的車輛交替運(yùn)行,每次通行時(shí)間都設(shè)為25秒;2.要求黃燈先亮5秒,才能變換運(yùn)行車道;3.黃燈亮?xí)r,要求每秒鐘閃亮一次 。 設(shè)計(jì)原理與參考電路交通燈控制系統(tǒng)的原理框圖如圖12、1所示。它主要由控制器
2008-07-21 11:20:25
請(qǐng)問(wèn)如何使用Vhdl進(jìn)行交通燈控制電路設(shè)計(jì)
2022-03-07 08:20:21
交通燈控制邏輯設(shè)計(jì)n 1、紅、綠、黃發(fā)光二極管作信號(hào)燈,用傳感器或邏輯開(kāi)關(guān)作檢測(cè)車輛是否到來(lái)的信號(hào),實(shí)驗(yàn)電路用邏輯開(kāi)關(guān)代替。n 2、主干道處于常允許通行的狀態(tài),支干道有車來(lái)時(shí)才允許通行。主干道亮綠
2017-09-15 10:25:06
AT89C51單片機(jī)交通燈控制器的設(shè)計(jì) (1)加強(qiáng)對(duì)單片機(jī)控制的基礎(chǔ)理論知識(shí),理論運(yùn)用于實(shí)際,掌握單片機(jī)設(shè)計(jì)的基本方法、步驟。(2)掌握MSC51系列單片機(jī)芯片各個(gè)端口功能、運(yùn)用。(3)研究交通
2013-04-16 10:48:50
交通燈控制系統(tǒng) 畢業(yè)設(shè)計(jì),求破。求程序和仿真
2016-04-07 01:28:54
`交通燈控制系統(tǒng)模擬設(shè)計(jì)一、實(shí)驗(yàn)?zāi)康脑O(shè)計(jì)一個(gè)交通信號(hào)燈模擬控制系統(tǒng),使其能模擬城市“十字”路***通信號(hào)燈的功能,并能進(jìn)行某些特殊控制。二、實(shí)驗(yàn)內(nèi)容與步驟1、在十字路口上,交通信號(hào)燈的變化是固定
2015-06-06 22:05:23
求大神指導(dǎo)關(guān)于MAX7219驅(qū)動(dòng)模塊的程序如何編寫(xiě)設(shè)計(jì)遙控交通燈控制系統(tǒng),系統(tǒng)能夠?qū)崿F(xiàn)交通指示燈的功能,通過(guò)數(shù)碼管指示剩余時(shí)間,其相關(guān)信息同時(shí)在LCD上顯示,且兼有時(shí)鐘日歷功能。裝置可通過(guò)遙控器實(shí)現(xiàn)
2017-03-26 12:05:33
圖3:十字路***通指示燈示意圖 圖4:交通燈控制系統(tǒng)硬件框圖 3、硬件設(shè)計(jì) 本系統(tǒng)硬件上采用AT89C52單片機(jī)和可編程并行接口芯片8155,分別控制圖2所示的四個(gè)組合
2020-07-16 10:54:09
大家快來(lái)看看這設(shè)計(jì)的交通燈系統(tǒng)
2015-09-12 21:42:14
交通燈中紅燈和綠燈時(shí)間控制.紅燈和綠燈的時(shí)間不同分別是20s和25s.
2012-12-10 21:16:13
怎么設(shè)計(jì)交通燈設(shè)計(jì)
2013-12-26 19:45:50
`交通燈控制系統(tǒng)實(shí)現(xiàn)紅綠燈、人行道以及左轉(zhuǎn)彎和右轉(zhuǎn)彎控制,并且根據(jù)檢測(cè)的車輛流量自動(dòng)調(diào)整通行時(shí)間`
2014-06-06 17:50:48
來(lái)源:網(wǎng)絡(luò)無(wú)線傳感器網(wǎng)絡(luò)促進(jìn)智能交通的發(fā)展智能交通系統(tǒng)(ITS)應(yīng)用在城市交通中主要體現(xiàn)在微觀的交通信息采集、交通控制和誘導(dǎo)等方面,通過(guò)提高對(duì)交通信息的有效使用和管理來(lái)提高交通系統(tǒng)的效率,主要是由
2014-11-21 17:44:52
、遺傳算法等)計(jì)算出最佳方案,并輸出控制信號(hào)給執(zhí)行子系統(tǒng)(一般是交通信號(hào)控制器),以引導(dǎo)和控制車輛的通行,達(dá)到預(yù)設(shè)的目標(biāo)。 無(wú)線傳感器網(wǎng)絡(luò)是一種融合短程無(wú)線通訊技術(shù)、微電子傳感器、嵌入式系統(tǒng)的新技術(shù)
2018-11-14 16:35:35
無(wú)線傳感器網(wǎng)絡(luò)是什么?無(wú)線傳感器網(wǎng)絡(luò)的顯著特點(diǎn)是什么?無(wú)線傳感器網(wǎng)絡(luò)主要應(yīng)用于哪些領(lǐng)域?
