近年來,嵌入式發展迅速,采用51單片機死循環的事件觸發編程方式已逐漸不能滿足企業對產品穩定性和安全性的要求。在實際應用中,往往會面臨同時應付多外設、多任務的情況,則對它們的相互調度必不可少。時間觸發
2014-01-03 10:13:42 1182
1182 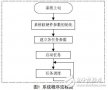
嵌入式python c++ 盡管C / C ++編程語言有很多缺點,但它們在嵌入式系統編程中占主導地位。 另一方面,Python具有許多優勢,使其成為嵌入式系統的絕佳語言。 讓我們看一下每種
2021-12-15 07:14:56
嵌入式系統傳統編程模式有哪幾種嵌入式系統傳統編程方法的困境是什么AnyWhere有什么特點?
2021-04-28 06:17:46
程序秘訣》 · ProgrammingEmbeddedSystemsinCandC++《嵌入式系統編程》 · 《高質量C++/C編程指南》林銳 5、Arm 體系結構· 《ARM 嵌入式系統開發-軟件設計
2020-10-29 07:36:20
什么是嵌入式系統?嵌入式微處理器有哪些特點?與通用型計算機系統相比,嵌入式計算機系統具有哪些特點?
2021-04-26 07:21:48
。由于嵌入式系統應用中,對象系統的廣泛性與單片機的獨主發展道路,使嵌入式系統應用在客觀上存在兩種模式,從學科建設上,可統一成嵌入式系統應用的高低端。 關鍵詞:嵌入式系統發展史 嵌入式系統定義 應用模式
2019-06-18 06:53:07
嵌入式系統概要嵌入式系統概要1.嵌入式系統的概念及特點2.嵌入式硬件3.嵌入式系統軟件4.嵌入式系統編程模式5.微控制器的程序開發方式嵌入式系統概要1.嵌入式系統的概念及特點2.嵌入式硬件3.嵌入式系統軟件4.嵌入式系統編程模式5.微控制器的程序開發方式...
2021-12-22 07:21:41
嵌入式系統裸機編程的內存管理
2021-04-02 06:18:07
獨立工作的器件。 嵌入式系統的軟件部分包括操作系統軟件(要求實時和多任務操作)和應用程序編程。操作系統控制著應用程序編程與硬件的交互作用,而應用程序控制著系統的運作和行為。
2019-07-17 07:34:06
嵌入式系統編程與設計
2014-02-21 20:55:00
蓬勃發展的行業之一。但是,實時嵌入式系統的特點使得其軟件受時間和空間的嚴格限制,加上運行環境復雜,使得嵌入式系統軟件的開發變得異常困難。為了設計一個滿足功能、性能和時間要求的安全可靠的高性能嵌入式系統
2013-02-23 10:47:28
,加上運行環境復雜,使得嵌入式系統軟件的開發變得異常困難。 為了設計一個滿足功能、性能和時間要求的安全可靠的高性能嵌入式系統,編程語言的選擇十分重要。
2019-07-22 08:18:51
第一學習階段,主要打好基礎,學好C編程,Linux系統編程。1、C語言編程基礎2、嵌入式開發基礎:Linux概述安裝,shell命令,vim編輯器,GCC,GDB,Makefile,交叉開發環境構建
2021-11-05 09:22:48
D3.31、嵌入式網絡編程==嵌入式Linux C系統編程(文件、進程、進程間通信、多線程、網絡、大并發網絡服務器、數據庫、shell編程)2、嵌入式C開發VS嵌入式Linux C:使用Linux
2021-12-22 07:44:11
嵌入式學習--基礎準備***嵌入式環境安裝***1、 ubuntu18.042、虛擬機***嵌入式學習的八大步驟及方法***一:嵌入式 c 語言二:Linux 基礎三:Linux 系統編程四
2021-11-09 09:12:50
從系統的觀點來看,嵌入式實時系統也是系統,特別是硬件技術的快速發展,嵌入式實時軟件也有快速適應硬件型號升級問題,也有業務快速變更要求以及可伸縮、可修改、可復用等方面的問題。但面向對象技術對于實時性、可靠性的描述并不適合,在嵌入式實時應用中依然不是主流設計方法,從而引入了模式的概念。
2019-10-08 11:35:54
LININX開發第一學習階段,主要打好基礎,學好C編程,Linux系統編程。1、C語言編程基礎;2、嵌入式開發基礎:Linux概述安裝,shell命令,vim編輯器,GCC、GDB、Makefile,交叉開發環境構建;3、嵌入式Linux系統編程:shell編程,文件編程,串口編程,進程編程,線程編程
