剛剛學(xué)習(xí)fpga方面的知識(shí),fpga如何測(cè)量一個(gè)增量式編碼器,消除抖動(dòng)的話是否也是在上升沿和下降沿都進(jìn)行計(jì)數(shù)處理,這樣的話怎樣設(shè)定可以保障計(jì)數(shù)器可以同時(shí)在兩個(gè)always 下進(jìn)行計(jì)數(shù),可以給一下大概的例程最好
2016-01-11 18:27:47
絕對(duì)式編碼器怎么實(shí)現(xiàn)多圈轉(zhuǎn)動(dòng)后的位置獲取
2023-10-10 06:09:45
絕對(duì)式編碼器怎么獲取當(dāng)前轉(zhuǎn)動(dòng)的圈數(shù)
2023-10-09 07:27:27
絕對(duì)式編碼器輸出的位置怎么判斷是否在原點(diǎn)
2023-10-13 07:32:01
為了實(shí)現(xiàn)多對(duì)極磁電式軸角編碼器的高分辨率絕對(duì)式檢測(cè)并降低其成本,基于改進(jìn)格雷碼構(gòu)建了一種新型多極磁電軸角編碼器模型,提出一種基于校準(zhǔn)查表的信號(hào)處理方式,以消除磁場非線性和裝配誤差對(duì)測(cè)量精度
2010-06-02 10:04:24
絕對(duì)編碼器會(huì)直接輸出正在測(cè)量的軸的確切位置。每個(gè)旋轉(zhuǎn)點(diǎn)都具有唯一的位置值或數(shù)據(jù)字,并在隨軸一起旋轉(zhuǎn)的碼盤上編碼。碼盤上唯一代碼的數(shù)量決定了位置的表示精度。編碼器一旦開啟,便立即使用光學(xué)、電容式或磁性
2018-12-20 16:31:09
1、工作方式不同:增量型編碼器斷電后需要回原點(diǎn),它無法輸出軸轉(zhuǎn)動(dòng)的絕對(duì)位置信息,存在零點(diǎn)累計(jì)誤差,抗干擾較差,接收設(shè)備的停機(jī)需斷電記憶,開機(jī)應(yīng)找零或參考位。絕對(duì)編碼器不需要回原點(diǎn),它由機(jī)械位置確定編碼
2023-04-20 16:19:54
這個(gè)編碼器的輸出是相對(duì)位置還是絕對(duì)位置呢
2023-10-15 11:36:36
編碼器接口模式是什么?編碼器配置源碼的配置過程是怎樣的?
2021-11-23 06:03:51
通過plc采集絕對(duì)式編碼器的脈沖信號(hào),其輸出是并口輸出,通過plc輸出的信號(hào)是什么形式,通過什么來實(shí)現(xiàn)到電腦的傳輸???謝謝
2016-05-08 20:48:19
`分類:增量式和絕對(duì)式編碼器。增量式是編碼器軸每轉(zhuǎn)過一個(gè)單位,編碼器就輸出一個(gè)脈沖,故稱之為增量式,英文叫做Increamental;絕對(duì)式編碼器則是以某一點(diǎn)為參考原點(diǎn),數(shù)據(jù)線始終輸出編碼器軸的當(dāng)
2012-02-24 22:03:25
可以分為接觸式和非接觸式兩種;按照工作原理編碼器可分為增量式和絕對(duì)式兩類。在數(shù)字系統(tǒng)里,常常需要將某一信息(輸入)變換為某一特定的代碼(輸出)。把二進(jìn)制碼按一定的規(guī)律編排,例如8421碼、格雷碼等,使
2019-10-13 08:00:00
編碼器是如何進(jìn)行分類的?分為哪幾類?絕對(duì)值編碼器常見故障有哪些?絕對(duì)值編碼器與絕對(duì)式編碼器有什么不同?
