 電子發(fā)燒友App
電子發(fā)燒友App


這里分享一個(gè)前一段時(shí)間寫的一個(gè)單片機(jī)程序。程序的主要功能是對(duì)鋰電池充放電模塊的鋰電池電壓和輸出電壓進(jìn)行檢測(cè),并將檢測(cè)后的電壓用數(shù)碼管進(jìn)行顯示。
程序的主控芯片是STM8S103F3P。用的是下圖的最小系統(tǒng)板。
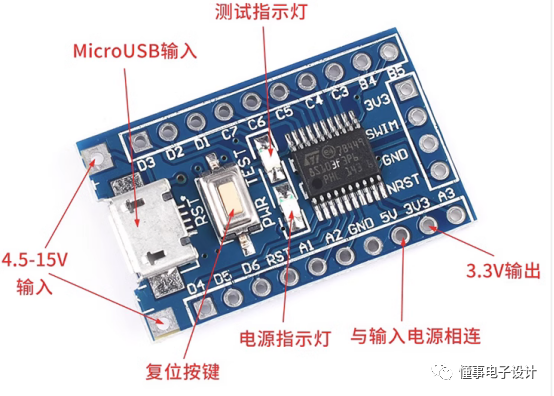
基本參數(shù)如下:
1、核心尺寸:8bit
2、速度:16MHz
3、連接性:12C,IrDA,LIN,SPI, UART/USART
4、外設(shè):欠壓檢測(cè)/復(fù)位,POR,PWM,WDT
5、I/0數(shù):16
6、程序存儲(chǔ)容量:8KB(8Kx8)
7、程序存儲(chǔ)器類型:閃存FLASH 可擦寫一萬次
8、EEPROM容量:640x8
9、RAM容量:1Kx8
10、電壓-電源(Vcc/Vdd): 2.95V~5.5V
11、數(shù)據(jù)轉(zhuǎn)換器:A/D 5x10b
12、振蕩器類型:內(nèi)部
13、工作溫度:-40°C~85°C(TA)
數(shù)碼管顯示部分用的是TM1637驅(qū)動(dòng)的數(shù)碼管模塊。該模塊是一個(gè)12腳的帶時(shí)鐘點(diǎn)的4位共陽數(shù)碼管(0.36英寸)的顯示模塊,驅(qū)動(dòng)芯片為TM1637,只需2根信號(hào)線即可使單片機(jī)控制4位8段數(shù)碼管。
模塊特點(diǎn)如下: 顯示器件為4位共陽紅字?jǐn)?shù)碼管; 數(shù)碼管8級(jí)灰度可調(diào); 控制接口電平可為5V或3.3V; 4個(gè)M2螺絲定位孔,便于安裝。
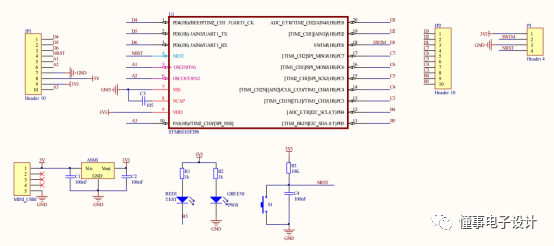
數(shù)碼管模塊的: CLK引腳與PB4引腳相連; DIO引腳與PB5引腳相連。
由于本次使用的單片機(jī)的ADC部分為3.3V供電,而鋰電池電壓和輸出電壓都大于3.3V,所以這里通過串接電阻分壓的方式來實(shí)現(xiàn)電壓的檢測(cè)。程序中分別使用單片機(jī)ADC的通道2、通道3、通道4對(duì)輸入端電壓、鋰電池電壓及輸出端電壓進(jìn)行檢測(cè)。
程序中利用單片機(jī)的定時(shí)器4進(jìn)行采樣周期定時(shí),采樣時(shí)間到后程序控制ADC進(jìn)行電壓采集和計(jì)算,并進(jìn)行了10次累加求平均值,最后將采集的電壓轉(zhuǎn)換為實(shí)際電壓進(jìn)行顯示。
主程序部分如下:
?
