電機位置編碼器廣泛用于伺服驅動器、機器人、機床、印刷機、紡織機和電梯等工業電機控制應用。用接口把這些編碼器連接到您系統的其它部分會帶來一些棘手的電磁兼容(EMC)問題。為幫您應對這些挑戰,筆者將以
2018-05-16 08:43:56 8250
8250 這些是使用基于RS-485或RS-422的串行數字接口,與一個絕對位置編碼器相連接的主要標準。更進一步的接口標準包括Profibus分散式外設 (DP) 和Profibus輸入/輸出
2018-05-25 09:45:5012098 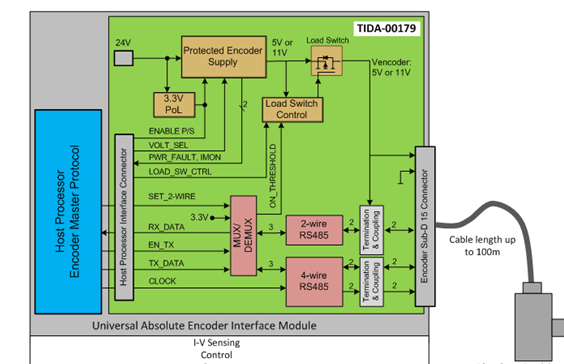
在本系列中,到目前為止,我們已經討論了針對電機位置編碼器的不同數字接口選擇,其中包括EnDat 2.2雙向/串行/同步 (BiSS) 和HIPERFACE DSL。 這些是使用基于RS-485
2018-05-28 09:20:2211127 01.串行編碼器接口SEI的應用場景SEI串行編碼器接口是HPM單片機獨創的通信接口外設,可以在同一個硬件接口上實現不同類型的串行通信協議的數據收發。是5300精確位置系統的一部分,可以與系統中的其它外設協同工作。主要應用場景:作為主機,從外
2023-12-20 08:17:33786 
您好,我用F28035做步進電機的位置控制,傳感器使用增量式5線編碼器,有以下幾個問題:1. 傳感器5V供電,方波信號的高電平在4.2V以上,編碼器和28035芯片之間需要調理電路么?直接連到芯片
2020-05-20 15:02:44
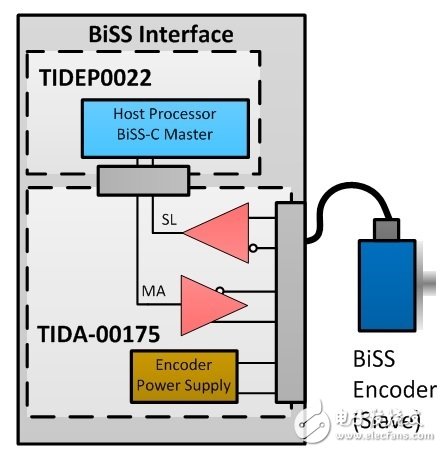
`描述該 TI 設計基于 BiSS 標準實現適用于位置或旋轉編碼器的硬件接口解決方案。它既支持 BiSS 點對點配置又支持 BiSS 總線配置。構件塊包括 5V 的 BiSS 編碼器電源(采用創新
2015-04-29 11:27:30
描述該 TI 設計基于 BiSS 標準實現適用于位置或旋轉編碼器的硬件接口解決方案。它既支持 BiSS 點對點配置又支持 BiSS 總線配置。構件塊包括 5V 的 BiSS 編碼器電源(采用創新
2018-12-04 14:24:19
本帖最后由 eehome 于 2013-1-5 09:52 編輯
串行通訊接口詳解,
2012-08-08 11:20:26
編碼器接口模式是什么?編碼器配置源碼的配置過程是怎樣的?
