我們為了實現動態圖像的濾波算法,用串口發送圖像數據到FPGA開發板,經FPGA進行圖像處理算法后,動態顯示到VGA顯示屏上,前面我們把硬件平臺已經搭建完成了,后面我們將利用這個硬件基礎平臺
2019-01-02 16:26:23 4706
4706 10種濾波算法
2017-07-28 11:16:48
包含內容:1.10種軟件濾波的方法 2.單片機數字濾波算法研究3.濾波算法程序
2017-10-13 09:29:02
computation)。源于對鳥群捕食的行為研究。粒子群優化算法的基本思想:是通過群體中個體之間的協作和信息共享來尋找最優解.PSO的優勢:在于簡單容易實現并且沒有許多參數的調節。目前已被廣泛應用于函數優化
2021-07-07 06:04:36
本帖最后由 shkslc 于 2013-10-10 10:25 編輯
跟蹤算法簡介AVT21提供了多種跟蹤算法:質心跟蹤算法(Centroid)、多目標跟蹤算法(MTT)、相關跟蹤算法
2013-09-29 08:59:37
,并具有良好的普適性。因此,AVT31不是單純的視頻目標取差器,而是一個完整的自動視頻跟蹤系統解決方案。內置多種圖像增強預處理算法:白熱、黑熱、雙極性、移動目標檢測等。視頻捕獲:可根據目標的亮度、尺寸
2013-09-05 11:14:16
采集數據中的量化噪聲,在進行數據壓縮前采用濾波的預處理技術。介紹LZW算法和滑動濾波算法的基本理論,詳細闡述用單片FPGA實現兩種算法的方法。最終測試結果表明,該設計方案能夠有效濾除數據中的高頻噪聲
2010-04-24 09:05:21
三方面的視頻;2、就是圖像視頻處理算法,包含目標檢測跟蹤算法、圖像增強、透霧、拼接、電子穩像等算法的程序實現優化工作。3、做出一個可視化界面,在界面上操作這些算法,觀看這些算法的效果。4、做出產品,將算法放到嵌入式系統中,使得這個嵌入式系統具有我們想要的功能,比如目標跟蹤功能。
2016-01-18 16:23:54
迭代實現跟蹤,以及加入放射變換,目標預測,焦點提取功能,以適應更為復雜的環境來跟蹤。后期在PC上調試好,還需在DSP上調試好,具體優化要求還要根據視頻源來定。努力做到最優。
2015-09-09 16:59:45
是測試其提供的例程b.將目標跟蹤算法移植到計算棒中,主要是量化等的工作c.將計算棒接入到目前的RK3399的平臺事項PTZ相機的控制,最終實現視頻會議中目標跟蹤算法
2020-06-30 15:50:16
概率密度的逼近程度來緩解樣本退化問題,通過改進再采樣實現過程來緩解樣本枯竭問題.把新算法應用到INS/GPS組合導航系統中,仿真結果表明新算法的估計性能明顯優于粒子濾波【關鍵詞】:粒子濾波;;最大期望算法
2010-04-24 09:04:09
隨著基于模型設計的廣泛應用,模型在環仿真也逐漸多了起來,我們今天介紹幾種嵌入式常用濾波算法的matlab實現。一、采用數字濾波算法克服隨機干擾的誤差具有以下優點:數字濾波無需其他的硬件成本,只用一個
2021-12-21 08:32:58
卡爾曼濾波算法對比其他的濾波算法有什么優點
2023-10-11 06:42:24