2021-07-12 06:41:29
絕對(duì)式編碼器在實(shí)際運(yùn)用中,需要通過哪些過程能傳輸?shù)接?jì)算機(jī),用計(jì)數(shù)細(xì)分卡還是數(shù)據(jù)采集卡,還需要調(diào)理電路嗎,傳輸?shù)挠?jì)算機(jī)是什么形式,謝謝
2016-04-28 09:41:21
一、編碼器的分類根據(jù)檢測(cè)原理,編碼器可分為光學(xué)式、磁式、感應(yīng)式和電容式,根據(jù)其刻度方法及信號(hào)輸出形式,可分為增量式、絕對(duì)式以及混合式三種。1、增量式編碼器 增量式編碼器是直接利用光電轉(zhuǎn)換原理輸出三
2022-01-20 06:47:46
分為接觸式和非接觸式兩種;按照工作原理編碼器可分為增量式和絕對(duì)式兩類。增量式編碼器是將位移轉(zhuǎn)換成周期性的電信號(hào),再把這個(gè)電信號(hào)轉(zhuǎn)變成計(jì)數(shù)脈沖,用脈沖的個(gè)數(shù)表示位移的大小。絕對(duì)式編碼器的每一個(gè)位置對(duì)應(yīng)一個(gè)
2017-11-24 19:00:47
描述C2000? 位置管理器技術(shù)可提供集成式解決方案來連接數(shù)字絕對(duì)編碼器以及旋轉(zhuǎn)變壓器和 SINCOS 傳感器,從而無需使用工業(yè)逆變器和伺服驅(qū)動(dòng)器中常用的附加電路。TIDA-1008 所示的位置
2018-10-23 11:53:04
描述C2000 位置管理器技術(shù)可提供集式解決方案來連接數(shù)字絕對(duì)編碼器以及旋轉(zhuǎn)變壓器和 SINCOS 傳感器,從而無需使用工業(yè)逆變器和伺服驅(qū)動(dòng)器中常用的附加電路。TIDA-1008 所示的位置管理器
2018-10-22 10:14:35
空心軸增量式編碼器 軸增量式編碼器輪轂軸增量式編碼器無軸承增量式編碼器套件/模塊化增量式編碼器光學(xué)增量式編碼器磁增量式編碼器危險(xiǎn)等級(jí)遞增編碼器軸絕對(duì)編碼器輪轂軸絕對(duì)編碼器空心軸絕對(duì)編碼器光學(xué)絕對(duì)編碼器磁絕對(duì)編碼器微型旋轉(zhuǎn)編碼器非接觸式旋轉(zhuǎn)編碼器
2020-07-17 09:54:48
本文以戰(zhàn)術(shù)軍用通信系統(tǒng)的首選碼RS(31,15)碼為例,對(duì)生成多項(xiàng)式進(jìn)行了優(yōu)化,并采用查表法的原理極大地提高了編碼器運(yùn)算數(shù)據(jù)的能力,縮短了運(yùn)算周期,最終利用VHDL語言編譯,在FPGA中實(shí)現(xiàn),得到了正確的RS編譯碼。
2021-05-06 09:27:33
Ⅰ 關(guān)于編碼器編碼器的種類有很多,什么增量式編碼器、絕對(duì)值編碼器,有軸或者無軸編碼器,電壓輸出、推拉輸出、集電極開路輸出等等。但不管什么類型的編碼器,其目的都類似,得到轉(zhuǎn)動(dòng)的角度,角速度、位移等
2020-05-28 08:00:00
STM32F10xxx 正交編碼器接口應(yīng)用筆記 及源代碼1 正交編碼器原理正交編碼器實(shí)際上就是光電編碼器,分為增量式和絕對(duì)式,較其它檢測(cè)元件有直接輸出數(shù)字量信號(hào),慣量低,低噪聲,高精度,高分辨率
2014-03-18 10:03:58
個(gè)人用過伺服+絕對(duì)值編碼器,也用過變頻+絕對(duì)值編碼器,感覺沒什么區(qū)別,首先在連好電纜后在調(diào)試軟件將編碼器型號(hào)參數(shù)填好\下載,都是用手動(dòng)模式移動(dòng)機(jī)構(gòu)位置,到位后當(dāng)前位置直接標(biāo)零點(diǎn),零點(diǎn)丟了再重新標(biāo)定。大家有用過這兩種絕對(duì)值編碼器的嗎?有區(qū)別嗎?
