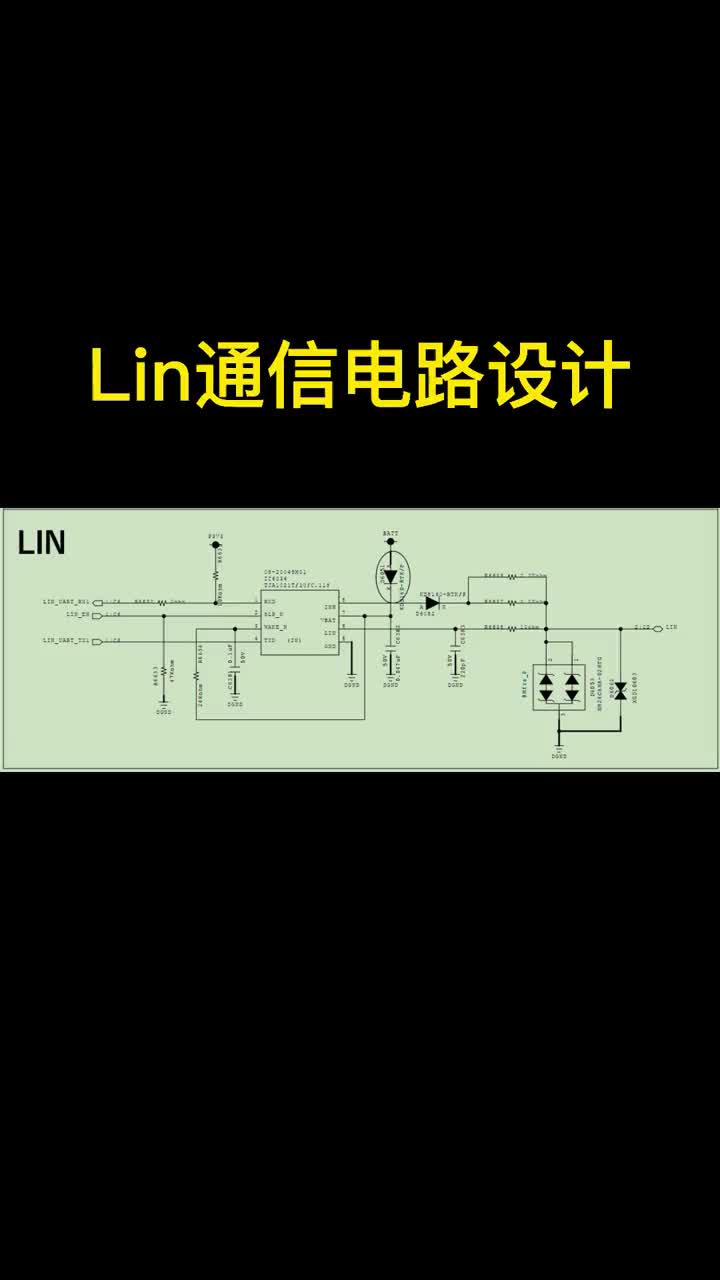
LIN總線(xiàn)主要特性是什么?LIN網(wǎng)絡(luò)在汽車(chē)電子控制解決方案中的應(yīng)用是什么?如何去設(shè)計(jì)LIN總線(xiàn)與MCU的接口?
2021-05-19 06:33:10
介紹了一個(gè)專(zhuān)門(mén)為以PLC為核心控制器的電梯控制系統(tǒng)而設(shè)計(jì)開(kāi)發(fā)的電梯通信系統(tǒng)。對(duì)起源于汽車(chē)工業(yè)的總線(xiàn)技術(shù)CAN總線(xiàn)和LIN總線(xiàn)進(jìn)行了研究,說(shuō)明了CAN總線(xiàn)、LIN總線(xiàn)在電梯通信系統(tǒng)
2009-03-17 10:56:44 25
25 結(jié)合具體車(chē)型,提出了一種基于CAN/LIN 總線(xiàn)的車(chē)身功率模塊解決方案。并針對(duì)負(fù)載的不同特性,給出了相應(yīng)的方案設(shè)計(jì)。在該方案中控制器選用的是MC68HC908GZ32
和MC68HC908EY16。
2009-05-27 15:51:2928 對(duì)CAN(Controller Area Network)/LIN(Local Interconnect Network)總線(xiàn)做了詳細(xì)介紹,設(shè)計(jì)了汽車(chē)CAN節(jié)點(diǎn)、LIN節(jié)點(diǎn)硬件電路,完成了CAN/LIN網(wǎng)關(guān)的硬件設(shè)計(jì),LIN設(shè)計(jì)目標(biāo)作為CAN的下層網(wǎng)絡(luò),同CAN相結(jié)合構(gòu)成汽
2010-07-13 17:10:3113 摘 要:隨著車(chē)內(nèi)電控單元的增加,車(chē)內(nèi)通訊網(wǎng)絡(luò)也日趨多樣化。LIN總線(xiàn)以其通訊成本低,開(kāi)發(fā)方便等優(yōu)勢(shì)在車(chē)身控制方面有著良好的應(yīng)用前景。本文對(duì)LIN總線(xiàn)進(jìn)行了
2006-03-11 13:45:201709 
綜合CAN和LIN通信功能的TPMS系統(tǒng)設(shè)計(jì)和應(yīng)用
引言
本文通過(guò)TPMS在國(guó)外某車(chē)型上的設(shè)計(jì)和應(yīng)用,詳細(xì)介紹TPMS軟硬件設(shè)計(jì)方法。本方案中綜合了CAN、LIN總線(xiàn)的設(shè)計(jì)
2009-11-18 10:41:042705 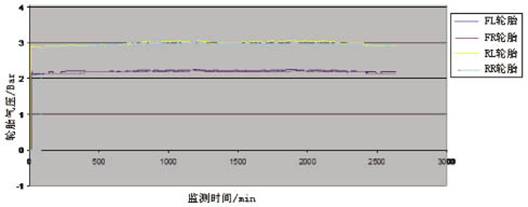
基于CAN/LIN總線(xiàn)的車(chē)身網(wǎng)絡(luò)中央控制器設(shè)計(jì)
?1 前言
??? 隨著對(duì)車(chē)輛舒適性要求的提高和更多輔助智能功能的出現(xiàn),ECU單元
2010-03-11 15:45:20712 汽車(chē)CAN/LIN總線(xiàn)測(cè)試流程和測(cè)試工具解析
汽車(chē)CAN/LIN總線(xiàn)系統(tǒng)測(cè)試的關(guān)鍵是測(cè)試流程、測(cè)試標(biāo)準(zhǔn)和測(cè)試工具,掌握專(zhuān)業(yè)的總線(xiàn)分析和測(cè)試工具的使用技
2010-03-19 10:44:488041 飛思卡爾LIN總線(xiàn)解
2011-01-06 16:10:30107 can總線(xiàn)在汽車(chē)網(wǎng)絡(luò)中的應(yīng)用雖效率顯著單成本過(guò)高,LIN線(xiàn)恰好彌補(bǔ)這一不足,本文對(duì)比了CAN/LIN總線(xiàn)的性能特點(diǎn),分別闡述了單CAN及單LIN網(wǎng)絡(luò)控制的缺陷,最后混合網(wǎng)絡(luò)控制方案
2011-06-09 17:34:16108 文中分析了CAN總線(xiàn)的發(fā)展和汽車(chē)CAN總線(xiàn)技術(shù)的特征,對(duì)CAN總線(xiàn)在汽車(chē)領(lǐng)域的應(yīng)用進(jìn)行了深入的探討。