卡爾曼濾波算法是怎么實現對數據的預測處理的
2023-10-10 08:28:02
階段步長調整過程中的不足,實現了對SVS-LMS算法的改進。理論分析和計算機仿真結果表明,本算法的收斂性能優于SVS-LMS算法。另外,還對本算法與VS-LMS算法進行了比較,仿真結果表明本算法在低
2010-04-26 16:12:54
和大小,得到當前幀中目標的尺寸和質心位置。在介紹Intel公司的開源OpenCV計算機視覺庫的基礎上,采用CAMSHIFT跟蹤算法,實現運動目標跟蹤,解決了跟蹤目標發生存在旋轉或部分遮擋等復雜情況下的跟蹤
2014-12-23 14:21:51
目標跟蹤的處理要求。后續的本博客的第二個部分《QT+OpenCv實現在410c開發板上實現視頻目標追蹤預研——(二)粒子濾波算法測試》將在此基礎上,進一步在上位機平臺上搭建粒子濾波視頻目標跟蹤系統對粒子濾波算法性能進行測試,進一步驗證其在DragonBoard 410c平臺上實現的可行性。
2018-09-21 10:42:31
自適應濾波器設計是典型的多參數組合優化問題,利用一種改進的粒子群優化算法(MPSO)來優化設計自適應LMS濾波器.將濾波器設計問題轉化為濾波器參數優化的問題,利用改進的粒子群算法MPSO搜索整個參數
2010-04-26 16:13:08
1、引言 隨著現代高速處理器的迅猛發展,圖像處理技術也日益成熟。其中,移動目標的視頻檢測與跟蹤是圖像處理、分析應用的一個重要領域,是當前相關領域的研究前沿。移動目標視頻檢測與跟蹤技術,在機器人
2019-06-26 06:09:46
` 本帖最后由 ninghechuan 于 2017-9-1 07:04 編輯
在這一篇開篇之前,我需要解決一個問題,上一篇我們實現了基于FPGA的均值濾波算法的實現,最后的顯示效果圖上發現有
2017-09-01 07:04:36
` 本帖最后由 ninghechuan 于 2017-8-30 08:20 編輯
我們為了實現動態圖像的濾波算法,用串口發送圖像數據到FPGA開發板,經FPGA進行圖像處理算法后,動態顯示到
2017-08-28 11:34:10
目標跟蹤算法的研究,并加入噪聲干擾,更接近真實的軍事與民用環境。首先搭建紅外/雷達雙模導引頭仿真平臺,進而設計基于多傳感器的多模型機動目標跟蹤算法,采用擴展卡爾曼濾波,最終實現算法的軟件仿真及跟蹤性能
2018-12-05 15:16:23
作者:Joy Yang1.什么是姿態融合算法簡單來說,姿態融合算法就是融合多種運動傳感器數據(一般需要3軸加速度, 3軸陀螺儀或者3軸地磁感應傳感器),通過數字濾波算法容錯補償,實現當前姿態檢測
2019-07-19 06:47:49
對ADC數據進行濾波可以用中值濾波算法嗎
2023-10-09 06:29:24
前言大家好,我是小麥在往期的文章中,曾經介紹過PWM,SPWM,還有SVPWM的實現,另外還有PID輸入輸出的時間響應;對不同濾波算法的測試,這些如果只通過單純的數據就變得十分的不直觀;這...
2021-11-30 07:43:06
常用的經典濾波算法有哪些??