2023-11-14 06:53:37
光柵編碼器可分為兩大類,一是旋轉(zhuǎn)編碼器,用于轉(zhuǎn)角、轉(zhuǎn)速的測(cè)量;二是直尺型編碼器,用于直線位移、運(yùn)動(dòng)速度的測(cè)量。在旋轉(zhuǎn)編碼器中,又可分為絕對(duì)式編碼器和增量式編碼器。
2019-10-18 09:03:30
最近想測(cè)電機(jī)轉(zhuǎn)動(dòng)的角度,第一想到了絕對(duì)式編碼器。。但是沒用過,所以不懂那款絕對(duì)式編碼器可以跟51單片機(jī)連接到一起使用。。求做過或者有經(jīng)驗(yàn)的大神給個(gè)用過的例子參考下。或者給個(gè)建議,我該選用什么型號(hào),什么樣子的編碼器。。。該怎么測(cè)側(cè)角度。。
2016-12-30 20:12:21
、共模電壓、脈沖噪聲等具有高抗擾性的穩(wěn)健數(shù)據(jù)傳輸。 圖1展示了幾類適合工業(yè)應(yīng)用的線性或角度位置反饋編碼器。 圖1:位置反饋編碼器及其對(duì)應(yīng)接口 有兩種類型的位置編碼器:增量型位置編碼器和絕對(duì)型位置編碼器
2018-09-05 16:07:42
樓主大四學(xué)生,沒有接觸過編碼器,有沒有大神提供點(diǎn)編碼器的資料啊。任務(wù)書上寫的是學(xué)習(xí)有關(guān)編碼器的工作原理及相關(guān)知識(shí),掌握編碼器的基本原理及工作方式,了解增量式與絕對(duì)值式編碼器的區(qū)別,特別是零點(diǎn)的確定和正反轉(zhuǎn)的判斷等問題。謝謝各位大神~
2016-05-17 22:19:13
增量式編碼器與絕對(duì)值式編碼器的區(qū)別是什么?直流電機(jī)和交流電機(jī)的區(qū)別是什么?
2021-10-12 06:17:13
增量式與絕對(duì)值編碼器的區(qū)別增量式編碼器增量式編碼器只能記住自己走了多少步,當(dāng)然會(huì)有一個(gè)原點(diǎn)。在開機(jī)第一次走過原點(diǎn)一千,它是不知道自己的位置在什么地方。絕對(duì)值編碼器只要上電就能知道自己現(xiàn)在所處的位置
2021-09-07 08:25:59
(encoder)是將信號(hào)(如比特流)或數(shù)據(jù)進(jìn)行編制、轉(zhuǎn)換為可用以通訊、傳輸和存儲(chǔ)的信號(hào)形式的設(shè)備。編碼器把角位移或直線位移轉(zhuǎn)換成電信號(hào),前者稱為碼盤,后者稱為碼尺。按照讀出方式編碼器可以分為接觸式和非接觸式兩種;按照工作原理編碼器可分為增量式和絕對(duì)式兩類。增量式編碼器是將位移轉(zhuǎn)換成周期性的電信號(hào)
2021-12-01 07:57:34
如何使用編碼器接口實(shí)現(xiàn)定位?
2022-02-11 07:32:50
基于FPGA的絕對(duì)式碼盤智能接口該怎樣去設(shè)計(jì)?
2021-04-28 06:32:55
絕對(duì)值編碼器是什么?安川伺服電機(jī)的絕對(duì)值編碼器數(shù)據(jù)如何讀取?
2021-06-28 09:43:46
我用labview對(duì)海德漢絕對(duì)式編碼器進(jìn)行編程,設(shè)定一個(gè)幾毫秒的采樣周期,將讀取到的位置值經(jīng)過計(jì)算轉(zhuǎn)化成速度值,并有過零判斷,但是讀出的轉(zhuǎn)速值波動(dòng)較大,海德漢25位精度的,本身精度特別高,但是測(cè)試幾百轉(zhuǎn)的轉(zhuǎn)速波動(dòng)能達(dá)到幾十轉(zhuǎn),請(qǐng)問大家遇到過這種情況嗎?有什么可能的原因嗎?萬分感激。
2017-05-05 22:40:54
帶有RS485接口,采用USS通信協(xié)議和PLC通信。松下A5伺服驅(qū)動(dòng)器可以采用RS485或RS232通訊。通過這種方式可以得到絕對(duì)值編碼器實(shí)時(shí)位置,但是由于通訊速度較慢,所以不能用于高速定位場合
2023-11-14 08:16:32
那么是這樣的話,如果是光柵尺,比如說3米長,光柵尺上的絕對(duì)值編碼器上可以找到3米內(nèi)任意位置對(duì)應(yīng)的值。
可是電機(jī)的話,電機(jī)可以不停的轉(zhuǎn),就是說距離可以不停的變大,可是電機(jī)上的絕對(duì)值編碼器如何找出值一一對(duì)應(yīng)這不斷變大(或變小)的位置呢?