2021-05-24 06:17:04
無(wú)線傳感器網(wǎng)絡(luò)是由部署在監(jiān)測(cè)區(qū)域內(nèi)部或附近的大量廉價(jià)的、具有通信、感測(cè)及計(jì)算能力的微型傳感器節(jié)點(diǎn)通過(guò)自組織構(gòu)成的“智能”測(cè)控網(wǎng)絡(luò)[1][2]。無(wú)線傳感器網(wǎng)絡(luò)在軍事、農(nóng)業(yè)、環(huán)境監(jiān)測(cè)、醫(yī)療衛(wèi)生、工業(yè)
2020-03-10 06:45:08
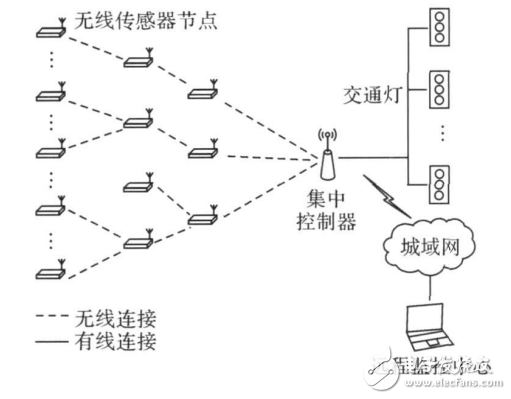
時(shí)間進(jìn)行自適應(yīng)性調(diào)整,造成了道路資源的浪費(fèi)。本文設(shè)計(jì)了一種基于無(wú)線傳感器網(wǎng)絡(luò)的自適應(yīng)交通燈控制系統(tǒng),利用安裝在各車道上的攜帶超聲波收發(fā)模塊的傳感器節(jié)點(diǎn)探測(cè)車流量,流量信息通過(guò)無(wú)線通信方式匯聚到集中控制器
2018-11-08 16:19:27
無(wú)線傳感網(wǎng)絡(luò)技術(shù)是典型的具有交叉學(xué)科性質(zhì)的軍民兩用戰(zhàn)略高技術(shù),可以廣泛應(yīng)用于GF軍事、國(guó)家安全、環(huán)境科學(xué)、交通管理、災(zāi)害預(yù)測(cè)、醫(yī)療衛(wèi)生、制造業(yè)、城市信息化建設(shè)等領(lǐng)域。無(wú)線傳感器網(wǎng)絡(luò)(WSNs)是由
2019-07-01 06:25:23
1 kHz(2 g)驗(yàn)證系統(tǒng)采集的傳感器信號(hào)波形和自適應(yīng)數(shù)字傳感器采集的傳感器波形對(duì)比圖,從圖中可以看出自適應(yīng)數(shù)字傳感器能夠自動(dòng)調(diào)整程控放大器的增益來(lái)控制傳感器的輸出,突出了自適應(yīng)數(shù)字傳感器的增益自動(dòng)
2018-11-08 16:23:11
AVR單片機(jī)——交通燈控制系統(tǒng)(程序+原理圖)
2012-08-17 16:13:15
MRAS無(wú)速度傳感器矢量控制系統(tǒng) 現(xiàn)在對(duì)高性能電機(jī)的變頻調(diào)速一般采用矢量控制或者直接轉(zhuǎn)矩控制。而轉(zhuǎn)速的觀測(cè)和閉環(huán)控制是重要的控制環(huán)節(jié)。模型參考自適應(yīng)法(MRAS)就是其中使用頻率較高的一種
2016-01-04 15:39:35
自適應(yīng)控制的交流傳動(dòng)系統(tǒng)7.1擁有轉(zhuǎn)子磁鏈自適應(yīng)觀測(cè)器的矢量控制系統(tǒng)、7.2帶有參數(shù)辨識(shí)器的參數(shù)自校正矢量控制系統(tǒng)7.3轉(zhuǎn)子時(shí)間常數(shù)自校準(zhǔn)的矢量控制系統(tǒng)7.4無(wú)速度傳感器矢量控制系統(tǒng)的轉(zhuǎn)速推算
2009-03-30 17:28:48
at89c51單片機(jī)_交通燈控制系統(tǒng)(含源碼及仿真圖)ZYY
2012-08-14 00:10:40
介紹了基本的認(rèn)知概念,回顧了該領(lǐng)域的不同研究方法,并提出了無(wú)線傳感器網(wǎng)絡(luò)的一個(gè)通用的認(rèn)知架構(gòu)。討論物理層面的認(rèn)知無(wú)線電和使用多輸入/多輸出系統(tǒng)和協(xié)同分集技術(shù)的動(dòng)態(tài)頻譜接入。討論物理層(自適應(yīng)調(diào)制和功率分配)和媒體訪問(wèn)層(自適應(yīng)睡眠)的聯(lián)合適應(yīng)性。