2012-07-01 15:15:23
怎么評估一個濾波算法的濾波效果
2023-10-10 07:31:46
分布式的濾波器算法是什么?一種基于FPGA分布式算法的濾波器設計實現
2021-04-29 07:13:23
軟件算法實現數字濾波問題:解決方法:數字濾波算法優點:限幅濾波算法:原理描述:適用場景:參考代碼:中值濾波算法:原理描述:適用場景:參考代碼:算術平均濾波算法:原理描述:適用場景:參考代碼:加權平均
2022-01-20 06:58:14
單片機主要作用是控制外圍的器件,并實現一定的通信和數據處理。但在某些特定場合,不可避免地要用到數學運算,盡管單片機并不擅長實現算法和進行復雜的運算。下面主要是介紹如何用單片機實現數字濾波。在單片機
2022-01-18 07:00:34
針對視頻運動參數捕獲系統中標記點無法被正確匹配及跟蹤的問題,提出一種多目標三維立體跟蹤算法。該算法通過二維和三維卡爾曼濾波預測來標記點的位置,并利用三維立體匹
2009-04-08 09:00:55 21
21 為提高含噪視頻序列的質量和效果,提出一種基于開關噪聲檢測與三維中值濾波相結合的開關3-D中值濾波算法。該算法通過判斷視頻序列的每一個像素點,對噪聲點用3-D中值濾波處
2009-04-23 09:32:5617 粒子濾波技術通過非參數化的蒙特卡羅模擬方法實現遞推貝葉斯濾波,適用于非線性目標運動模型、非高斯噪聲的目標跟蹤。在實際應用中,初始粒子選取的精度對濾波效果往往
2009-06-16 11:36:3313 在實際系統中,常用的數據融合方法是基于擴展的卡爾曼濾波算法的融合算法,但是這種融合算法的跟蹤精度并不是很高. 通過對濾波跟蹤型數據融合的研究,提出了基于轉換測量值卡爾
2009-07-14 11:28:0015 一種基于粒子濾波的自適應相關跟蹤算法:相關跟蹤是最常見的一種目標跟蹤方法,但傳統相關跟蹤采取的“峰值”跟蹤方法拋棄了所有小于峰值點相關值的位置點的信息,不夠穩健,受
2009-11-08 16:44:0635 針對被動傳感器陣列中的機動目標跟蹤問題,該文提出了一種基于多模Rao-Blackwellized 粒子濾波的機動目標跟蹤新方法。算法首先基于Rao-Blackwellization 理論將機動目標跟蹤問題劃分為
2009-11-20 15:24:4611 該文提出一種自適應粒子濾波算法。首先建立目標的顏色模型,提出基于加權顏色分布圖的目標顏色模型。采用該模型計算目標模板與粒子區域的相似程度,以此作為對目標物體定
2009-11-24 15:46:1615 針對粒子濾波運算量大,硬件復雜性高的問題,該文提出了一種用于純方位跟蹤的簡化粒子濾波算法,該算法引入了一種新的基于閾值的重采樣方法,降低了硬件實現的復雜度。在
2009-11-25 15:15:439 非線性估計領域的經典算法是擴展Kalman濾波(EKF),它采用了Taylor展開的線性變換來近似非線性模型,因而存在計算量大、實時性差、估計精度低等缺點。而粒子濾波采用一些帶有