2021-11-23 06:03:51
前位置偏離原點的位置數據信息,是稱絕對式,英文叫做Absoulute。比如,一款10 位BCD 碼輸出的編碼器分辨率為360C/T,那么每個單位對應1°,如果軸偏離原點一個單位,也就是處在1°的位置
2012-02-24 22:03:25
脈沖數計量。介質檢測,在直齒條、轉動鏈條的鏈輪、同步帶輪等來傳遞直線位移信息。3、速度測量線速度,通過跟儀表連接,測量生產線的線速度角速度,通過編碼器測量電機、轉軸等的速度測量4、位置測量機床方面,記憶
2019-10-13 08:00:00
編碼器的原理是什么?編碼器可分為哪幾類?編碼器是如何進行接線的?編碼器軟件四倍頻技術是什么?
2021-08-04 06:08:39
編碼器是什么?編碼器工作原理是什么?
2021-10-19 09:59:08
分為接觸式和非接觸式兩種;按照工作原理編碼器可分為增量式和絕對式兩類。增量式編碼器是將位移轉換成周期性的電信號,再把這個電信號轉變成計數脈沖,用脈沖的個數表示位移的大小。絕對式編碼器的每一個位置對應一個
2017-11-24 19:00:47
為什么在使用同步機做自整定的時候,整定的角度有時候偏差會比較大,會出現飛車現象。而更改編碼器后可以正常整定。請問編碼器什么情況下會導致這樣的問題。另外,斷電測試時候,編碼器會損壞的原因有哪些?(電源穩定)
2018-09-07 14:40:40
管理器 BoosterPack&trade(...)主要特色靈活的低電壓設計支持多種絕對編碼器接口以及旋轉變壓器和 SINCOS 傳感器TIDA-1010 與支持 C2000 位置管理器的 MCU
2018-10-22 10:02:30
`描述此 TI 設計基于 HEIDENHAIN EnDat 2.2 標準實現適用于位置和旋轉編碼器的硬件接口解決方案。構件塊包括編碼器電源(采用創新的智能 e-Fuse 技術)和可靠的半雙工
2015-04-29 11:55:26
業界首款基于BiSS的產品,其采用24位多圈計數的絕對位置數據可在幾個微秒內完成。該產品適用于光學旋轉編碼器、機械旋轉編碼器、線性位移測量、DC電機內置傳感器及汽車應用。 IC-NQ采用單5V電源
2018-12-03 10:23:05
我想問一下,TI的PMSM的例程庫里,增量編碼器永磁同步電機,初始位置是通過什么方式實現的。在例程的那個位置,謝謝
2018-10-30 15:58:42
就在于根據編碼器和電機供應商選擇和集成正確的數字編碼器協議標準。三個最常用的位置編碼器協議標準為EnDat 2.2, BiSS C和高性能接口數字舵機鏈接(HIPERFACE)DSL。讓我們來看下這三個位置
2019-08-05 04:45:13
旋轉編碼器的原理是什么?如何去編寫STM32配置Arduino的程序?STM32 Arduino是如何讀取編碼器和旋轉位置方向的?
2021-11-15 08:01:24
為什么要用編碼器?STM32編碼器的原理是什么?
2021-11-24 07:32:10
C值光電編碼器SSI或BiSSC接口轉子位置反饋信息額外的正余弦信號,每圈2048個正余弦波可以選擇高達21位的分辨率用于全數字量轉速采集堅固的ShaftLock軸鎖軸承設計baumer增量式編碼器HOG10DN1024I LR現貨促銷
2018-07-22 17:51:03
labview現在可以采集編碼器的位置信息,但是由于是增量的編碼器,每次程序暫停后再運行,編碼器的位置信息會自動清零,而不是在上一次數據的基礎上增大或者減小請教該如何解決。
2019-10-23 09:54:56
編碼器能夠滿足高精度、高可靠性、低成本的設計要求。那么將AS5040磁旋轉編碼器應用于永磁同步電機位置檢測時,需要解決兩個問題:一是磁旋轉編碼器安裝位置初始定位,即確定編碼器輸出的位置信號與電機實際
2021-09-22 09:41:15
在本系列中,到目前為止,我們已經討論了針對電機位置編碼器的不同數字接口選擇,其中包括EnDat 2.2雙向/串行/同步 (BiSS) 和HIPERFACE DSL。這些是使用基于RS-485或
2018-09-04 14:48:19
脈沖編碼器簡介脈沖編碼器是利用光學、磁性或機械接點的方式感測位置,并將位置信息轉換為電子信號后輸出的傳感器。其輸出的電子信號一般被用作控制位置時的回授信號。脈沖編碼器按照工作原理可分為增量式和絕對式
2021-03-29 06:12:47
編碼器可以分為哪幾類?怎樣去讀取編碼器的位置值?伺服電機與編碼器是怎樣工作的?