2014-11-17 09:50:59
繼續(xù)通行;紅燈亮?xí)r,禁止車輛通行。設(shè)計(jì)目的:設(shè)計(jì)這款交通燈模擬系統(tǒng)可以真實(shí)直觀的反映出十字路口紅綠燈亮滅情況,有利于駕駛員學(xué)習(xí)相關(guān)的交通規(guī)則,連接上相應(yīng)的硬件設(shè)備還可以作為一款十字路口的交通燈控制系統(tǒng)
2011-12-31 11:17:20
交通控制系統(tǒng)目的:掌握步進(jìn)指令并行分支和并行匯合的具體使用;學(xué)會(huì)用PLC步進(jìn)指令進(jìn)行設(shè)計(jì),掌握狀態(tài)轉(zhuǎn)移圖的畫(huà)法;熟悉實(shí)訓(xùn)設(shè)備的外部接線。內(nèi)容:交通燈控制要求:(1)該單元設(shè)有啟動(dòng)和停止開(kāi)關(guān)S1、S2
2017-11-27 21:07:14
分享一款不粗的一種基于CPLD的交通燈控制系統(tǒng)設(shè)計(jì)
2021-05-07 06:51:29
單片機(jī)控制交通燈單片機(jī)控制交通燈
2013-05-05 18:10:34
單片機(jī)模擬交通燈控制系統(tǒng)設(shè)計(jì)
2012-08-17 15:21:54
基于51單片機(jī)的交通燈控制系統(tǒng)設(shè)計(jì),單片機(jī)自主學(xué)習(xí)項(xiàng)目*設(shè)計(jì)分析 —模擬LED交通燈**一、開(kāi)發(fā)背景與需求1 開(kāi)發(fā)背景交通事業(yè)蓬勃發(fā)展,交通流量年年增長(zhǎng),道路交通繁忙,經(jīng)常有嚴(yán)重堵車現(xiàn)象,特別是在
2021-07-15 06:16:30
、溫度、濕度、噪音和有害氣體濃度等物理現(xiàn)象),并對(duì)這些信息進(jìn)行處理后以無(wú)線的方式發(fā)送出去,通過(guò)無(wú)線網(wǎng)絡(luò)最終發(fā)送給觀察者。無(wú)線傳感器網(wǎng)絡(luò)在軍事偵察、環(huán)境監(jiān)測(cè)、醫(yī)療護(hù)理、智能家居、工業(yè)生產(chǎn)控制以及商業(yè)等
2018-10-31 17:19:13
。控制執(zhí)行Agent對(duì)各交叉路口智能控制結(jié)果進(jìn)行執(zhí)行。 2.2 基于無(wú)線傳感器網(wǎng)的交通信號(hào)控制 無(wú)線傳感網(wǎng)是集計(jì)算機(jī)、通信、網(wǎng)絡(luò)、智能計(jì)算、傳感器、嵌入式系統(tǒng)、微電子等多個(gè)領(lǐng)域交叉綜合的新興學(xué)科
2011-08-11 09:17:09
的確定和各路口之間的相位差,自適應(yīng)地控制車輛通行時(shí)間,從而保證車輛通行質(zhì)量,實(shí)現(xiàn)交通信號(hào)控制的智能化、網(wǎng)絡(luò)化。路口控制模式直線位移傳感器傳統(tǒng)的路口控制模式是定時(shí)控制,先進(jìn)的路口控制模式有模糊控制、綠波
2014-11-21 17:49:49
基于AT89C51單片機(jī)的交通燈控制系統(tǒng)設(shè)計(jì)
2012-08-14 11:38:09
本帖最后由 eehome 于 2013-1-5 09:45 編輯
基于FPGA技術(shù)的交通燈控制系統(tǒng)設(shè)計(jì)
2012-08-19 23:19:17
十字路口的交通燈有緊急暫停可以用4*4矩陣鍵盤輸入