2010-01-18 11:42:1428 僅用單一的顏色特征進行跟蹤是大多數跟蹤算法魯棒性不高的主要原因。針對此問題,該文提出一種多特征融合跟蹤算法。該算法利用顏色和紋理特征表示目標,通過均值遷移和粒
2010-02-09 11:39:3719 介紹了3種最基本非線性濾波算法——擴展卡爾曼濾波(EKF)、無跡卡爾曼濾波(UKF)和粒子濾波(PF)算法的理論在機動目標跟蹤中的應用。通過仿真試驗對三者性能進行了分析比較。
2010-07-08 15:34:5616 設計內容:1.了解視頻圖像動態跟蹤的應用背景2.了解視頻圖像動態跟蹤算法的基本原理3.掌握camshift和Meanshift跟蹤算法的基本原理4.編程實現camshift算法并進行實驗驗證
2010-11-16 01:03:4742 本文采用的圖像是256×256大小的灰度圖像,濾波模板3×3大小。如何設計硬件電路來完成上述空域濾波算法,分析上述算法實現過程,可以得出結論,實現空域濾波算法可采用3個三階的FIR濾波器+延時單元來描述。
2011-01-18 12:12:47837 
隨著目標運動的多樣性和復雜化,雷達非線性目標跟蹤算法越來越受到重視。本文對目前 非線性濾波 的主要算法即擴展卡爾曼濾波、不敏卡爾曼濾波、粒子濾波的濾波模型、適用條件
2011-07-11 10:55:1162 針對粒子濾波(Particle filter)算法的粒子衰退和計算量過大問題,提出一種將P-N跟蹤器與粒子濾波算法結合的目標跟蹤方法。首先構造P-N跟蹤器,利用跟蹤器來確定目標區域范圍并輸
2011-09-19 15:33:570 CAMSHIFT算法是一種基于顏色直方圖的目標跟蹤算法。在視頻跟蹤過程中,CAMSHIFT算法利用選定目標的顏色直方圖模型得到每幀圖像的顏色投影圖,并根據上一幀跟蹤的結果自適應調整搜索
2011-11-07 14:47:55923 建立了雙觀測站被動跟蹤系統的非線性濾波模型,通過擴展卡爾曼濾波方法在該非線性模型下的具體實現步驟。分析了目標通過不同角度向觀測站襲來時,卡爾曼濾波算法對目標參數估計的
2012-04-18 15:32:3450 利用粒子濾波實現行人跟蹤是視頻智能監控的主要方法之一,但粒子濾波的粒子退化問題尚未得到一個比較理想的解決方法。本文利用重采樣后的粒子集,構造經驗分布函數,用支持向
2013-08-20 16:57:020 為了解決再入階段的彈道目標跟蹤問題,提出一種修正的強跟蹤濾波算法,即強跟蹤有限差分濾波算法(STFDEKF)。修正的強跟蹤算法做出來以下改進:使用有限差分方法來近似多項式,不需要求解非線性函數的導數;其次,新算法中使用強跟蹤的次優漸消因子對先驗協方差矩陣進行修正。
2015-12-21 10:00:1312 卡爾曼濾波算法C語言實現 可以運行STM32 和 arduino上 已測試成功
2016-09-27 16:34:1667 一種優化高斯粒子濾波的載波頻偏估計算法_焦玲
2017-01-07 18:56:131 基于Kalman濾波器和改進Camshift算法的雙眼跟蹤_王麗
2017-01-07 19:00:391 基于重采樣技術改進的粒子濾波算法_李小婷