2023-11-21 08:30:00
絕對(duì)值編碼器是一種新型絕對(duì)值編碼器,它是用加熱塑壓的方法,將有機(jī)電阻粉壓在絕緣體的凹槽(義:物體表面上凹下的槽)內(nèi)。多圈絕對(duì)值編碼器如果要測(cè)量旋轉(zhuǎn)超過360度范圍,就要用到 多圈絕對(duì)式編碼器。 編碼器
2023-04-20 14:04:39
,就要用到 多圈絕對(duì)式編碼器。 編碼器生產(chǎn)廠家運(yùn)用鐘表齒輪機(jī)械的原理,當(dāng)中心碼盤旋轉(zhuǎn)時(shí),通過齒輪傳動(dòng)另一組碼盤(或多組齒輪,多組碼盤),在單圈編碼的基礎(chǔ)上再增加圈數(shù)的編碼,以擴(kuò)大編碼器的測(cè)量范圍,這樣
2023-04-26 09:21:09
現(xiàn)在要用stm32F407VE采集增量式編碼器的信號(hào),計(jì)算無刷電機(jī)的速度,stm32定時(shí)器的編碼器接口怎么使用
2017-10-28 18:10:06
,被廣泛應(yīng)用于電機(jī)伺服控制系統(tǒng)中。編碼器按信號(hào)輸出形式分為絕對(duì)式編碼器和增量式編碼器。絕對(duì)式光電編碼器具有輸出數(shù)字量可與PC機(jī)、ARM或FPGA等器件直接接口,無累積誤差等優(yōu)點(diǎn),但價(jià)格高、制造工藝復(fù)雜
2019-06-10 05:00:08
單圈絕對(duì)值編碼器 PVS58工業(yè)標(biāo)準(zhǔn)外殼 ?58 mmPROFIBUS 接口16 位,單匝速度傳輸更廣泛的擴(kuò)展功能可編程的限位開關(guān)調(diào)試模式伺服或夾緊法蘭提示:以下是本篇文章正文
2022-11-04 09:34:51
針對(duì)絕對(duì)式光電軸角編碼器在采用CAN 總線通信方式控制系統(tǒng)中的應(yīng)用,提出編碼器數(shù)據(jù)傳輸接口的一種新方法,即通過CAN 總線接口實(shí)現(xiàn)在帶有多傳感器、多分系統(tǒng)的控制系統(tǒng)中數(shù)據(jù)
2009-06-25 14:53:16 28
28 單圈絕對(duì)式編碼器是國際上新出現(xiàn)的光柵編碼技術(shù)之一。它突破了傳統(tǒng)的光柵編碼原理,使用了一種新穎獨(dú)特的黑白條紋編碼方式進(jìn)行角度測(cè)量;它的實(shí)現(xiàn)需要融合傳感器技術(shù)、圖像處
2009-07-06 08:55:0119 單圈絕對(duì)式編碼器采用了獨(dú)特的條紋編碼方式, 突破了傳統(tǒng)的編碼原理, 克服了傳統(tǒng)編碼器實(shí)現(xiàn)的局限性, 并引進(jìn)了最新的傳感器技術(shù)、圖像處理技術(shù)、硬件集成技術(shù)用于系統(tǒng)實(shí)現(xiàn), 取
2009-07-10 09:35:4534 在數(shù)據(jù)采集測(cè)控系統(tǒng)中,用于檢測(cè)的絕對(duì)值角度編碼器的輸出很多是基于SSI接口,采用SSI接口的絕對(duì)值角度編碼器輸出有時(shí)需要連接到多個(gè)不同的獨(dú)立測(cè)控系統(tǒng),由于SSI接口是單訪
2010-08-06 16:52:030 絕對(duì)值編碼器與增量編碼器工作原理非常相似。它是一個(gè)帶有若干個(gè)透明和不透明窗口的轉(zhuǎn)動(dòng)圓盤,用光接收器來收集間斷的光束,光脈沖轉(zhuǎn)換成電脈沖后,由電子輸出電路
2010-10-19 16:55:4944 增量型編碼器與絕對(duì)型編碼器的區(qū)別
編碼器如以信號(hào)原理來分,有增量型編碼器,絕對(duì)型編碼器。 增 量 型 編 碼 器 (旋轉(zhuǎn)
2009-09-26 17:36:29 2348
2348 絕對(duì)編碼器
光電式絕對(duì)編碼器的碼盤如圖12.3.1所示,它是在一塊圓形玻璃上采用腐蝕工藝刻有透光和不透光的碼形,其中黑的區(qū)域?yàn)椴煌腹鈪^(qū),用“0”表示;白的區(qū)域