2019-04-28 20:20:18
環(huán)境自主完成制定任務(wù)的“智能”自治測(cè)控網(wǎng)絡(luò)系統(tǒng)。由于無(wú)線傳感器網(wǎng)絡(luò)長(zhǎng)期在無(wú)人值守的狀態(tài)下工作,無(wú)法經(jīng)常為傳感器節(jié)點(diǎn)更換電源,因此能耗成為無(wú)線傳感器網(wǎng)絡(luò)設(shè)計(jì)的關(guān)鍵問(wèn)題之一,在系統(tǒng)設(shè)計(jì)時(shí)必須盡可能降低系統(tǒng)
2020-04-28 06:49:00
應(yīng)用VHDL語(yǔ)言設(shè)計(jì)數(shù)字系統(tǒng),大部分設(shè)計(jì)工作可在計(jì)算機(jī)上完成,從而縮短系統(tǒng)開(kāi)發(fā)時(shí)間,提高工作效率。下面介紹基于VHDL設(shè)計(jì)交通燈控制器的一種方案,并給出源程序和仿真結(jié)果。
2019-10-18 07:21:51
`求用labview做十字路口的交通燈要有倒計(jì)時(shí)能改時(shí)間能手動(dòng)控制交通燈 類似于這個(gè)`
2015-06-01 10:00:09
系統(tǒng)要求:可用紅、黃、綠三種顏色發(fā)光二極管和兩位LED數(shù)碼管模擬交通燈的變化規(guī)律:1. 首先,東西路口紅燈亮,同時(shí)開(kāi)始60秒倒計(jì)時(shí);2. 南北路口“直行”綠燈亮,同時(shí)開(kāi)始40秒倒計(jì)時(shí),南北人行道綠燈
2018-07-04 17:23:44
文章目錄0、前言【1】、功能【2】所用工具1、代碼2、原理圖3、過(guò)程0、前言【1】、功能十字路口的交通燈控制系統(tǒng),四組燈(紅黃綠)對(duì)應(yīng)十字路口的四個(gè)方向,用兩位的數(shù)碼管顯示剩余的時(shí)間。【2】所用
2021-11-18 07:00:45
基于單片機(jī)的交通燈控制系統(tǒng)設(shè)計(jì)摘 要當(dāng)你路過(guò)一個(gè)十字路口時(shí),你是否注意到各個(gè)方向車輛和行人有有條不紊的通過(guò)十字路口。這樣井然有序的情境靠什么來(lái)實(shí)現(xiàn)的呢?靠的是交通燈控制系統(tǒng)。在論文中我使用單片機(jī)
2021-07-19 09:37:31
)正常方式嚴(yán)格按照上述要求設(shè)計(jì)成具有數(shù)碼顯示功能,延時(shí)時(shí)間符合表中的要求的交通燈控制系統(tǒng)。(2)急車強(qiáng)通控制方式做成有急救車的交通燈控制系統(tǒng)電路,也即是當(dāng)急救車到來(lái)時(shí)南北東西路口全亮紅燈,行人和車輛都
2011-07-15 18:06:53
文章根據(jù)目前車輛夜間遠(yuǎn)近光切換不及時(shí),易造成車輛前方非機(jī)動(dòng)車駕駛員和行人產(chǎn)生炫目的現(xiàn)象,提出了一種利用紅外攝像技術(shù)和毫米波雷達(dá)測(cè)距技術(shù)的自適應(yīng)遠(yuǎn)光燈控制系統(tǒng)。該系統(tǒng)利用紅外攝像和雷達(dá)獲取車輛前方的路面信息,通過(guò)控制器的內(nèi)置算法計(jì)算出車輛當(dāng)前時(shí)刻以及下一時(shí)刻的遠(yuǎn)近光照明狀態(tài)
2022-03-25 10:27:33
設(shè)計(jì) 智能交通勸導(dǎo)系統(tǒng)的組成如圖1所示,主要由交通燈狀態(tài)檢測(cè)模塊、行人狀態(tài)檢測(cè)模塊及語(yǔ)音提示模塊三部分組成。 其中,交通燈狀態(tài)檢測(cè)模塊采用光頻轉(zhuǎn)換顏色傳感器TCS3200設(shè)計(jì),用來(lái)檢測(cè)交通燈的狀態(tài)