2017-01-07 20:49:271 改進的粒子濾波單通道盲分離算法_馬歡
2017-01-08 11:13:290 在QT+OpenCV實現在410c開發板上實現視頻目標追蹤預研系列內容呢的前面兩個博客中已經對目標跟蹤算法的選擇進行了介紹,確定了使用粒子濾波作為視頻目標跟蹤,并在上位機上對粒子濾波算法進行了簡單的測試驗證了采用粒子濾波算法來實現目標跟蹤的可行性。
2017-02-23 10:33:322887 目標跟蹤算法作為一種有著非常廣泛的應用的算法,在航空航天、智能交通、智能設備等領域有著非常廣泛的應用。本系列博客將教大家在410c開發板上基于linux操作系統環境,采用QT+Opencv來實現視頻
2017-02-27 10:32:475141 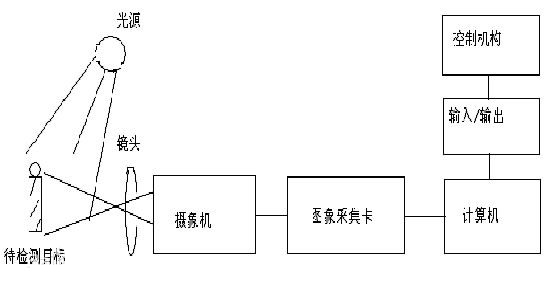
相控陣PD雷達目標檢測的實時空間濾波算法_鄧志象
2017-03-15 09:42:493 改進粒子濾波的無線傳感器網絡目標跟蹤算法_丁婷婷
2017-03-19 19:04:390 基于核相關濾波器的目標旋轉跟蹤算法_李龍
2017-03-19 19:25:560 ) VECx技術以加速電路的計算性能,分析與評估硬件與軟件對實現FIR濾波算法的影響。實驗結果表明,采用硬件等效替代的方法能使單個FIR濾波能
2017-11-03 10:29:5210 特性,增加了樣本的多樣性,克服了重采樣過程中的粒子退化問題,并針對二維平面機動模型進行仿真。仿真實驗表明,本文算法能夠適用于機載無源定位系統,能夠有效的提高濾波精度,跟蹤性能優于經典的粒子濾波算法。
2017-11-08 15:32:321 為了解決 Kalman濾波算法跟蹤精度低,計算量大的問題,提出了光電跟蹤目標的貫序濾波算法。該算法將 Kalman濾波原理拓展到對測量矢量按照俯仰、方位、距離的順序逐個進行濾波處理。并將前一個測量
2017-11-10 16:36:003 -濾波算法是一種高效濾波算法,常用于對勻速直線運動的跟蹤。為了解決船用ARPA雷達追蹤定位實時性和準確性的矛盾,提出使用-濾波算法對目標航跡進行濾波。在確保精度要求的同時,能夠快速定位目標,并計算
2017-11-14 11:43:343 中以先驗概率密度函數作為建議分布所引發的退化問題;運用優化組合重采樣策略保證所有粒子的信息以一定概率得到繼承,維持粒子集中粒子的多樣性。理論分析與仿真結果均表明,改進算法能有效地解決標準粒子濾波存在的粒子退化問題并避免
2017-11-17 17:42:4810 針對經過多次迭代之后粒子濾波因粒子匱乏,對于光照、遮擋與旋轉等問題會出現跟蹤精度下降,甚至失敗等問題,提出了一種似然分布自適應調整ALD方法,根據噪聲因子的大小來自適應調整似然分布狀態,增加先驗
2017-11-21 08:52:120 為解決相關濾波器(CF)在跟蹤快速運動目標時存在跟蹤失敗的問題,提出一種結合了核相關濾波( KCF)跟蹤器和基于光流法的檢測器的長時核相關濾波(LKCF)跟蹤算法。首先,使用跟蹤器跟蹤目標,并計算所