2009-10-29 23:01:305045 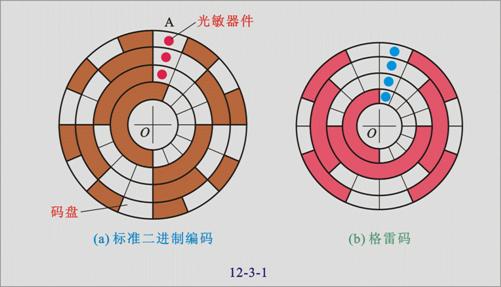
絕對(duì)式光電軸角編碼器CAN總線接口
1 引 言絕對(duì)式光電軸角編碼器是一種數(shù)字測(cè)角裝置,實(shí)時(shí)測(cè)量轉(zhuǎn)軸所處的角位置及角速度,它把軸角信息轉(zhuǎn)換成度、分、
2009-11-04 09:28:111161 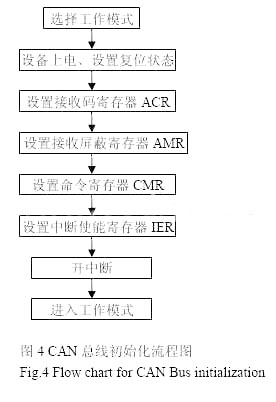
絕對(duì)式光電編碼器基本構(gòu)造及特點(diǎn)
用增量式光電編碼器有可能由于外界的干擾產(chǎn)生計(jì)數(shù)錯(cuò)誤,并且在停電或故障停車后無法找到事
2010-06-02 23:01:284788 本文簡要介紹日本多摩川絕對(duì)式 編碼器 應(yīng)用特點(diǎn)和接口方法,其中重點(diǎn)介紹產(chǎn)品通信協(xié)議和硬件接口電路以及專用的接收芯片AU5561 應(yīng)用方法。
2011-06-16 15:45:5470 1: S7-200 PLC可以連接絕對(duì)型編碼器嗎? 解答:S7-200 PLC可以連接絕對(duì)型編碼器,但應(yīng)注意以下幾點(diǎn): (1)S7-200 PLC可連接并行輸出的絕對(duì)型編碼器。串行輸出、總線型輸出、變送一體型
2011-07-01 15:21:43123 采用CPLD與絕對(duì)式編碼器進(jìn)行高速串行通信,CPLD再把收到的編碼器信息轉(zhuǎn)變?yōu)椴⑿袛?shù)據(jù)傳送給伺服單元中的DSP進(jìn)行運(yùn)算控制,本文將給出CPLD與絕對(duì)式編碼器高速串行通信的軟硬件設(shè)計(jì)方
2011-08-13 14:57:182117 
分析了光電編碼器4倍頻原理,提出了一種基于可編程邏輯器件FPGA對(duì)光電增量式編碼器輸出信號(hào)4倍頻、鑒相、計(jì)數(shù)的具體方法,它對(duì)提高編碼器分辨率與實(shí)現(xiàn)高精度、高穩(wěn)定性的信號(hào)檢測(cè)
2011-11-03 15:13:1675 絕對(duì)編碼器由機(jī)械位置決定的每個(gè)位置是唯一的,它無需記憶,無需找參考點(diǎn),而且不用一直計(jì)數(shù),什么時(shí)候需要知道位置,什么時(shí)候就去讀取它的位置。這樣,編碼器的抗干擾特性、
2011-11-11 16:30:5412146 本文檔詳細(xì)介紹了絕對(duì)式編碼器的測(cè)速度的方法
2016-08-29 14:22:4241 接觸式和非接觸式兩種;按照工作原理編碼器可分為增量式和絕對(duì)式兩類。增量式編碼器是將位移轉(zhuǎn)換成周期性的電信號(hào),再把這個(gè)電信號(hào)轉(zhuǎn)變成計(jì)數(shù)脈沖,用脈沖的個(gè)數(shù)表示位移的大小。絕對(duì)式編碼器的每一個(gè)位置對(duì)應(yīng)一個(gè)確定的數(shù)字碼,因
2017-09-12 19:23:5711 編碼器把角位移或直線位移轉(zhuǎn)換成電信號(hào),前者稱為碼盤,后者稱為碼尺。按照讀出方式編碼器可以分為接觸式和非接觸式兩種;按照工作原理編碼器可分為增量式和絕對(duì)式兩類。
2018-02-05 09:38:4532078 我們將演示用于機(jī)器人和伺服應(yīng)用的電機(jī)驅(qū)動(dòng)和絕對(duì)編碼器之間的EnDat接口解決方案。我們將展示新型ADM3065E收發(fā)器如何通過更高速度來使用更長的編碼器電纜和更高的通信速度。
2018-05-24 15:10:005021 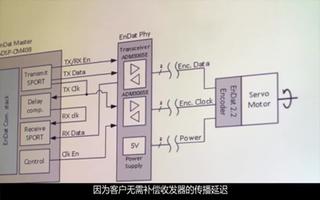