2018-11-05 15:45:12
過(guò)傳動(dòng)比換算出步進(jìn)電機(jī)應(yīng)轉(zhuǎn)動(dòng)的角度,根據(jù)0.36°的步距角就可以算出相應(yīng)的脈沖數(shù)。2 軟硬件實(shí)現(xiàn)該LED交通燈采用二個(gè)步進(jìn)電機(jī)驅(qū)動(dòng),一個(gè)光電傳感器,一個(gè)蓄電池,還有一個(gè)主控制器。光電傳感器用于采集現(xiàn)場(chǎng)
2011-07-13 15:24:10
設(shè)計(jì)要求(1)利用51單片機(jī)設(shè)計(jì)一個(gè)交通燈控制系統(tǒng),來(lái)實(shí)現(xiàn)行人與車流的分流的目的。該系統(tǒng)主要應(yīng)用在十字路口,縱向?yàn)橹鞲傻溃瑱M向?yàn)橹Ц傻溃唬?)主、支干道交替通行,兩個(gè)干道上的交通燈工作方式同時(shí)進(jìn)行
2021-11-09 08:00:51
模糊自適應(yīng)PID控制原理及結(jié)構(gòu)是什么?如何去設(shè)計(jì)恒溫箱溫度控制系統(tǒng)硬件電路?
2021-05-07 07:05:16
交通信號(hào)燈是城市交通安全、有序、快速運(yùn)行的重要保障。本文提出一種基于單片機(jī)的交通信號(hào)燈控制系統(tǒng)的設(shè)計(jì)方案。該系統(tǒng)模擬現(xiàn)實(shí)中十字路口的通行指示,倒計(jì)時(shí)、緊急車輛通行、強(qiáng)制東西/南北通行、夜間模式燈
2021-11-09 08:46:53
設(shè)計(jì)交通燈實(shí)現(xiàn)如現(xiàn)實(shí)交通燈的功能,及用數(shù)碼管顯示紅黃綠燈的倒計(jì)時(shí)讀秒。
2019-10-10 03:32:42
IEEE 802.15.4標(biāo)準(zhǔn)是什么?怎么實(shí)現(xiàn)無(wú)線傳感器網(wǎng)絡(luò)?無(wú)線傳感器網(wǎng)絡(luò)在車位控制中的應(yīng)用是什么
2021-05-13 06:38:02
怎么實(shí)現(xiàn)基于51單片機(jī)的交通燈的控制設(shè)計(jì)?
2021-09-23 08:03:07
課程設(shè)計(jì)任務(wù)書(shū)及成績(jī)學(xué)生姓名 于鳳明班級(jí)學(xué)號(hào)1606030113課程名稱單片機(jī)課程設(shè)計(jì)題目交通燈控制設(shè)計(jì)課程設(shè)計(jì)目標(biāo)與任務(wù)、計(jì)劃與進(jìn)度安排:實(shí)踐教學(xué)要求與任務(wù):1、了解交通燈的基本工作原理;2、用
2021-07-13 07:01:58
智能家居控制網(wǎng)絡(luò)有哪些性能?怎樣去設(shè)計(jì)一種基于無(wú)線傳感器網(wǎng)絡(luò)和電力線通訊的智能家居控制系統(tǒng)?
2021-09-23 07:46:14
基于51單片機(jī)的智能交通燈控制系統(tǒng)仿真,含有程序和PROTEUSW仿真文件!
2014-05-07 15:32:33
智能交通燈控制系統(tǒng)要求能根據(jù)車流量調(diào)整紅綠燈時(shí)間,這里需要用到傳感器嗎?如果經(jīng)過(guò)簡(jiǎn)單的處理,好像可以不用傳感器,但是要用到比較復(fù)雜的算術(shù)運(yùn)算程序,請(qǐng)問(wèn)有沒(méi)有人有這方面的資料啊?謝謝!