2017-12-05 08:44:400 針對粒子濾波中存在粒子質量低和粒子貧化的問題,提出了一種基于智能粒子濾波的多傳感器信息融合算法。該算法分為兩個模塊,首先,將多傳感器數據發送給相應的粒子濾波計算模塊,以優化粒子分布為目的更新建議分布
2017-12-08 17:08:371 針對基于Cubature粒子濾波的蒙特卡羅定位(CMCL)算法存在的計算量大、實時處理能力較差的問題,提出一種基于自適應多提議分布粒子濾波的蒙特卡羅定位( AMPD-MCL)算法。該算法
2017-12-14 11:43:472 本課題的主要內容是在MATLAB上實現自適應濾波器的設計。課題的具體內容為利用GUI界面設計出濾波器的選擇界面、參數的輸入界面、結果分析圖等。其中濾波器的設計將會用兩種算法實現既LMS算法和RLS算法。
2017-12-14 16:24:4536801 
均值濾波是典型的線性濾波算法,它是指在圖像上對目標像素給一個模板,該模板包括了其周圍的臨近像素(以目標像素為中心的周圍個像素,構成一個濾波模板,即去掉目標像素本身),再用模板中的全體像素的平均值來代替原來像素值。
2017-12-19 15:35:316371 針對標準粒子群優化(PSO)算法在求解過程中存在求解精度低、搜索后期收斂速度慢等問題,提出一種基于粒子濾波重采樣步驟與變異操作相結合的改進PSO算法-RSPSO。該算法充分利用重采樣中具有較大
2017-12-20 16:20:510 對三維點云數據進行曲率估計,并對現有點云雙邊濾波進行改進,增強其魯棒性和保特征性;最后使用改進的雙邊濾波對小尺度噪聲進行光順,實現三維點云數據模型的去噪、光順。與單獨使用雙邊濾波、Fleishman雙邊濾波相比,改進算法
2018-01-05 10:51:022 區域之間的對比度被作為目標評判雙準則,而目標函數(或似然函數)則由兩個準則的加權融合而成。算法是在粒子濾波框架下實現的目標搜索,并采用了模糊邏輯對相似度和對比度的權值進行自適應調節。對人、動物等多個挑戰性運動
2018-01-08 10:39:200 視覺跟蹤問題是當前計算機視覺領域中的熱點問題,而在動態環境中對運動目標進行實時、魯棒的跟蹤是其重要的組成部分,視覺跟蹤在自動監控、人機交互、醫學圖像處理、虛擬現實等領域有著廣泛的應用。常用的用于目標
2018-01-25 11:49:373 針對航拍視頻的特性,對經典的壓縮跟蹤( Compression tracking,CT)算法進行了研究,發現了CT算法在樣本采集和分類取樣步驟中的不足并進行了相應的改進。采用Kalman濾波器預測
2018-02-27 14:17:411 研究了一種基于多線索融合的目標跟蹤算法并在TI DM3730上實現。該算法結合在線AdaBoost和顏色目標跟蹤算法,選用Haar小波和核顏色直方圖兩種特征類型,利用粒子的狀態散度矩陣的行列式
2018-03-05 16:36:121 關鍵詞:DaVinci , SoC , 跟蹤算法 , 視頻 目標跟蹤作為計算機視覺的一個極具挑戰性的研究任務,已被廣泛的應用在人機交互、智能監控、醫學圖像處理等領域中。目標跟蹤的本質是在圖像序列