2011-12-14 14:58:1084 串行總線(xiàn)的分析功能分為兩個(gè)部分,總線(xiàn)觸發(fā)和總線(xiàn)分析。DLM2000支持標(biāo)準(zhǔn)的CAN/LIN/I2C/SPI/UART總線(xiàn)觸發(fā)
2012-04-07 15:14:421430 
本設(shè)計(jì)是基于 CAN/LIN 總線(xiàn)式的汽車(chē) BCM 系統(tǒng),該系統(tǒng)主要由開(kāi)關(guān)信號(hào)輸入和輸出控制組成,輸入包括一系列開(kāi)關(guān)信號(hào)和脈沖信號(hào),輸出控制包括門(mén)鎖、燈光、車(chē)窗、報(bào)警器等控制,通過(guò) LIN 總線(xiàn)與車(chē)窗節(jié)點(diǎn)進(jìn)行通信。
2017-09-05 14:17:4226 LIN總線(xiàn)作為CAN總線(xiàn)的有效補(bǔ)充,在低端車(chē)聲電子領(lǐng)域替代CAN總線(xiàn),既能滿(mǎn)足功能要求,又能節(jié)約成本,在對(duì)成本更加敏感的國(guó)產(chǎn)車(chē)上得到大規(guī)模應(yīng)用。不同于CAN總線(xiàn)有專(zhuān)門(mén)的協(xié)議驅(qū)動(dòng)器,用戶(hù)不用管理底層
2017-09-07 10:27:0910 局域互聯(lián)網(wǎng)(LIN)是一種低成本的嵌入式網(wǎng)絡(luò)標(biāo)準(zhǔn),用于連接智能設(shè)備。LIN最常見(jiàn)于汽車(chē)工業(yè)。局域互聯(lián)網(wǎng)(LIN)總線(xiàn)是為汽車(chē)網(wǎng)絡(luò)開(kāi)發(fā)的一種低成本、低端多路復(fù)用通信標(biāo)準(zhǔn)。雖然控制器局域網(wǎng)(CAN)總線(xiàn)
2017-11-16 17:15:0123423 本系統(tǒng)干線(xiàn)采用CAN總線(xiàn),支線(xiàn)采用LIN總線(xiàn)。CAN總線(xiàn)具有很高的可靠性,高速、長(zhǎng)距離傳輸,開(kāi)發(fā)系統(tǒng)廉價(jià),其特有的多主傳送方式,可以使各個(gè)分機(jī)(節(jié)點(diǎn))根據(jù)需要自主發(fā)送數(shù)據(jù),無(wú)需主機(jī)不停地輪詢(xún),節(jié)省
2018-07-18 12:22:001454 
LIN總線(xiàn)所控制的控制單元一般都分布在距離較近的空間,傳輸數(shù)據(jù)是單線(xiàn),數(shù)據(jù)線(xiàn)最長(zhǎng)可以達(dá)到40m。在主節(jié)點(diǎn)內(nèi)配置1kΩ電阻端接12V供電,從節(jié)點(diǎn)內(nèi)配置30kΩ電阻端接12V供電。各節(jié)點(diǎn)通過(guò)電池正極端接電阻向總線(xiàn)供電,每個(gè)節(jié)點(diǎn)都可以通過(guò)內(nèi)部發(fā)送器拉低總線(xiàn)電壓。
2018-01-14 10:19:3787979 
本文首先介紹了can總線(xiàn)的概念與特點(diǎn),其次介紹了CAN總線(xiàn)原理與CAN總線(xiàn)的應(yīng)用,最后分析了can總線(xiàn)是數(shù)字信號(hào)還是模擬信號(hào)以及闡述了模擬信號(hào)和數(shù)字信號(hào)之間的區(qū)別。
2018-04-25 09:15:5776256 
CAN已經(jīng)形成國(guó)際標(biāo)準(zhǔn),并已被公認(rèn)為幾種最有前途的現(xiàn)場(chǎng)總線(xiàn)之一。CAN 總線(xiàn)的數(shù)據(jù)通信具有突出的可靠性、實(shí)時(shí)性和靈活性。由于其良好的性能及獨(dú)特的設(shè)計(jì),CAN總線(xiàn)越來(lái)越受到人們的重視,它在汽車(chē)領(lǐng)域上的應(yīng)用是最廣泛的。接下來(lái)及跟隨小編一起來(lái)了解一下CAN總線(xiàn)的工作原理、特點(diǎn)及優(yōu)缺點(diǎn)、應(yīng)用領(lǐng)域及應(yīng)用案例吧。