光電編碼器主要有增量式編碼器、絕對(duì)式編碼器、混合式絕對(duì)值編碼器、旋轉(zhuǎn)變壓器、正余弦伺服電機(jī)編碼器等,其中增量式編碼器、絕對(duì)式編碼器、混合式絕對(duì)值編碼器屬于數(shù)字量編碼器,旋轉(zhuǎn)變壓器、正余弦伺服電機(jī)編碼器屬于模擬量編碼器。
2018-10-21 10:32:2914397 絕對(duì)值編碼器是指編碼器內(nèi)部的所有位置值在編碼生成后,其量程內(nèi)所有的位置已經(jīng)“絕對(duì)”地確定在編碼器內(nèi),每一個(gè)位置獨(dú)立并具有唯一性,它的內(nèi)部及外部每一次數(shù)據(jù)讀取,都不依賴于前次的數(shù)據(jù)讀取,無論是編碼器
2018-11-28 10:51:468122 
絕對(duì)值編碼器安裝目前市場上提供的絕對(duì)值編碼器,一般情況下主要 有兩種型號(hào),分別是單圈絕對(duì)值編碼器和多圈絕對(duì)值編碼器,前者在使用過程中轉(zhuǎn)動(dòng)角度不會(huì)超過360度而后者多圈式編碼器在使用中轉(zhuǎn)動(dòng)角度會(huì)超過360度。
2018-12-06 16:49:2212057 絕對(duì)編碼器光碼盤上有許多道光通道刻線,每道刻線依次以2線、4線、8線、16線編排,在編碼器的每一個(gè)位置,通過讀取每道刻線的通、暗,獲得一組從2的零次方到2的n-1次方的唯一的2進(jìn)制編碼(格雷碼),這就稱為n位絕對(duì)編碼器。這樣的編碼器是由光電碼盤的機(jī)械位置決定的,它不受停電、干擾的影響。
2018-12-06 17:12:2152953 對(duì)于絕對(duì)值編碼器的內(nèi)部的“絕對(duì)值”的定義,是指編碼器內(nèi)部的所有位置值,在編碼器生產(chǎn)出廠后,其量程內(nèi)所有的位置已經(jīng)“絕對(duì)”地確定在編碼器內(nèi),在初始化原點(diǎn)后,每一個(gè)位置獨(dú)立并具有唯一性,它的內(nèi)部及外部
2018-12-07 16:33:3427519 了系統(tǒng)硬件和軟件設(shè)計(jì)方案。采用軟件控制單片機(jī)IPO 口模擬時(shí)鐘信號(hào)的方法與編碼器通信, 成功地解決了編碼器接口技術(shù)瓶頸。該電機(jī)定位方案已應(yīng)用于實(shí)際系統(tǒng), 具有精度高、反應(yīng)靈敏、抗干擾能力強(qiáng)等優(yōu)點(diǎn), 能夠滿足大多數(shù)電機(jī)控制系
2019-07-04 17:33:3940 本文主要闡述了增量式編碼器與絕對(duì)式編碼器的區(qū)別。
2019-11-06 14:56:4060889 絕對(duì)式旋轉(zhuǎn)光電編碼器如圖4-13所示,絕對(duì)編碼器由機(jī)械位置決定每個(gè)位置的唯一性,它無須記憶,無須找參考點(diǎn),而且不用一直計(jì)數(shù),什么時(shí)候需要知道位置,什么時(shí)候就去讀取它的位置。這樣,編碼器的抗干擾特性、數(shù)據(jù)的可靠性大大提高,目前已經(jīng)越來越廣泛地應(yīng)用于各種工業(yè)系統(tǒng)的角度、長度測(cè)量和定位控制中。
2019-11-06 16:09:0115772 本文首先闡述了絕對(duì)值編碼器的原理,其次闡述了絕對(duì)式編碼器的特點(diǎn),最后闡述了絕對(duì)值編碼器應(yīng)用。
2019-11-06 16:27:0211171 絕對(duì)編碼器這是能將電動(dòng)機(jī)一轉(zhuǎn)內(nèi)的角度數(shù)據(jù)輸出到外部目標(biāo)的檢測(cè)器。絕對(duì)編碼器一般能夠以8到12位輸出360 °絕對(duì)值編碼器與增量編碼器工作原理非常相似。
2019-12-04 11:06:1826366 旋轉(zhuǎn)編碼器是工業(yè)中重要的機(jī)械位置角度、長度、速度反饋并參與控制的傳感器,旋轉(zhuǎn)編碼器分增量值編碼器、絕對(duì)值編碼器、絕對(duì)值多圈編碼器。