2018-11-14 11:32:02248 提出了一種實用的圖像濾波算法,即圖像加窗中值濾波算法。在分析經典中值濾波算法基礎上,給出了加窗中值濾波算法的基本原理與實現過程,與經典的鄰域均值濾波器、中值濾波器、Buttenvorth低通濾波器、Wiener濾波器進行了濾波比較實驗,分別從主觀效果及客觀參數計算兩個方面驗證了其優良的濾波性能。
2018-11-30 11:11:224 Mean Shift收斂性分析, 使用收斂后的粒子集表達目標的當前狀態; 以狀態粒子的坐標位置為特征值對其進行Mean Shift 聚類, 作為對目標的量測。 連續跟蹤時, 下一幀的采樣粒子基于上一幀的量測結果產生。 與傳統的基于序貫重要性采樣的粒子濾波方法相比
2018-12-13 16:05:002 為了解決核化相關濾波器( KCF)在復雜場景下魯棒性差的問題,提出了基于自適應組合核(SACK)的目標跟蹤算法。跟蹤任務分為位置跟蹤和尺度跟蹤兩個獨立部分。首先,以線性核和高斯核的自適應組合作為核跟蹤濾波器,構造了SACK權重的風險目標函數。
2018-12-19 14:05:383 本文檔的主要內容詳細介紹的是十大濾波算法的資料介紹包括了:限幅濾波法(程序判斷濾波法),中位值濾波法,算術平均濾波法,遞推平均濾波法(滑動平均濾波法),中位值平均濾波法,限幅平均濾波法,一階滯后濾波法,加權遞推平均濾波法,消抖濾波法,限幅消抖濾波法。
2019-01-04 08:00:0028 為提高分層卷積相關濾波視覺跟蹤算法的實時性能,提出一種稀疏卷積特征的實時目標跟蹤算法。首先,在分析不同層卷積特征的基礎上,采用等間隔采樣的方式提取每個卷積層的稀疏卷積特征;然后,對每個卷積層特征
2019-01-17 15:12:441 性,提出一種基于次優視差的多模濾波目標跟蹤算法。首先,采用目標不確定性橢球投影面積變化最大的方向為次優視差方向,并將其作為機器人視差控制方向;然后,采用多模濾波算法計算目標各種運動方式的概率;其次,對各運動方式的目標狀態進
2019-03-28 13:41:126 這篇文章將非常詳細地介紹計算機視覺領域中的目標跟蹤,尤其是相關濾波類方法,分享一些作者認為比較好的算法。
2019-07-05 10:15:265304 針對純測距條件下移動傳感器網絡中的目標跟蹤冋題,提岀一種基于非線性濾波和多維標度的目標跟蹤算法。根據傳感器和目標之間存在的相對運動,建立帶約束的動態距離模型,利用無跡卡爾曼濾波算法提高模型對距離
2021-03-17 10:50:2011 多模板尺度自適應核相關濾波器( KCF MTSA)跟蹤算法在目標移動模糊、旋轉和尺度變化時跟蹤距離精度與成功率較低。針對該問題,提岀一種結合多特征和尺度估計的改進 KCF MTSA目標跟蹤算法。采用
2021-03-23 15:30:369 中值濾波和多級中值濾波的特點和適用范圍,針對濾波算法的鄰域性特點,設計了基于FPGA的濾波器整體架構,并設計了標準中值濾波和多級巾值濾波兩種濾波算法的FPGA實現方案和功能仿真.同時通過實驗結果對兩種算法的濾波效果進行比