2018-05-07 10:36:3933700 
和其它總線(xiàn)通信接口實(shí)現(xiàn),本文以CAN總線(xiàn)為例,提出了一種基于AT89C51CC03單片機(jī)CAN-LIN網(wǎng)關(guān)設(shè)計(jì)方案。
2020-01-16 08:01:006191 
本文說(shuō)的CAN即是一種總線(xiàn),也是一種協(xié)議。因此,我們常聽(tīng)見(jiàn)CAN總線(xiàn),也常聽(tīng)見(jiàn)CAN協(xié)議。CAN協(xié)議和CANOpen協(xié)議是兩套不同的協(xié)議。從軟硬件層次來(lái)劃分,CAN協(xié)議屬于硬件協(xié)議,而CANOpen
2018-10-03 19:53:0073332 
本資料面向 LIN 總線(xiàn)初學(xué)者,對(duì)什么是 LIN,LIN 的特征,物理層、協(xié)議層及應(yīng)用層相關(guān)規(guī)定進(jìn)行說(shuō)明。本資料主要是針對(duì) LIN2.1 講解。
2019-03-21 08:00:0058 目前,CAN(控制器區(qū)域網(wǎng)絡(luò))協(xié)議已成為車(chē)載網(wǎng)絡(luò)(IVN)協(xié)議的標(biāo)準(zhǔn)。除了CAN網(wǎng)絡(luò),業(yè)界還開(kāi)發(fā)了針對(duì)低成本應(yīng)用的汽車(chē)串行協(xié)議LIN(本地互連網(wǎng)絡(luò))總線(xiàn),以支持車(chē)內(nèi)分層式網(wǎng)絡(luò)。
2019-11-01 15:34:101824 就車(chē)身控制而言,主要的應(yīng)用基于CAN/LIN總線(xiàn) 協(xié)議 。基于CAN總線(xiàn)車(chē)身控制,在汽車(chē)電子上已經(jīng)有廣泛的應(yīng)用。隨著車(chē)上總線(xiàn)節(jié)點(diǎn)的增加及高性能系統(tǒng)向中低檔汽車(chē)的發(fā)展,CAN總線(xiàn)相對(duì)較高的實(shí)現(xiàn)
2020-03-19 10:43:236006 
總線(xiàn)、接口和協(xié)議,這三個(gè)詞常常被聯(lián)系在一起,但是我們心里要明白他們的區(qū)別。
2020-09-01 13:49:0026277 
LIN(Local Interconnect Network)總線(xiàn)是本地互聯(lián)網(wǎng)絡(luò)的簡(jiǎn)稱(chēng),由LIN聯(lián)盟公司提出的一種大量應(yīng)用于汽車(chē)的串行通信協(xié)議。LIN總線(xiàn)主要應(yīng)用于性能要求不高(最高速率20Kbps),成本敏感的場(chǎng)景。
2020-10-19 10:21:0419871 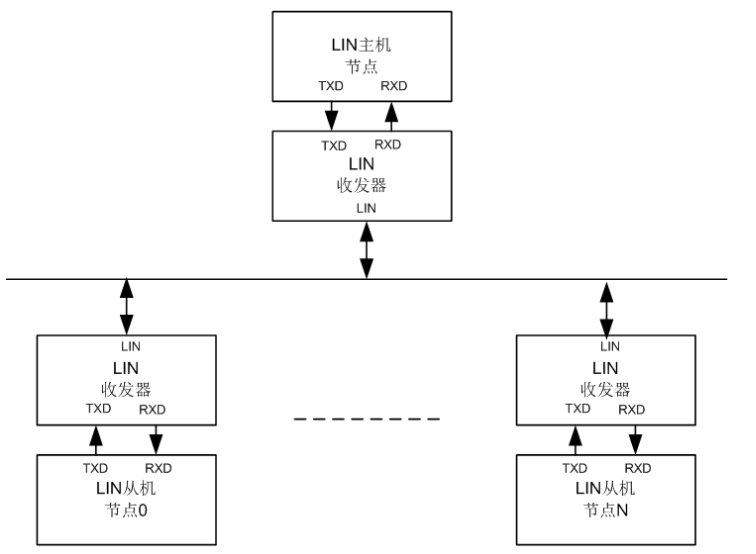
花點(diǎn)時(shí)間看了一些關(guān)于LIN總線(xiàn)基礎(chǔ)的內(nèi)容,把其中的關(guān)鍵點(diǎn)提取了出來(lái),在這里分享給大家。在這里你可能要問(wèn)不都有CAN總線(xiàn)了嗎?這個(gè)LIN總線(xiàn)又是從哪里來(lái)的?其實(shí)理由很簡(jiǎn)單,就是CAN總線(xiàn)太貴啦!處處
2020-12-06 09:37:007998 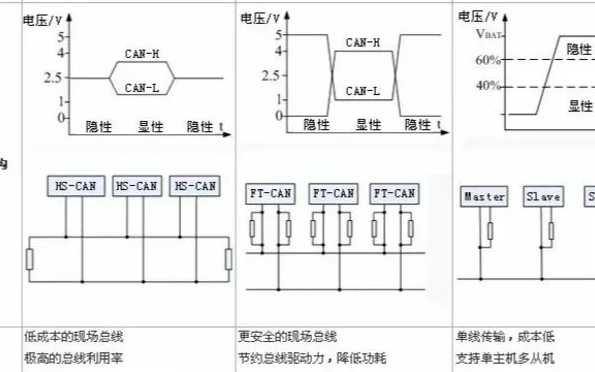
花點(diǎn)時(shí)間看了一些關(guān)于LIN總線(xiàn)基礎(chǔ)的內(nèi)容,把其中的關(guān)鍵點(diǎn)提取了出來(lái),在這里分享給大家。在這里你可能要問(wèn)“不都有CAN總線(xiàn)了嗎?這個(gè)LIN總線(xiàn)又是從哪里來(lái)的?”其實(shí)理由很簡(jiǎn)單,就是CAN總線(xiàn)太貴啦!處處都用CAN總線(xiàn)的話(huà),那整車(chē)的總線(xiàn)架構(gòu)成本將會(huì)變得很高!