2020-03-12 15:59:054680 現(xiàn)場可編程邏輯陣列(FPGA)資源豐富,結(jié)構(gòu)靈活,近年來發(fā)展迅猛。針對(duì)其特點(diǎn),本文設(shè)計(jì)了基于FPGA的增量式光電編碼器的接口電路,實(shí)現(xiàn)了對(duì)增量式編碼器脈沖信號(hào)的倍頻、鑒相及計(jì)數(shù)等功能。
2021-04-27 13:57:503886 
根據(jù)檢測(cè)原理,編碼器可分為光學(xué)式、磁式、感應(yīng)式和電容式,根據(jù)其刻度方法及信號(hào)輸出形式,可分為增量式、絕對(duì)式以及混合式三種。
2022-12-15 14:17:143908 免電池多轉(zhuǎn)絕對(duì)式機(jī)械編碼器的研制
2023-03-08 10:59:222252 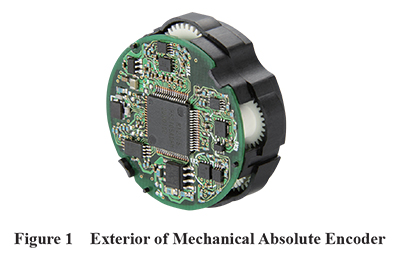
為何伺服廠家都愛選絕對(duì)值編碼器?我們知道,編碼器是伺服系統(tǒng)最為重要的結(jié)構(gòu)之一,也是區(qū)分它與普通電機(jī)的第一要素。通過編碼器結(jié)構(gòu),我們可以反饋電機(jī)的運(yùn)動(dòng)狀態(tài),通過PID算法逐步的降低電機(jī)的運(yùn)動(dòng)誤差,直到
2023-03-13 18:05:041136 增量式編碼器和絕對(duì)值編碼器哪個(gè)好? 編碼器是伺服系統(tǒng)上的重要組成部分,可以發(fā)送脈沖給驅(qū)動(dòng)器,用于運(yùn)動(dòng)位置的矯正,實(shí)現(xiàn)閉環(huán)控制。目前,常見的伺服編碼器類型有增量式編碼器以及絕對(duì)值編碼器兩種,它們哪個(gè)
2023-03-19 23:30:032562 隨著工業(yè)4.0發(fā)展需求,工業(yè)機(jī)器人產(chǎn)業(yè)前所未有的崛起,現(xiàn)在在機(jī)器人控制系統(tǒng)中,伺服電機(jī)扮演者重要角色,這樣一來編碼器重要性尤為突出,下面讓我?guī)Т蠹艺J(rèn)識(shí)一下絕對(duì)編碼器與增量編碼器。
2023-03-28 09:33:31704 隨著工業(yè)4.0發(fā)展需求,工業(yè)機(jī)器人產(chǎn)業(yè)前所未有的崛起,現(xiàn)在在機(jī)器人控制系統(tǒng)中,伺服電機(jī)扮演者重要角色,這樣一來編碼器重要性尤為突出,下面讓我?guī)Т蠹艺J(rèn)識(shí)一下絕對(duì)編碼器與增量編碼器。
2023-03-28 09:27:19552 一、合成二進(jìn)制編碼器 合成二進(jìn)制編碼器的電阻體是用碳膜、石墨、石英粉和有機(jī)粉合劑等配成一種懸浮液,涂在玻璃釉纖維板或膠紙上制作而成。制作工藝簡單,是目前應(yīng)用最廣泛的絕對(duì)值編碼器。合成二進(jìn)制編碼器
2023-04-20 14:21:381598 單圈絕對(duì)值編碼器 PVS78E Mining 旋轉(zhuǎn)編碼是用于檢測(cè)旋轉(zhuǎn)角度及其衍生機(jī)械參數(shù)的一類傳感器,包括速度和加速度等,可檢測(cè)旋轉(zhuǎn)、直線等傳動(dòng)運(yùn)動(dòng)。由于應(yīng)用廣泛,現(xiàn)代旋轉(zhuǎn)編碼器可見于諸多機(jī)械
2023-04-25 14:16:582258 絕對(duì)值編碼器之單圈值型編碼器和多圈值型編碼器的區(qū)別及在回程傳感器上的使用編碼器是一種將信號(hào)或數(shù)據(jù)編譯并轉(zhuǎn)換為可用于通信、傳輸和存儲(chǔ)的信號(hào)形式的設(shè)備,濟(jì)南祥控自動(dòng)化的XKCON祥控回程傳感裝置支持定制
2023-03-22 14:12:211764 