2021-09-26 08:43:27
編碼器的原理是什么?電機編碼器是如何進行接線的?編碼器接口的配置方式有哪些?使用編碼器時有哪些注意事項?
2021-08-02 10:21:23
可以直接通過編碼器讀取原點的位置嗎
2023-10-13 06:33:06
(PRU-ICSS) 外設)上實施。 在本系列的下一篇文章中,筆者和自己的同事將更深入地探討每種編碼器接口,并提供關于如何實現BiSS-C位置編碼器符合EMC標準的工業接口/BiSS-C主站接口
2018-09-05 16:07:42
有沒有大佬弄過 基于FPGA的BISS-C協議編碼器解碼,想問一下該怎么搞,有償,或者有沒有現成的產品可以幫忙解碼?
2023-05-23 17:17:13
如何使用編碼器接口實現定位?
2022-02-11 07:32:50
。AS5040磁旋轉編碼器能夠滿足高精度、高可靠性、低成本的設計要求。 那么將AS5040磁旋轉編碼器應用于永磁同步電機位置檢測時,需要解決兩個問題:一是磁旋轉編碼器安裝位置初始定位,即確定編碼器輸出的位置
2023-03-09 15:30:26
電機的旋轉編碼器輸出是5V的脈沖信號,DSP是3.3V供電的,這個接口怎么設計?
2013-04-08 14:11:56
旋轉編碼器是一種經過驗證的流行解決方案,用于測量旋轉軸的速度,運動方向或位置。有幾種不同的類型,主要的兩種是絕對編碼器和增量編碼器。是如何工作的?有什么不同?如何為應用選擇合適的類型?
2021-01-01 07:46:31
PIC18F4331里的正交編碼器接口怎么用啊!我要用這個模塊讀取編碼器的數據,編碼器一轉程序就不走了!找不到資料,誰有給分享下啊,謝謝了
2013-06-04 20:25:59
帶編碼器的步進電機,電機在工作的情況下有時會出現電機自身的步數和編碼器測得的步數不一致的情況!以編碼器測得的步數和電機自身的步數對比,調整電機步數,有時會出現調整后的電機位置與預設位置不符現象,(步進電機步數準確,編碼器不準確?)問下有什么辦法解決沒?
2018-05-09 22:37:31
永磁同步伺服電機無編碼器運轉怎么實現的
2023-12-25 07:29:35
編碼器接口的計數規則有哪些?使用編碼器接口要注意哪些事項呢?
2021-12-15 06:18:26
描述該高 EMC 抗擾度參考設計展示了用于驅動器和編碼器(如 EnDat 2.2、BiSS?、Tamagawa? 等)的 RS-485 收發器。EMC 抗擾度(尤其是逆變器開關噪聲抗擾度)對于工業
2018-09-30 09:34:58
在本博客系列的第一部分,Martin Staebler提供了各類電機位置編碼器及其接口的概述。在第二部分中,筆者將對雙向/串行/同步(BiSS)位置編碼器的接口進行講解。 BiSS是來自
2018-09-05 16:07:37
描述TIDA-00179 參考設計是一種符合 EMC 標準的通用數字接口,用于連接到絕對位置編碼器,例如 EnDat 2.2、BiSS?、SSI 或 HIPERFACE DSL?。該設計支持
2018-11-09 14:37:40
是,使用絕對編碼器有助于減少系統受到的電氣噪聲干擾。與采用脈沖計數的增量編碼器不同,絕對編碼器允許系統從二進制輸出,或以數字方式從串行總線讀取經過錯誤校驗的代碼,以便計算位置。此外,在同一個系統中組合多個絕對
2018-12-20 16:31:09
現在要用stm32F407VE采集增量式編碼器的信號,計算無刷電機的速度,stm32定時器的編碼器接口怎么使用
2017-10-28 18:10:06
我們期望用tms320f28377d實現四臺電機的同時控制,需要接入4個ENDAT或者BISS類型的編碼器。如下疑問期望您能指點:1、是否需要4個硬件SPI接口才行?而tms320f28377d只有
2018-09-13 09:51:11
請問有人做過基于正交編碼器和PSIM的永磁同步電機的控制系統的設計與仿真嗎?