2021-04-01 11:21:4841 傳統相關濾波方法在目標運動模糊和光照變化上取得了一定的魯棒效果,但當目標存在形變、顏色變化、重度遮擋等干擾因素時難以實現跟蹤,魯棒性差,且當目標丟失后不能再恢復,無法實現長時間跟蹤。因此,文中
2021-04-23 14:31:347 目標漏跟。針對該問題,在多伯努利濾波框架下,深度分析目標的特征信息,引λ抗干擾的卷積特征,提出基于卷積特征的多伯努利視頻多目標跟蹤算法,并在目標狀態提取過程中,進一步提岀模板更新,使用自適應學習速率進行更新
2021-05-12 15:18:1111 當被跟蹤目標受變形、遮擋、快速和不規則運動等因素的干擾時,基于單一顏色特征的相關濾波器跟蹤算法難以實現精準的目標定位。為此,分析基于多通道顏色特征 Color Names(CN)的核相關濾波器算法
2021-05-27 15:51:509 針對傳統相關濾波跟蹤器在目標尺度變化和部分遮擋時效果不佳等問題,基于KCF提出了一種全局塊與局部塊協作的分塊跟蹤算法。該算法首先根據目標的外觀特征,對跟蹤目標進行水平或垂直分抉,并分別訓練兩個局部
2021-05-28 16:44:192 標準粒子濾波算法用于無線傳感器網絡運動目標跟蹤時,非高斯噪聲環境會降低其跟蹤精度和計算效率。針對該問題,結合多傳感器測量模型和 Kullback- Leibler距離(KLD)采樣方法,提出一種
2021-06-02 16:21:044 結合卡爾曼濾波等的四旋翼無人機目標跟蹤算法
2021-06-23 15:00:1924 對象跟蹤問題一直是計算機視覺的熱點任務之一,簡單的可以分為單目標跟蹤與多目標跟蹤,最常見的目標跟蹤算法都是基于檢測的跟蹤算法,首先發現然后標記,好的跟蹤算法必須具備REID的能力。今天小編斗膽給大家推薦一個結合傳統算法跟深度學習,特別好用的對象跟蹤算法框架DeepSort
2022-09-14 16:20:052188 粒子濾波器方法通常用于視覺跟蹤。從統計角度來看,它是一種順序蒙特卡羅重要抽樣方法,用于根據觀測序列估計動態系統的潛狀態變量。 粒子濾波步驟: 初始狀態:用大量粒子模擬X(t),粒子在空間內均勻分布
2023-01-13 10:17:331045 該項目包含使用高級綜合 (HLS) 的 2D 中值濾波器算法的實現。該項目的目標是在不到 3 ms的時間內對測試圖像進行去噪,同時消耗不到 25% 的可用 PL 資源。
2023-07-12 15:19:44718 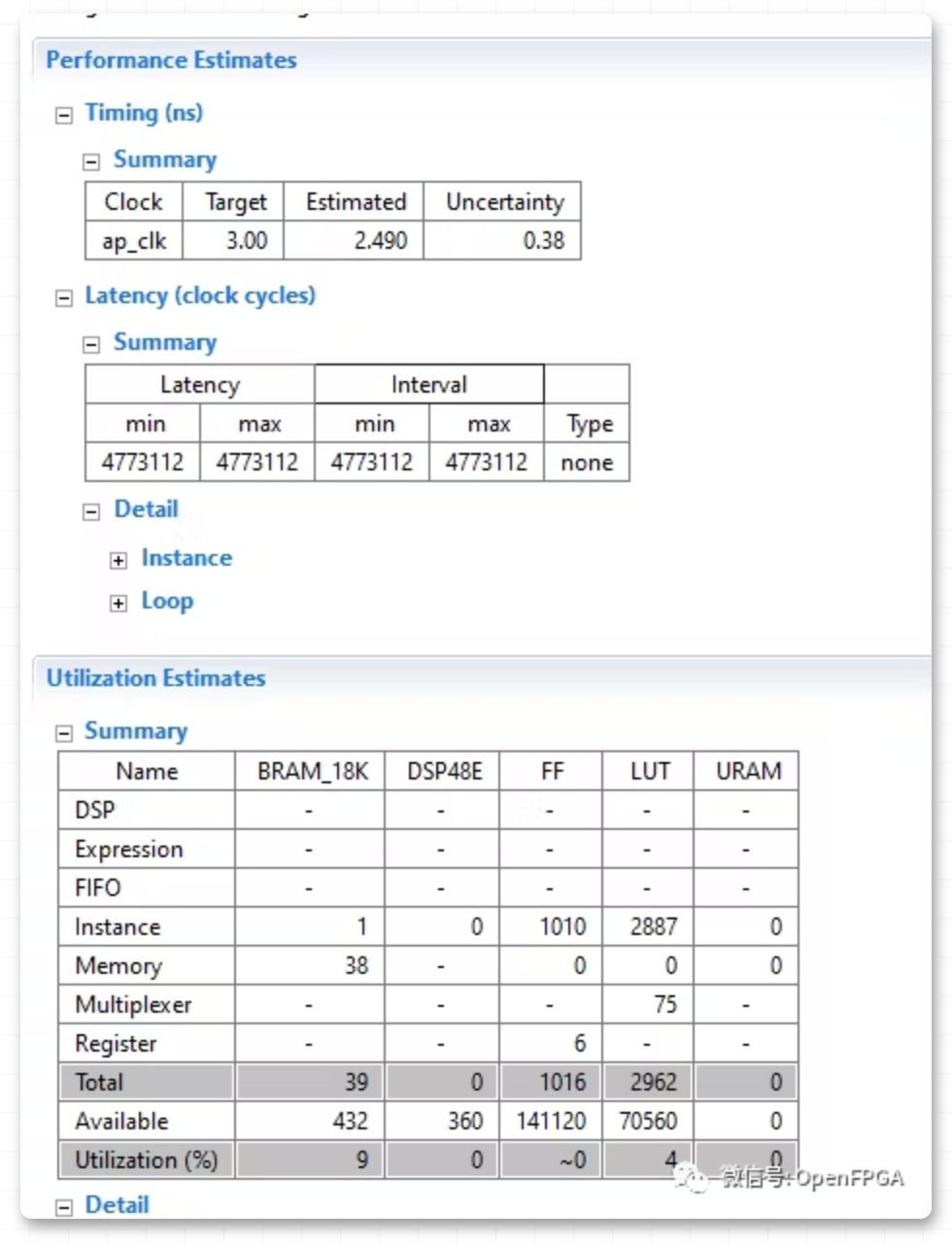
將再啰嗦一次,詳解從均值濾波到非局部均值濾波算法的原理及實現方式。 細數主要的2D降噪算法,如下圖所示,從最基本的均值濾波到相對最好的BM3D降噪,本文將盡量用最同屬的語言,詳解這些算法的實現流程,并給予一定的 FPGA 加速實現的實現
2023-12-19 16:30:02242
 電子發燒友App
電子發燒友App











 工商網監
工商網監
評論