2021-03-17 17:51:1825248 
現(xiàn)在,車(chē)輛的控制向高精度、高安全性發(fā)展,汽車(chē)行業(yè)正走向智能化、網(wǎng)絡(luò)化。在此過(guò)程中,汽車(chē)網(wǎng)絡(luò)起著重要的作用,CAN總線(xiàn)和LIN總線(xiàn)就是重要的汽車(chē)網(wǎng)絡(luò)總線(xiàn)。
2021-03-31 14:12:091751 
以MSCAN08和MSCAN12為示例,講述CAN現(xiàn)場(chǎng)總線(xiàn),初步掌握CAN總線(xiàn)技術(shù)的應(yīng)用。
2021-04-20 16:12:35287 CAN總線(xiàn)是什么意思 CAN的全稱(chēng)是Controller Area Network,中文名稱(chēng)是控制器局域網(wǎng)絡(luò),是由德國(guó)BOSCH公司開(kāi)發(fā)的,并且最后成為國(guó)際標(biāo)準(zhǔn),這是目前應(yīng)用最多的現(xiàn)場(chǎng)總線(xiàn)之一。現(xiàn)場(chǎng)
2021-08-07 16:37:1317486 的雙絞線(xiàn)上運(yùn)行,還能夠使用光纜連接。CAN在細(xì)節(jié)上很多地方與I2C總線(xiàn)差不多,不過(guò)也有一些區(qū)別比較明顯。 CAN總線(xiàn)用報(bào)文形式廣播的方式從一個(gè)節(jié)點(diǎn)向另一個(gè)節(jié)點(diǎn)發(fā)送數(shù)據(jù)。對(duì)于節(jié)點(diǎn)來(lái)說(shuō),不管這個(gè)數(shù)據(jù)是發(fā)到哪里的,自己都要接收。 當(dāng)一個(gè)節(jié)點(diǎn)要發(fā)送數(shù)據(jù)的時(shí)候
2021-08-07 17:07:4333792 每一幀所攜帶的數(shù)據(jù)。2、如下圖為一個(gè)LIN節(jié)點(diǎn)的層次結(jié)構(gòu)圖:LIN1.3與LIN2.1的區(qū)別在于,LIN1.3沒(méi)有TL層,Signal interaction放在Protocol層中,沒(méi)有單獨(dú)的TP層。3、LIN總線(xiàn)特點(diǎn):串行通信:線(xiàn)間干擾小,節(jié)省線(xiàn)束,傳輸距離長(zhǎng);..