2020-01-08 19:43:26
描述TIDA-00176 參考設計是針對正弦/余弦位置編碼器且符合 EMC 標準的工業接口。其應用包括需精確速度和位置控制的工業驅動。 該設計采用 16 位雙路取樣 ADC 且可使用插入式兼容 14
2018-11-09 17:04:12
該參考設計基于 BiSS 標準為位置或旋轉編碼器實現了硬件接口。它支持 BiSS 點對點和 BiSS 總線配置。其構建塊包括采用創新智能電子保險絲技術的 5V BiSS 編碼器電源,以及穩健的全雙工
2007-05-28 11:50:09 36
36 TIDA-00179 是符合 EMC 標準的通用數字接口,可連接 EnDat 2.2、BiSS®、SSI 或 HIPERFACE DSL® 等絕對位置編碼器。此參考設計支持 15V
2009-08-15 11:17:510 基于復合式光電編碼器的永磁同步電機啟動方法研究:本文簡述了復合式光電編碼器的工作原理,分析現有永磁同步電機轉子位置檢測方法的不足,提出了使用復合式光電編碼器對永
2009-10-30 08:43:2360 博思特(POSITAL)KIT編碼器是一款先進的設備,具有較高的精確度和穩定性。它采用了先進的電子元件和工藝,可以在惡劣環境下正常運轉。能夠精準地測量位置和速度信息。下面我們就詳解這一款編碼器的特點
2024-02-26 16:10:35
編碼器,編碼器是什么意思
編碼器
編碼器(encoder)是將信號
2010-03-08 15:04:262868 針對位置檢測的需要,提出了一種光電編碼器 位置檢測 系統。首先闡述了 光電編碼器 的工作原理,并對基于MSP430單片機位置檢測系統的硬件和軟件系統進行了詳細的論述。結論證明,
2011-08-02 17:02:0981 旋轉編碼器抗抖動接口電路設計
2013-09-26 14:48:5488 EnDat 2.2-位置編碼器雙向數字接口。
2016-03-14 15:50:0019 接口 - 海德漢編碼器,全部產品接口介紹,各種接口技術。
2016-03-14 15:44:119 在本系列中,到目前為止,我們已經討論了針對電機位置編碼器的不同數字接口選擇,其中包括EnDat 2.2雙向/串行/同步 (BiSS) 和HIPERFACE DSL。這些是使用基于RS-485
2017-04-26 12:08:111553 電機位置編碼器廣泛用于伺服驅動器、機器人、機床、印刷機、紡織機和電梯等工業電機控制應用。用接口把這些編碼器連接到您系統的其它部分會帶來一些棘手的電磁兼容(EMC)問題。為幫您應對這些挑戰,筆者將以
2017-04-26 13:16:121274 在本博客系列的第一部分,Martin Staebler提供了各類電機位置編碼器及其接口的概述。在第二部分中,筆者將對雙向/串行/同步(BiSS)位置編碼器的接口進行講解。BiSS是來自iC-Haus公司的開源協議。它定義了適用于致動器和傳感器(如旋轉編碼器或位置編碼器)的數字雙向串行接口。
2017-04-26 13:24:381178 泰德- 00179參考設計是一種符合EMC標準的通用數字接口,用于連接到絕對位置編碼器,例如EnDat 2.2,bis,SSI或HIPERFACE DSL。該設計支持15-60V(標稱24