2013-03-26 12:20:07
基于FPGA的交通燈智能控制十字路口的交通燈有緊急暫停功能可以用4*4矩陣鍵盤輸入聯(lián)系QQ1227450190
2019-04-28 23:37:25
本人是剛?cè)腴T的,做了一個(gè)交通燈,有車流檢測(cè),想通過(guò)串口,實(shí)現(xiàn)PC對(duì)交通燈狀態(tài)的控制,以及讀取交通燈狀態(tài)、車流檢測(cè)數(shù)量,用的是TTL,直連引腳,不懂得怎么做,求高人指點(diǎn)
2016-05-28 23:57:10
求基于LABview的交通燈設(shè)計(jì)十字路口的 顯示倒計(jì)時(shí)能手動(dòng)控制交通燈在前置面板能改時(shí)間
2015-05-31 22:39:21
什么是無(wú)線傳感器網(wǎng)絡(luò)(WSN)技術(shù)?無(wú)線傳感器網(wǎng)絡(luò)監(jiān)測(cè)的是什么?超聲波傳感器如何適應(yīng)您的無(wú)線傳感器網(wǎng)絡(luò)?
2021-05-18 07:02:19
電子研發(fā)的GSM無(wú)線照明亮化控制系統(tǒng),具備遙測(cè)、遙信、遙控的三遙功能,融合了GSM通信技術(shù),智能控制技術(shù),現(xiàn)場(chǎng)傳感器檢測(cè)技術(shù),微電腦芯片技術(shù),具有技術(shù)性高,擴(kuò)展性
2022-02-14 09:38:14
近年來(lái)網(wǎng)絡(luò)技術(shù)的快速發(fā)展為高級(jí)控制提供了廣闊的應(yīng)用前景。網(wǎng)絡(luò)化控制系統(tǒng)受到了廣泛的關(guān)注。本文基于本課題組開(kāi)發(fā)的網(wǎng)絡(luò)化控制系統(tǒng),提出了一種自適應(yīng)控制方案。實(shí)驗(yàn)
2009-07-30 14:36:57 13
13 無(wú)線傳感器網(wǎng)絡(luò)應(yīng)用場(chǎng)合拓?fù)浣Y(jié)構(gòu)復(fù)雜,針對(duì)特定路徑數(shù)據(jù)雙向傳輸?shù)男枨螅岢隽艘环N加權(quán)的自適應(yīng)無(wú)線傳感器網(wǎng)絡(luò)路由協(xié)議,并針對(duì)協(xié)議建立了相應(yīng)的仿真模型。仿真結(jié)果表明
2009-11-23 11:50:2211 針對(duì)網(wǎng)絡(luò)控制系統(tǒng)中網(wǎng)絡(luò)時(shí)延補(bǔ)償?shù)膯?wèn)題,提出了一種模糊自適應(yīng)PID控制器的設(shè)計(jì)方法,通過(guò)利用在線時(shí)延估計(jì)方法對(duì)時(shí)延進(jìn)行預(yù)估計(jì),根據(jù)估計(jì)時(shí)延值在線調(diào)節(jié)PID三個(gè)參數(shù),從而改善系
2010-07-13 16:05:218 交通燈控制系統(tǒng)電路圖
2008-05-22 09:36:12 5299
5299 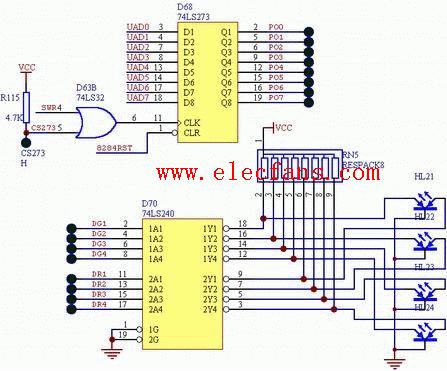
基于FPGA技術(shù)的交通燈控制系統(tǒng)設(shè)計(jì)
交通燈是城市交通監(jiān)管系統(tǒng)的重要組成部分,對(duì)于保證機(jī)動(dòng)車輛的安全運(yùn)行,維持城市道路的順暢起到了重要作用。目前很
2009-05-13 11:28:352028 
什么是汽車自適應(yīng)巡航控制系統(tǒng)
自適應(yīng)巡航控制系統(tǒng)與前面介紹的巡航控制電子系統(tǒng)的不同之處是,自適應(yīng)巡航控制系統(tǒng)增加了防止
2010-03-17 13:34:173715 無(wú)線傳感器網(wǎng)絡(luò)電源智能控制系統(tǒng)設(shè)計(jì)