2021-11-26 16:06:05152 很多的司機(jī)朋友以及工控圈的朋友都有聽(tīng)到過(guò)“CAN總線(xiàn)”一詞,今天我們就來(lái)一起看一下CAN總線(xiàn)為什么這么火? CAN總線(xiàn),也叫做控制器局域網(wǎng)總線(xiàn)(Controller Area Network
2022-01-15 17:04:485782 當(dāng)汽車(chē)工業(yè)進(jìn)入發(fā)展階段時(shí),CAN 總線(xiàn)已經(jīng)開(kāi)始以其能夠提供的廣泛功能應(yīng)用于該行業(yè)。它在具有以非常合理的成本同時(shí)擁有相當(dāng)多的優(yōu)秀特性,很快就成為了目前使用的核心通信協(xié)議。但是,隨著時(shí)間的推移,技術(shù)發(fā)展
2022-06-20 17:40:144968 
高速CAN總線(xiàn)上為顯性電平(邏輯0)時(shí),CAN_H為3.5V、CAN_L為1.5V,此時(shí)電壓差是2V,顯性狀態(tài)的CAN總線(xiàn)電壓范圍。
高速CAN總線(xiàn)上為隱性電平(邏輯1)時(shí),CAN_H和CAN_L都為2.5V,此時(shí)電壓差就是0V,隱性狀態(tài)的CAN總線(xiàn)電壓范圍。
2022-09-13 16:57:223631 plccan總線(xiàn)通訊的意義就在于提高了PLC工作的穩(wěn)定性和安全性,畢竟CAN總線(xiàn)可以算得上是最穩(wěn)的幾類(lèi)現(xiàn)場(chǎng)總線(xiàn)之一了。
2022-09-21 14:07:233734 LIN是CAN總線(xiàn)系統(tǒng)的子網(wǎng),也叫“局域子系統(tǒng)”。汽車(chē)上LIN總線(xiàn)控制的所有系統(tǒng)之間的數(shù)據(jù)交換,必須通過(guò)CAN總線(xiàn)控制單元才能實(shí)現(xiàn)。
2022-10-13 16:40:394654 電子發(fā)燒友網(wǎng)報(bào)道(文/李寧遠(yuǎn))汽車(chē)智能化、電動(dòng)化的發(fā)展趨勢(shì)下,現(xiàn)在的車(chē)輛包含了許多總線(xiàn)網(wǎng)絡(luò)。LIN總線(xiàn)是汽車(chē)分布式電子系統(tǒng)中一種低成本的串行通訊網(wǎng)絡(luò),作為CAN、CAN FD等其他網(wǎng)絡(luò)的補(bǔ)充出現(xiàn)