2017-05-04 16:35:2914 該TI設計基于雙標準實現適用于位置或旋轉編碼器的硬件接口解決方案。它既支持bis點對點配置又支持bis總線配置。構件塊包括5 v的bis編碼器電源(采用創新的智能e-Fuse技術)和可靠的全雙工
2017-05-08 17:13:0311 泰德- 00202參考設計實現了一種連接至HIPERFACE位置編碼器的符合EMC標準的工業模擬和數字混合接口。此設計對雙向參數通道使用具有IEC-ESD和IEC-EFT保護的3.3 v電源
2017-05-09 08:55:5424 接觸式和非接觸式兩種;按照工作原理編碼器可分為增量式和絕對式兩類。增量式編碼器是將位移轉換成周期性的電信號,再把這個電信號轉變成計數脈沖,用脈沖的個數表示位移的大小。絕對式編碼器的每一個位置對應一個確定的數字碼,因
2017-05-24 11:41:0722 電機位置編碼器廣泛用于伺服驅動器、機器人、機床、印刷機、紡織機和電梯等工業電機控制應用。用接口把這些編碼器連接到您系統的其它部分會帶來一些棘手的電磁兼容(EMC)問題。為幫您應對這些挑戰,筆者將以
2017-11-17 01:53:522544 在本系列中,到目前為止,我們已經討論了針對電機位置編碼器的不同數字接口選擇,其中包括EnDat 2.2雙向/串行/同步 (BiSS) 和HIPERFACE DSL。 這些是使用基于RS-485
2017-11-17 01:56:011068 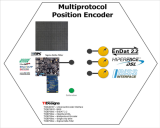
本手冊介紹了針對NA400HCM401-0302 SSI(同步串行接口)模塊的硬件和軟件實現。模塊NA400HCM401-0302是一種用于絕對編碼器的同步串行接口,它由用戶應用程序通過打開的SSI接口控制。SSI通道的位置值由模塊在每個固定周期自動讀取(除非禁用了通道)。
2017-11-25 11:10:330 正交編碼器接口(Quadrature Encoder Interface,QEI)模塊提供了與用于獲得機械位置數據的增 量式編碼器的接口。正交編碼器(也稱為增量式編碼器或光電式編碼器)用于檢測旋轉
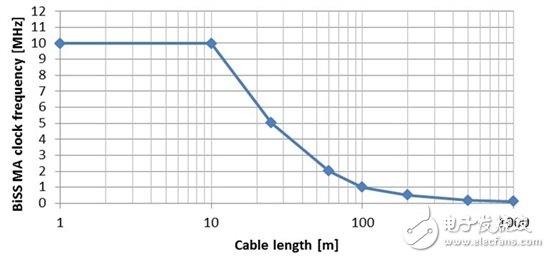
2018-06-22 04:20:0014 位置編碼器是工業自動控制中重要的反饋環節執行元件。位置編碼器按工作方式分為絕對式和增量式兩種。絕對位置式編碼器的數據輸出一般采用串行通信的方式。位置編碼器的通信速度,在一定程度上影響閉環系統的時間常數。
2019-04-26 08:40:003593 
,被廣泛應用于雷達、轉臺、機器人、數控機床和高精度伺服系統等諸多領域。絕對式編碼器的數據輸出以同步串行輸出為主,EnDat接口是海德漢專為編碼器設計的數字式、全雙工同步串行接口。它不僅能為增量式和絕對
2018-12-15 09:54:238041 
EnDat接口是HEIDENHAIN專為編碼器設計的數字式、全雙工同步串行的數據傳輸協議,具有傳輸速度快、功能強大、連線簡單、抗干擾能力強等優點,是編碼器、光柵尺數據傳輸的通用接口。本文闡述
2019-01-01 13:13:001895 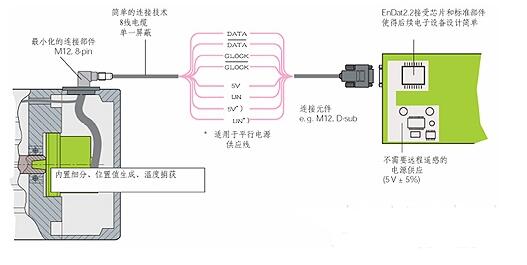