無(wú)線傳感器網(wǎng)絡(luò)(Wireless Sensor Network,WSN)是一種由傳感器節(jié)點(diǎn)構(gòu)成的網(wǎng)絡(luò),能夠?qū)崟r(shí)地監(jiān)測(cè)、感知和采集節(jié)點(diǎn)部署區(qū)的觀察者感興
2010-04-08 16:23:201107 
提出了一種基于模糊控制的交叉路口交通燈控制系統(tǒng)。該模糊控制系統(tǒng)以單交叉路車長(zhǎng)、車長(zhǎng)之差為輸入,以綠燈延時(shí)為輸出。并簡(jiǎn)單介紹了基于單片機(jī)的智能交通控制系統(tǒng)的實(shí)現(xiàn)。驗(yàn)
2011-12-14 11:52:54107 為實(shí)現(xiàn)城市道路資源優(yōu)化配置,在LabVIEW軟件平臺(tái)上對(duì)基于獨(dú)立交叉口的自適應(yīng)交通控制系統(tǒng)進(jìn)行了仿真研究。該系統(tǒng)以交通信號(hào)燈對(duì)車輛的行與停進(jìn)行管制,同時(shí)根據(jù)各路段實(shí)時(shí)車流量
2012-10-10 14:56:4934 自適應(yīng)控制系統(tǒng),有需要的朋友可以下來(lái)看看
2016-04-13 15:29:420 智能交通的設(shè)計(jì),緩解城市壓力,加強(qiáng)城市交通安全,基于plc交通燈控制系統(tǒng)設(shè)計(jì)。
2016-05-19 17:19:0717 無(wú)線傳感器網(wǎng)絡(luò)的系統(tǒng)化自適應(yīng)建模_鐘杰卓
2017-01-08 10:47:210 單片機(jī)控制的交通燈控制系統(tǒng)設(shè)計(jì)c
2017-05-21 10:15:4445 交通燈控制系統(tǒng)設(shè)計(jì)
2017-09-21 14:36:3452 本文從無(wú)線傳感器網(wǎng)絡(luò)基于路由協(xié)議的擁塞控制技術(shù)入手,改進(jìn)AODV路由協(xié)議,提出了擁塞和能量自適應(yīng)的無(wú)線傳感器網(wǎng)絡(luò)路由協(xié)議WSNCA-AODV。通過(guò)節(jié)點(diǎn)緩存利用率、擁塞因子確定節(jié)點(diǎn)擁塞狀態(tài);通過(guò)
2017-12-26 14:47:070 本文主要介紹了一種基于STC89S52的智能交通燈控制系統(tǒng)的設(shè)計(jì)與應(yīng)用。該系統(tǒng)由STC89S52和復(fù)位電路、時(shí)鐘電路、信號(hào)燈控制顯示電路、數(shù)碼管控制顯示電路及按鍵控制電路等功能模塊組成,并采用Proteus平臺(tái)對(duì)交通燈控制系統(tǒng)的虛擬仿真。通過(guò)試驗(yàn)證明本文設(shè)計(jì)的智能交通燈控制系統(tǒng)滿足系統(tǒng)總體功能。
2018-01-08 17:10:216713 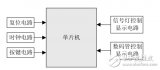
本文主要介紹了一種基于嵌入式的智能交通燈控制系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)。汽車數(shù)量越來(lái)越多,道路壓力越來(lái)越大,城市道路交錯(cuò)分布,交通燈是城市交通的重要指揮系統(tǒng)。交通信號(hào)燈作為管制交通流量、提高道路通行能力的有效
2018-01-09 10:58:0011431 
本文主要介紹了基于LabVIEW的交通燈控制系統(tǒng)設(shè)計(jì)與仿真。傳統(tǒng)的十字路口交通控制系統(tǒng)中,一般只采用紅綠黃燈分方向輪流控制形式,沒(méi)有考慮到實(shí)時(shí)的各方向路面車流輛情況,緊急突發(fā)事件的應(yīng)急處理等,這樣
2018-01-09 11:39:0639901 