2022-11-01 07:20:081029 在這里你可能要問(wèn)“不都有CAN總線(xiàn)了嗎?這個(gè)LIN總線(xiàn)又是從哪里來(lái)的?”其實(shí)理由很簡(jiǎn)單,就是CAN總線(xiàn)太貴啦!處處都用CAN總線(xiàn)的話(huà),那整車(chē)的總線(xiàn)架構(gòu)成本將會(huì)變得很高!在一些比如車(chē)身電子配件的地方
2023-02-13 13:50:003329 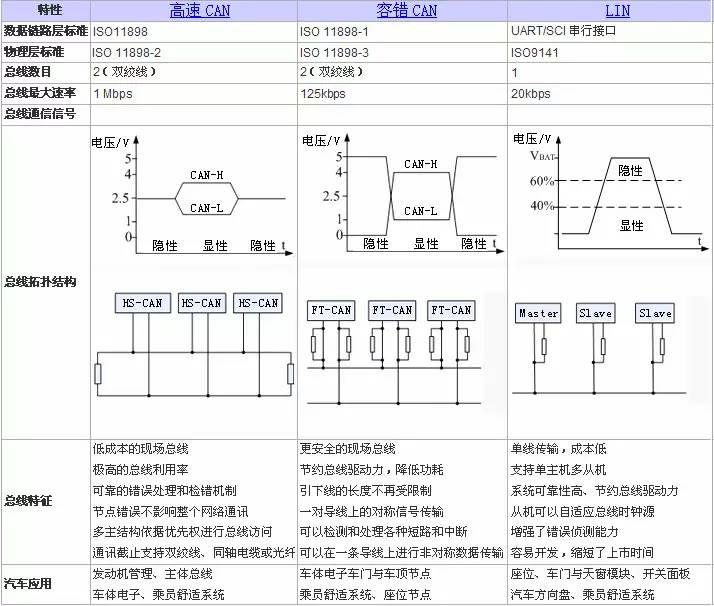
LIN 總線(xiàn) ESD 保護(hù)二極管-PESD1LIN
2023-02-27 18:29:231 汽車(chē)網(wǎng)絡(luò)通信中除了CAN的通信方式外,還有另外一種低成本通信方式——LIN系統(tǒng)。它的英文是“LocalInterconnectNetwork”,LIN總線(xiàn)基于UART/SCI(通用異步收發(fā)器/串行
2021-12-03 15:54:492102 
LIN網(wǎng)絡(luò)作為串行通訊網(wǎng)絡(luò),用于實(shí)現(xiàn)汽車(chē)中的分布式電子系統(tǒng)控制,它是現(xiàn)有汽車(chē)CAN網(wǎng)絡(luò)功能的補(bǔ)充。LIN總線(xiàn)有效降低了汽車(chē)制造成本,提升了系統(tǒng)結(jié)構(gòu)的靈活性,并且無(wú)論從硬件還是軟件的角度而言,都為網(wǎng)絡(luò)
2022-09-22 10:24:48543 
大家好,本文章向大家介紹LIN總線(xiàn)的物理層。
2023-07-12 10:11:096289 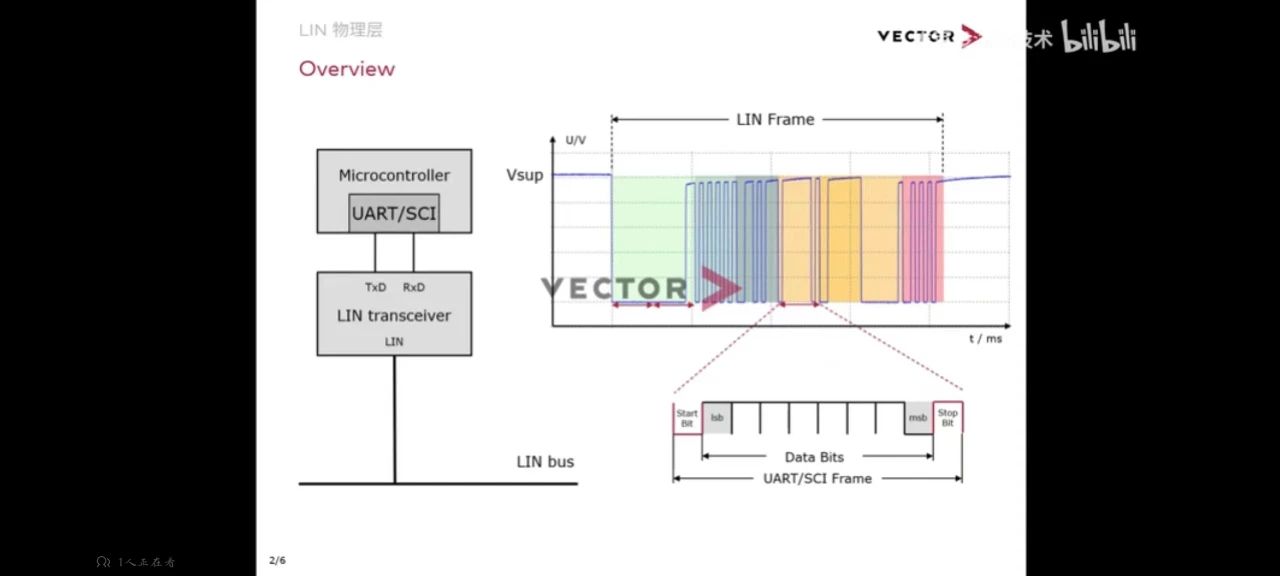
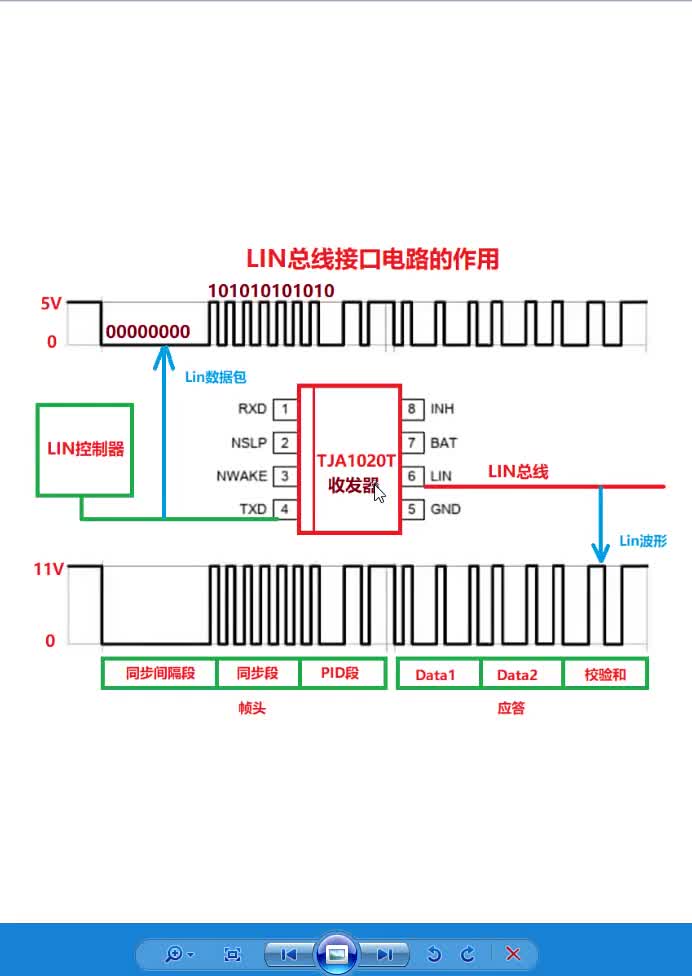
大家好,本文章向大家介紹LIN總線(xiàn)的物理層。 LIN相對(duì)于CAN是一種低成本的通信總線(xiàn)。 出于成本原因與CAN相比,LIN通信線(xiàn)路為一根線(xiàn)。 另外,LIN通信可以不需要通信控制器,它的物理通信可以
2023-07-13 15:46:151638 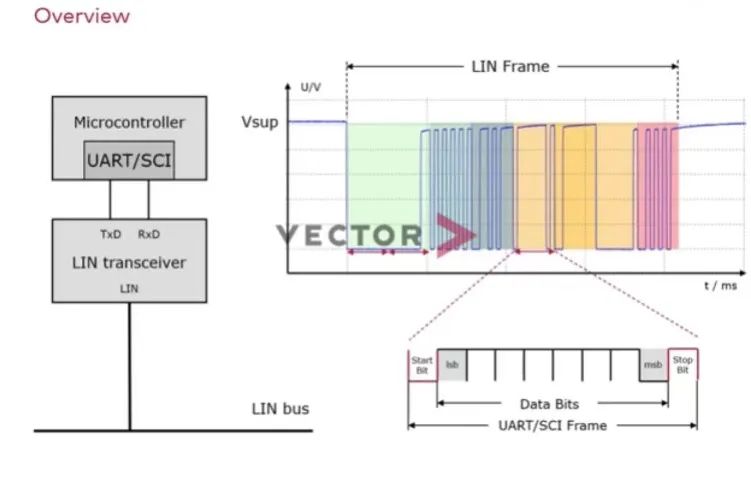
CAN總線(xiàn))提供輔助功能,因此LIN總線(xiàn)是一種輔助的總線(xiàn)網(wǎng)絡(luò)。在不需要CAN 總線(xiàn)的帶寬和多功能的場(chǎng)合,比如智能傳感器和制動(dòng)裝置之間的通訊使用LIN 總線(xiàn)可大大節(jié)省成本。 LIN聯(lián)盟成立于1999年,最初由奧迪、 寶馬、克萊斯勒、摩托羅拉、博世、大眾和沃爾沃等整車(chē)廠及芯片制造商創(chuàng)立,目的