/** ****************************************************************************** * @file Project/main.c * @author MCD Application Team * @version V2.1.0 * @date 18-November-2011 * @brief Main program body ****************************************************************************** * @attention * * THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS * WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE * TIME. AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY * DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING * FROM THE CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE * CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS. * ******************************************************************************* */ /* Includes ------------------------------------------------------------------*/ #include "stm8s.h" #include "TM1637.h" #include "math.h" /* Private defines -----------------------------------------------------------*/ /* Private function prototypes -----------------------------------------------*/ /* Private functions ---------------------------------------------------------*/ //#define LED_GPIO_PORT (GPIOB) //#define LED_GPIO_PINS (GPIO_PIN_5) //定時(shí)電壓結(jié)構(gòu)體 typedef struct { float in_vol ; float out_vol ; float bat_vol ; } voltage ; uint8_t ad_buf[10] ; uint16_t sleep_cnt = 0 ; void Init_ADC(void) { //GPIO_Init(GPIOC, GPIO_PIN_4, GPIO_MODE_IN_FL_NO_IT); //單次掃描模式 /*ADC1_DeInit(); ADC1_Init(ADC1_CONVERSIONMODE_SINGLE, ADC1_CHANNEL_2, ADC1_PRESSEL_FCPU_D2, ADC1_EXTTRIG_TIM, DISABLE, ADC1_ALIGN_RIGHT, ADC1_SCHMITTTRIG_ALL, ENABLE); ADC1_Cmd(ENABLE);*/ //連續(xù)掃描模式 ADC1_DeInit();//ADC 相關(guān)寄存器恢復(fù)默認(rèn)值 //初始化 ADC:連續(xù)轉(zhuǎn)換/通道 8/時(shí)鐘分頻/關(guān)閉事件/數(shù)據(jù)右對(duì)齊/使能施密特觸發(fā)器 ADC1_Init(ADC1_CONVERSIONMODE_SINGLE, ADC1_CHANNEL_5, ADC1_PRESSEL_FCPU_D2, ADC1_EXTTRIG_TIM, DISABLE, ADC1_ALIGN_RIGHT, ADC1_SCHMITTTRIG_ALL,ENABLE);//該處在串口發(fā)送及接收時(shí)需配置為ENABLE,否則會(huì)出現(xiàn)無法發(fā)送的現(xiàn)象。 ADC1_ScanModeCmd(ENABLE); ADC1_Cmd(ENABLE);//使能 ADC } uint16_t i=0; uint8_t sample_flag = 0 ; uint8_t sample_cnt = 0 ; voltage m_state ; /* Private defines -----------------------------------------------------------*/ /* Private function prototypes -----------------------------------------------*/ /* Private functions ---------------------------------------------------------*/ void Init_GPIO(void) { GPIO_Init(GPIOB, GPIO_PIN_5, GPIO_MODE_OUT_PP_LOW_FAST); } void Init_Timer4(void) { /*TIM4_UpdateDisableConfig(ENABLE);//允許更新事件 TIM4_ARRPreloadConfig(ENABLE);//自動(dòng)重裝 TIM4_ITConfig(TIM4_IT_UPDATE, ENABLE);//中斷配置,更新中斷 TIM4_SetCounter(0xff);//計(jì)數(shù)器初值 TIM4_SetAutoreload(0xFF);//計(jì)數(shù)器自動(dòng)重裝的初值 TIM4_PrescalerConfig(TIM4_PRESCALER_128, TIM4_PSCRELOADMODE_UPDATE);//預(yù)分頻值 */ TIM4_TimeBaseInit(TIM4_PRESCALER_128, 0x82); /* Clear TIM4 update flag */ TIM4_ClearFlag(TIM4_FLAG_UPDATE); /* Enable update interrupt */ TIM4_ITConfig(TIM4_IT_UPDATE, ENABLE); TIM4_Cmd(ENABLE); } void main(void) { // ErrorStatus clk_return_status; //FlagStatus flag_status; u16 u16_adc1_value1 ; u16 u16_adc1_value2 ; u16 u16_adc1_value3 ; u16 display_cnt = 0 ; float last_input = 0 ; float last_output = 0 ; /* Configuration -----------------------------------------*/ CLK_HSIPrescalerConfig(CLK_PRESCALER_HSIDIV1);//不分頻 CLK_HSICmd(ENABLE); //開始內(nèi)部高頻RC Init_ADC(); Init_Timer4(); enableInterrupts(); GPIO_init(); //TM1637_display(0x00,0x00,0,0x00,0x01); sleep_cnt = 0 ; while (1) { if(sample_flag==1) { sample_flag = 0 ; /* ADC1_StartConversion(); flag_status = ADC1_GetFlagStatus(ADC1_FLAG_EOC); u16_adc1_value = ADC1_GetConversionValue();*/ ADC1_StartConversion();//開啟一次轉(zhuǎn)換 while(!ADC1_GetFlagStatus(ADC1_FLAG_EOC));//等待轉(zhuǎn)換完成 ADC1_ClearFlag(ADC1_FLAG_EOC);//軟件清除 u16_adc1_value1+=(u16)ADC1_GetBufferValue(ADC1_SCHMITTTRIG_CHANNEL2);//讀取AIN2的值 u16_adc1_value2+=(u16)ADC1_GetBufferValue(ADC1_SCHMITTTRIG_CHANNEL3);//讀取AIN4的值 u16_adc1_value3+=(u16)ADC1_GetBufferValue(ADC1_SCHMITTTRIG_CHANNEL4);//讀取AIN4的值 sample_cnt ++ ; if(sample_cnt>=10) { sample_cnt = 0 ; m_state.in_vol = (u16_adc1_value1 / 10)*0.03223*1.4545 ; m_state.out_vol = (u16_adc1_value2 / 10)*0.03223*3.2 ; m_state.bat_vol = (u16_adc1_value3 / 10)*0.03223*2 ; u16_adc1_value1 = 0 ; u16_adc1_value2 = 0 ; u16_adc1_value3 = 0 ; } display_cnt++; } if(display_cnt>999&&sleep_cnt < 10) { display_cnt=0; TM1637_display((int)m_state.bat_vol/10%10,(int)m_state.bat_vol%10,(int)m_state.out_vol/10%10,(int)m_state.out_vol%10,0x01); sleep_cnt ++ ; }else if(sleep_cnt>=9) { if(((last_output-m_state.out_vol)>0.5)||((m_state.in_vol-last_input)>0.8)) { sleep_cnt = 0 ; } last_input = m_state.in_vol ; last_output = m_state.out_vol ; TM1637_display(21,21,21,21,0); } } } #ifdef USE_FULL_ASSERT /** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval : None */ void assert_failed(u8* file, u32 line) { /* User can add his own implementation to report the file name and line number, ex: printf("Wrong parameters value: file %s on line %d ", file, line) */ /* Infinite loop */ while (1) { } } #endif /******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
© COPYRIGHT 2011 STMicroelectronics
?
審核編輯:劉清










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論