除此之外,有些正交編碼器還包含被稱為零信號或者參考信號的第三個輸出通道。這個通道每旋轉一圈輸出一個單脈沖。你可以使用這個單脈沖來精確計算某個參考位置。在絕大多數編碼器中,這個信號稱為Z軸或者索引。
2019-12-19 09:09:5811849 
的另一個應用,即幫助把您選擇的數字位置編碼器主接口集成入Sitara處理器內。
? 首先,讓我們來看下包含位置編碼器的系統層面方塊圖——見圖1。諸如伺服驅動器等應用通常都配有集成了數字位置反饋編碼器的電機
2021-11-10 09:38:57494 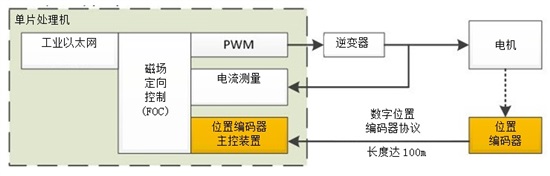
本文介紹工業自動化領域的設計人員在設計用于電機控制的位置檢測接口時面臨的常見問題,即:能在速度更快、尺寸更小的應用中檢測位置。利用從編碼器捕獲的信息以便精確測量電機位置對于自動化和機器設備的成功運行很重要。快速、高分辨率、雙通道同步采樣模數轉換器(ADC)是此系統的重要組件。
2022-04-01 13:43:511440 本文介紹工業自動化領域的設計人員在設計用于電機控制的位置檢測接口時面臨的常見問題,即:能在速度更快、尺寸更小的應用中檢測位置。利用從編碼器捕獲的信息以便精確測量電機位置對于自動化和機器設備的成功運行很重要。快速、高分辨率、雙通道同步采樣模數轉換器(ADC)是此系統的重要組件。
2022-04-09 11:25:271899 根據應用情況,控制器或變速電機驅動器可能需要測量轉子速度、位置和方向的任意組合。旋轉編碼器是針對這類應用很合適的設備,它可以是相對于參考點給出位置的增量類型,也可以是表示每個轉子位置的唯一編碼的絕對
2022-06-30 11:19:061195 同步編碼器軸的定義為:通過外部連接的同步編碼器的輸入脈沖驅動輸入軸的情況下使用同步編碼器軸。
2023-03-30 14:40:221208 什么是絕對值編碼器?絕對值編碼器裝置在多圈旋轉后仍然能提供絕對位置,不用時歸零。多回轉裝置包括內部傳動裝置,這是給用戶提供最好的解決方案。主接口是BiSS-C或SSI。對于某些設備,具體位置載入的延遲可能是一個難題。
2023-03-24 11:26:182774 
增量型編碼器與絕對值型編碼器怎么選擇?在進行編碼器選擇時,增量型編碼器和絕對值型編碼器是兩種常見的選擇。增量型編碼器是一種基于脈沖計數的編碼器,通常由光電編碼器和霍爾編碼器組成。這種編碼器的主要優點
2023-05-08 11:28:331341 
編碼器種類及型號:最常見的編碼器類型是旋轉編碼器和線性編碼器。旋轉編碼器通常用于測量機器人的關節位置,以及測量車輛和船只的轉向角度。線性編碼器通常用于測量運動平臺的位置和速度。旋轉編碼器和線性編碼器可以分為絕對式和增量式編碼器。絕對式編碼器可以直接讀取位置信息,而增量式編碼器則需要計算位置信息。
2023-05-18 11:15:003459 
編碼器是什么?編碼器有哪些分類及應用;編碼器是什么?在數字信號處理和通信系統中,編碼器是一種重要的設備,用于將原始數據轉換為字符序列或二進制碼序列。編碼器是一種可以同時測量物體位置和方向的蒿精度
2023-05-18 11:08:473137 
增量式編碼器和絕對值編碼器有哪些區別?增量式編碼器通過對變化量進行計數來測量位置變化,而絕對值編碼器可提供實際位置值。因此,增量式編碼器對于測量無限循環的運動比較有用,因為它們可以使用計數器來跟蹤旋轉次數和速度。相比之下,絕對值編碼器適用于任務需要直接獲得位置信息的情景,如機器人運動。