2023-07-18 11:08:392462 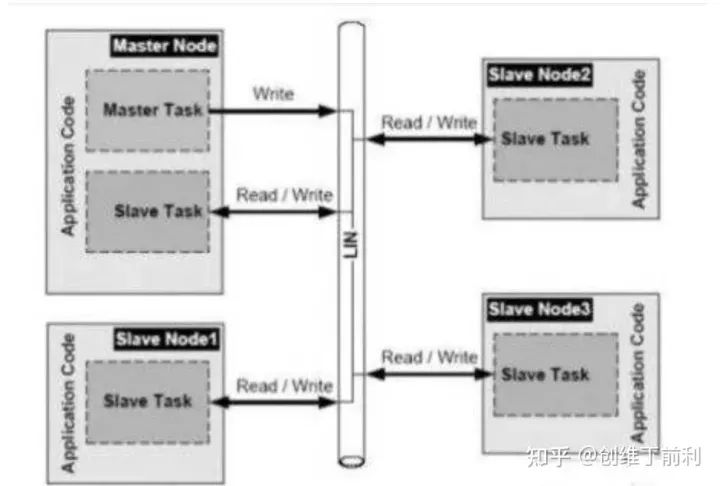
LIN(Local Interconnect Network)即局部連接網(wǎng)絡(luò),也被稱(chēng)為“局域網(wǎng)子系統(tǒng)”即LIN總線(xiàn)是CAN總線(xiàn)網(wǎng)絡(luò)下的子系統(tǒng),車(chē)上各個(gè)LIN總線(xiàn)系統(tǒng)之間的數(shù)據(jù)交換是由控制單元通過(guò)CAN數(shù)據(jù)總線(xiàn)實(shí)現(xiàn)的
2023-07-26 10:12:197554 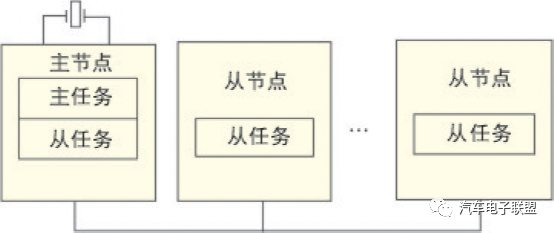
認(rèn)識(shí)CAN 總線(xiàn)錯(cuò)誤的第一步就是了解認(rèn)識(shí)CAN 總線(xiàn)協(xié)議和它的具體功能,這樣才能更容易地理解CAN 總線(xiàn)是如何去發(fā)現(xiàn)并解決錯(cuò)誤的。
2023-08-14 15:18:463228 
從事汽車(chē)MCU開(kāi)發(fā)的小伙伴,對(duì)CAN/CAN FD、Ethernet、Lin這幾種總線(xiàn),應(yīng)該比較熟悉,即使沒(méi)具體開(kāi)發(fā)過(guò),也應(yīng)該聽(tīng)過(guò)。如果想更深刻的理解這些總線(xiàn),實(shí)踐是最行之有效的方法。在之前
2023-08-30 16:17:302498 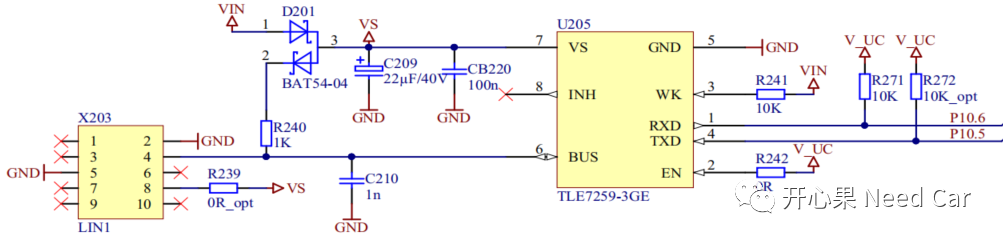
LIN(Local Interconnect Network)總線(xiàn)是基于UART/SCI(通用異步收發(fā)器/串行接口)的低成本串行通訊協(xié)議。其目標(biāo)定位于車(chē)身網(wǎng)絡(luò)模塊節(jié)點(diǎn)間的低端通信,主要用于智能傳感器和執(zhí)行器的串行通信,而這正是CAN總線(xiàn)的帶寬和功能所不要求的部分。
2023-09-13 16:35:414328 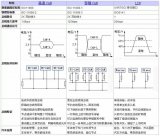
can總線(xiàn)為什么要用雙絞線(xiàn)?can總線(xiàn)不用雙絞線(xiàn)可以嗎? CAN總線(xiàn)是一種數(shù)據(jù)通信協(xié)議,廣泛用于汽車(chē)、航空、船舶、工業(yè)自動(dòng)化、機(jī)器人等領(lǐng)域。CAN總線(xiàn)采用串行通信方式,主要用于實(shí)現(xiàn)多個(gè)模塊之間的通信