什么是絕對(duì)值編碼器?絕對(duì)值編碼器裝置在多圈旋轉(zhuǎn)后仍然能提供絕對(duì)位置,不用時(shí)歸零。多回轉(zhuǎn)裝置包括內(nèi)部傳動(dòng)裝置,這是給用戶提供最好的解決方案。主接口是BiSS-C或SSI。對(duì)于某些設(shè)備,具體位置載入的延遲可能是一個(gè)難題。
2023-03-24 11:26:182774 
增量型編碼器與絕對(duì)值型編碼器怎么選擇?在進(jìn)行編碼器選擇時(shí),增量型編碼器和絕對(duì)值型編碼器是兩種常見的選擇。增量型編碼器是一種基于脈沖計(jì)數(shù)的編碼器,通常由光電編碼器和霍爾編碼器組成。這種編碼器的主要優(yōu)點(diǎn)
2023-05-08 11:28:331341 
增量式編碼器和絕對(duì)值編碼器有哪些區(qū)別?增量式編碼器通過對(duì)變化量進(jìn)行計(jì)數(shù)來測(cè)量位置變化,而絕對(duì)值編碼器可提供實(shí)際位置值。因此,增量式編碼器對(duì)于測(cè)量無限循環(huán)的運(yùn)動(dòng)比較有用,因?yàn)樗鼈兛梢允褂糜?jì)數(shù)器來跟蹤旋轉(zhuǎn)次數(shù)和速度。相比之下,絕對(duì)值編碼器適用于任務(wù)需要直接獲得位置信息的情景,如機(jī)器人運(yùn)動(dòng)。
2023-07-05 13:34:282249 
絕對(duì)值編碼器是一種用于測(cè)量旋轉(zhuǎn)位置或線性位移的傳感器。與增量編碼器不同,絕對(duì)值編碼器可以提供特定位置的唯一輸出值,而不需要進(jìn)行校準(zhǔn)。這使得絕對(duì)值編碼器在需要高精度位置測(cè)量的應(yīng)用中非常有用,例如機(jī)器人、自動(dòng)化系統(tǒng)和醫(yī)療設(shè)備。
2023-07-26 09:53:329960 什么是絕對(duì)值編碼器?絕對(duì)編碼器在幾圈之后仍然可以提供絕對(duì)位置,并且在不使用時(shí)重置。多翻譯設(shè)備包括為用戶提供最佳解決方案的內(nèi)部傳輸設(shè)備。主接口是BISS-C或SSI。對(duì)于某些設(shè)備來說,某些位置的延遲
2023-09-15 08:09:111602 
類型的編碼器: 單圈絕對(duì)值編碼器和多圈絕對(duì)值編碼器。 (1)單圈絕對(duì)值編碼器: 這種編碼器可以在一個(gè)完整的轉(zhuǎn)動(dòng)周期內(nèi)提供唯一的位置信息。 它們適用于相對(duì)較小的轉(zhuǎn)動(dòng)范圍,例如不超過360度的應(yīng)用。 單圈絕對(duì)值編碼器可以在電
2023-10-23 09:50:02562 
EtherCAT信號(hào)絕對(duì)值編碼器的定義和應(yīng)用
2023-11-08 13:53:08444 EtherCAT信號(hào)絕對(duì)值編碼器是一種新型的編碼器技術(shù),相比于傳統(tǒng)的編碼器技術(shù),具有以下幾個(gè)優(yōu)點(diǎn):
2023-11-08 14:15:58355 26位多圈絕對(duì)值編碼器是什么?26位多圈絕對(duì)值編碼器是一種用于測(cè)量旋轉(zhuǎn)角度的裝置,它可以提供高精度的角度測(cè)量結(jié)果,而且具有較高的可靠性和穩(wěn)定性。下面我們就介紹26位多圈絕對(duì)值編碼器的結(jié)構(gòu)、工作原理以及應(yīng)用領(lǐng)域。
2023-11-08 11:18:08748 
PVM 多圈絕對(duì)值編碼器
2023-11-27 10:00:260 在斷電情況下,單圈絕對(duì)值編碼器相比多圈絕對(duì)值編碼器更容易受到影響。
2024-01-09 09:07:12143
 電子發(fā)燒友App
電子發(fā)燒友App















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論