2023-07-05 13:34:282249 
光學式絕對型編碼器中也有一個會和主軸同步旋轉的圓編碼盤,盤中有分為許多同心圓狀的透明及不透明的區域,盤的兩側分別有光源及光傳感器數組,光源穿過編碼盤后,被光傳感器采集,采集的信息直接代表了轉軸的位置;
2023-07-09 16:07:102444 
增量型編碼器和絕對值編碼器是兩種常見的位置控制裝置,它們在控制位置方面有著不同的工作原理和特點。雖然它們都可以用于位置控制,但是在某些方面存在差異。首先,增量型編碼器是通過檢測位置變化的增量來確定
2023-08-18 14:43:50477 
伺服編碼器這個基本的功能與普通編碼器是一樣的,比如增量型的有A,A反,B,B反,Z,Z反等信號,除此之外,伺服編碼器還有著跟普通編碼器不同的地方,那就是伺服電機多數為同步電機,同步電機啟動的時候需要
2023-08-23 10:58:11888 伺服電機編碼器原理伺服編碼器這個基本的功能與普通編碼器是一樣的,比如增量型的有A,A反,B,B反,Z,Z反等信號,除此之外,伺服編碼器還有著跟普通編碼器不同的地方,那就是伺服電機多數為同步
2023-08-25 08:08:541018 
什么是絕對值編碼器?絕對編碼器在幾圈之后仍然可以提供絕對位置,并且在不使用時重置。多翻譯設備包括為用戶提供最佳解決方案的內部傳輸設備。主接口是BISS-C或SSI。對于某些設備來說,某些位置的延遲
2023-09-15 08:09:111602 伺服編碼器這個基本的功能與普通編碼器是一樣的,比如增量型的有A,A反,B,B反,Z,Z反等信號,除此之外,伺服編碼器還有著跟普通編碼器不同的地方,那就是伺服電機多數為同步電機,同步電機啟動的時候需要
2023-09-22 14:19:58499 電機,同步電機啟動的時候需要知道轉子的磁極位置,這樣才能夠大力矩啟動伺服電機,這樣需要另外配幾路信號來檢測轉子的當前位置,比如增量型的就有UVW等信號,正因為有了這幾路檢測轉子位置的信號,伺服編碼器顯得有點復雜了,以致一般人弄
2023-09-25 14:07:17974 編碼器分為旋轉編碼器和線性編碼器兩種。旋轉編碼器用于檢測旋轉位置和速度,而線性編碼器用于檢測直線位置和速度。
2023-12-22 09:20:04381 
伺服電機編碼器是一種關鍵的反饋裝置,用于測量和控制電機的轉速和位置。在選擇伺服電機編碼器時,常常面臨一個選擇:使用磁電編碼器還是光電編碼器。接下來將從幾個關鍵方面比較這兩種類型的編碼器,以幫助您做出更明智的選擇。
2024-01-18 10:29:02464 一些編碼器會在其旋轉軸上標記一個特殊的標記點,例如一個凹槽或凸起。通過在編碼器旋轉到特定位置時對標記點進行檢測,可以確定零位。
2024-01-18 14:49:40221 編碼器零點位置怎么看 要確定編碼器的零點位置,可以通過以下幾種方式進行觀察: 1. 物理標記點:一些編碼器在其旋轉軸上具有專門的物理標記點,例如凹槽或凸起。通過觀察軸上的標記點,可以確定零點位置
2024-02-18 18:28:19731 
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論