2023-09-14 16:48:053603 虹科的LIN/CAN總線(xiàn)汽車(chē)零部件測(cè)試方案是一款優(yōu)秀的集成套裝,基于Baby-LIN系列產(chǎn)品,幫助客戶(hù)高效完成在測(cè)試、生產(chǎn)階段車(chē)輛零部件質(zhì)量、功能、控制等方面的檢測(cè)工作。
2023-09-20 10:24:07472 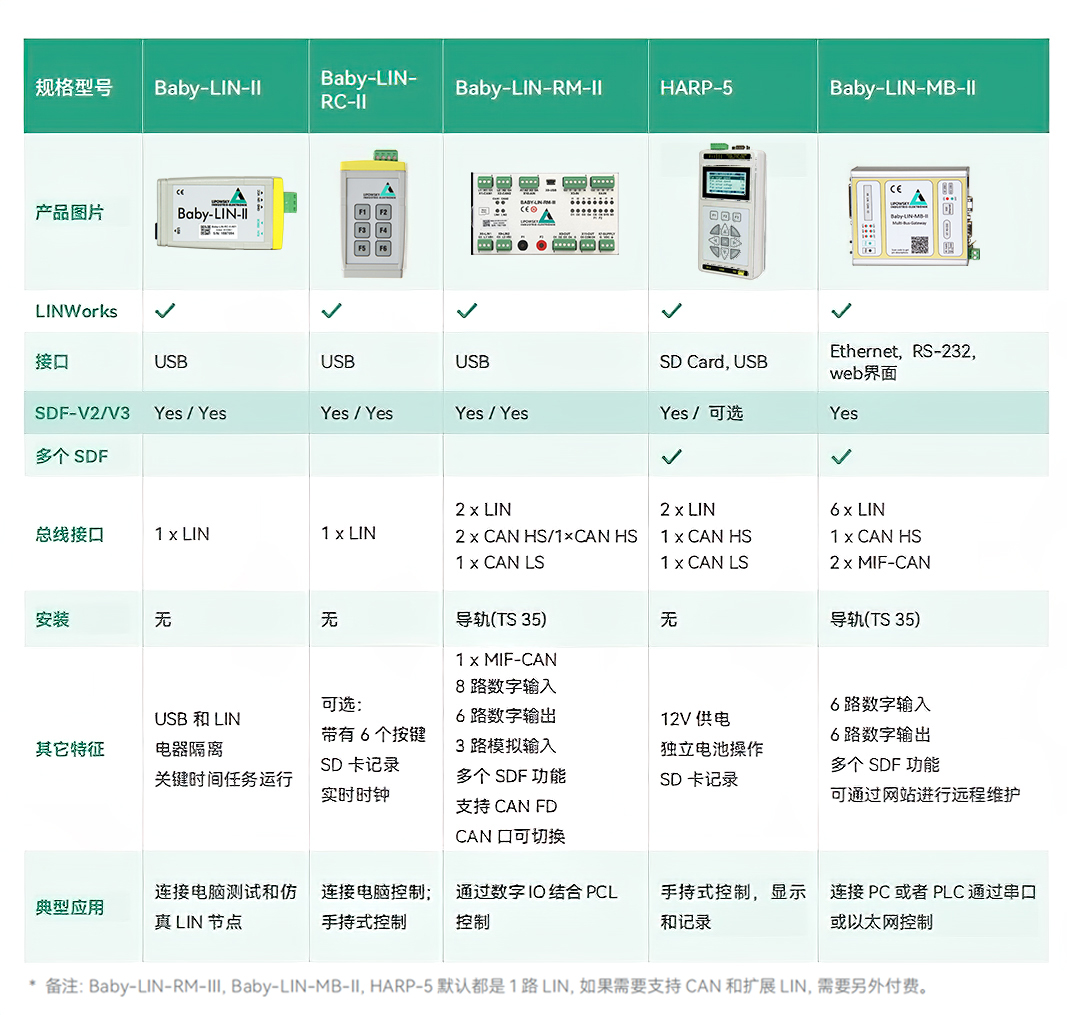
的,后四個(gè)總線(xiàn)系統(tǒng)來(lái)自燃油汽車(chē)。LIN總線(xiàn)英文全稱(chēng)為L(zhǎng)ocal Interconnect Network,即局域互聯(lián)網(wǎng)絡(luò),是一種低成本的通信網(wǎng)絡(luò),是對(duì)CAN網(wǎng)絡(luò)的一種補(bǔ)充,主控制單元可以通過(guò)LIN總線(xiàn)連接從控制單元。
2023-11-13 10:05:213661 
在測(cè)量LIN總線(xiàn)時(shí)要注意,當(dāng)LIN總線(xiàn)在不傳輸數(shù)據(jù)時(shí),電壓為12V;LIN是主從協(xié)議總線(xiàn),從控制單元的所有動(dòng)作都要接受主模塊的控制。在測(cè)量過(guò)程中,可以操作相關(guān)部件,如駕駛員側(cè)車(chē)門(mén)控制面板,使主控制單元通過(guò)LIN總線(xiàn)發(fā)出指令。
2023-11-20 16:45:42737 
高速CAN總線(xiàn)和低速CAN總線(xiàn)的特性 高速CAN總線(xiàn)和低速CAN總線(xiàn)是兩種常見(jiàn)的CAN總線(xiàn)類(lèi)型。它們?cè)跀?shù)據(jù)傳輸速率、最大電纜長(zhǎng)度、適用場(chǎng)景等方面存在一些差異。下面將詳盡、詳實(shí)、細(xì)致地介紹這兩種CAN
2024-01-31 14:09:01497 can總線(xiàn)與485總線(xiàn)五大區(qū)別? CAN總線(xiàn)和485總線(xiàn)是現(xiàn)代工業(yè)自動(dòng)化領(lǐng)域中常見(jiàn)的兩種通信總線(xiàn),它們都具有一定的優(yōu)勢(shì)和特點(diǎn)。 一、傳輸距離 CAN總線(xiàn)和485總線(xiàn)在傳輸距離上有著明顯的差異。CAN
2024-02-03 09:22:391583
 電子發(fā)燒友App
電子發(fā)燒友App















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論