本文主要介紹了自適應(yīng)模糊神經(jīng)網(wǎng)絡(luò)的交通燈控制系統(tǒng)的設(shè)計(jì)。針對(duì)我國(guó)城市交通的現(xiàn)狀,機(jī)動(dòng)車輛數(shù)量越來(lái)越多,而傳統(tǒng)的交通信號(hào)燈控制模式采用的是定時(shí)控制,本文將模糊控制技術(shù)引入交通信號(hào)控制,實(shí)現(xiàn)交通燈的自適應(yīng)控制,通過(guò)大量的模糊數(shù)據(jù)輸入,對(duì)神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練,以達(dá)到全局優(yōu)化的調(diào)度。
2018-01-09 13:49:042747 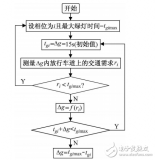
本文主要介紹了一種以STC89C52單片機(jī)為核心,通過(guò)Zigbee模塊遙控進(jìn)行無(wú)線控制的智能交通燈控制系統(tǒng),交警可通過(guò)無(wú)線遙控來(lái)實(shí)現(xiàn)紅綠燈時(shí)間長(zhǎng)短的改變以適應(yīng)不同的交通狀況和人群數(shù)量,同時(shí)數(shù)碼管顯示紅綠燈剩余時(shí)間,充分體現(xiàn)了物聯(lián)網(wǎng)的控制思想并擁有一定的應(yīng)用價(jià)值和市場(chǎng)前景。
2018-01-09 15:47:032792 
的發(fā)展。特別是最近幾年來(lái)才興起的模糊自適應(yīng)控制系統(tǒng),智能自適應(yīng)控制系統(tǒng)和基于神經(jīng)元網(wǎng)絡(luò)的自適應(yīng)控制系統(tǒng)得到了迅速的發(fā)展,引起了人們的普遍關(guān)注。
2018-03-27 10:26:1646896 本文檔的主要內(nèi)容詳細(xì)介紹的是交通燈定時(shí)控制系統(tǒng)的設(shè)計(jì)資料說(shuō)明。
2020-06-28 08:00:001 自適應(yīng)前照燈控制系統(tǒng)(Adaptive Front-lighting System,簡(jiǎn)稱AFS)是一種智能燈光調(diào)節(jié)系統(tǒng)。
2021-06-11 13:36:535107 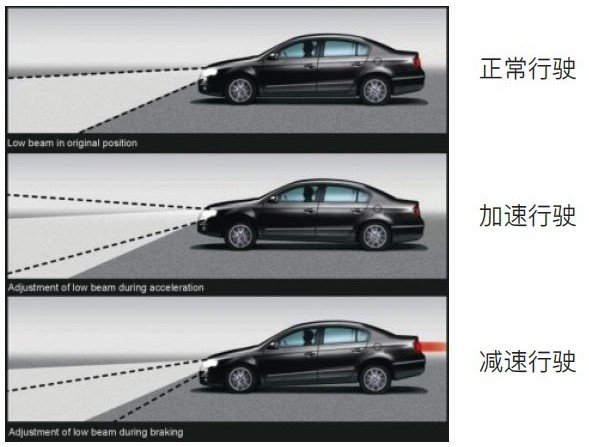
基于Moore型狀態(tài)機(jī)的交通燈控制系統(tǒng)
2021-06-17 09:14:1322 利用AT89C51數(shù)字電路集成芯片,設(shè)計(jì)一個(gè)交通燈控制系統(tǒng),并在電路仿真軟件實(shí)現(xiàn)相關(guān)結(jié)果。1.2設(shè)計(jì)要求(1)可以控制橫道亮綠燈,豎道亮紅燈,兩者交替改變,互不矛盾;(2)給交通燈控制系統(tǒng)設(shè)置一個(gè)控制開(kāi)關(guān),用來(lái)控制系統(tǒng)緊急暫停通行;
2023-01-03 14:18:2313 1.1?設(shè)計(jì)要求1.1.1?設(shè)計(jì)任務(wù)?利用Qt-Creator編程實(shí)現(xiàn)各個(gè)路口紅綠燈及時(shí)間顯示,設(shè)計(jì)一個(gè)交通燈控制系統(tǒng)。1.1.2?性能指標(biāo)要求?(1)按照題目要求使用Qt編程,獨(dú)立設(shè)計(jì)系統(tǒng)所需界面
2023-02-28 09:24:202 交通燈控制系統(tǒng)功能介紹交通燈是城市交通中不可缺少的重要工具,是城市交通秩序的重要保障。本系統(tǒng)就是實(shí)現(xiàn)常見(jiàn)十字路交通燈功能。利用NI公司的虛擬儀器軟件平臺(tái)LabView設(shè)計(jì)一個(gè)能實(shí)現(xiàn)人機(jī)交互的智能交通
2023-04-20 15:23:4710 電子發(fā)燒友網(wǎng)站提供《基于ARM9交通燈控制系統(tǒng)的設(shè)計(jì).pdf》資料免費(fèi)下載
2023-10-12 09:51:500
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論