2021-12-24 06:21:47
c語言嵌入式系統編程技巧Let’s understand what’s an Embedded Development? 讓我們了解什么是嵌入式開發? Development
2021-12-15 08:26:57
不一樣的。不同于一般形式的軟件編程,基于特定的硬件平臺嵌入式系統編程的,勢必要求其編程語言具備較強的硬件直接操作能力。毫無疑問,匯編語言是具備這種特點的。然而,由于該語言編寫開發過程的復雜性,它通常不
2017-07-25 10:25:17
程序也是不一樣的。不同于一般形式的軟件編程,基于特定的硬件平臺嵌入式系統編程的,勢必要求其編程語言具備較強的硬件直接操作能力。毫無疑問,匯編語言是具備這種特點的。然而,由于該語言編寫開發過程的復雜性,它
2017-06-28 10:14:58
具有高級語言的易編程性,具代表性的應用就是UNIX操作系統,從20世紀80年代中期C語言涉足實時系統之后,就受到了普遍的歡迎,是目前使用廣泛的嵌入式系統編程語言。 C++在支持現代軟件工程、oop
2023-05-18 10:08:35
D2.25嵌入式網絡編程+嵌入式Linux系統一、Linux操作系統安裝與使用(命令)二、Linux開發工具(gcc、gdb、make)三、Linux系統編程(文件、進程、線程、網路、數據庫
2021-12-22 07:10:18
目前,RTOS特別是搶先式RTOS在嵌入式系統中的應用越來越廣泛,但是還有很大一部分產品使用是小型單片機。這些系統由于成本的限制,通常資源非常有限,比如ROM往往小丁32 KB,RAM小于2 KB
2020-04-02 06:58:33
改進型步進式穩壓電源電路圖
2008-11-05 22:39:24
初次發帖,時間觸發嵌入式系統,幫助初學者理解時間片的含義。
2012-05-16 13:31:14
C.&.C.嵌入式系統編程
2012-11-02 13:31:58
C.&.C.嵌入式系統編程.....
2012-10-23 22:29:50
C.&.C.嵌入式系統編程.pdf
2013-03-13 15:56:27
C語言嵌入式系統編程
2012-08-18 07:48:34
C語言嵌入式系統編程
2012-08-20 22:46:56
本帖最后由 zgzzlt 于 2012-8-16 13:03 編輯
C語言嵌入式系統編程修煉
2012-08-12 17:35:05
C語言嵌入式系統編程修煉
2012-08-06 15:24:16
C語言嵌入式系統編程修煉之道
2012-08-15 12:43:47
C語言嵌入式系統編程修煉之道
2012-08-20 08:08:48
不同于一般形式的軟件編程,嵌入式系統編程建立在特定的硬件平臺上,勢必要求其編程語言具備較強的硬件直接操作能力。無疑,匯編語言具備這樣的特質。但是,歸因于匯編語言開發過程的復雜性,它并不是嵌入式
2012-08-01 22:45:43
C語言嵌入式系統編程技巧不同于一般形式的軟件編程,嵌入式系統編程建立在特定的硬件平臺上,勢必要求其編程語言具備較強的硬件直接操作能力。無疑,匯編語言具備這樣的特質。但是,歸因于匯編語言開發
2009-12-23 10:40:21
C語言嵌入式系統編程注意事項C語言嵌入式系統軟件架構單任務程序典型架構
2021-02-03 07:44:49
C語言嵌入式編程修煉之道 不同于一般形式的軟件編程,嵌入式系統編程建立在特定的硬件平臺上,勢必要求其編程語言具備較強的硬件直接操作能力。無疑,匯編語言具備這樣的特質。但是,歸因于
2009-10-31 14:09:51
的技巧。在我們的修煉旅途中將經過25個關口,這些關口主分為兩類,一類是技巧型,有很強的適用性;一類則是常識型,在理論上有些意義。So, let’s go.C語言嵌入式系統編程注意事項之軟件架構篇模塊
2020-04-16 10:00:23
用的C語言語法產生差異,由美國國家標準局為C語言訂定了一套完整的國際標準語法,稱為ANSI C,作為C語言最初的標準。 C語言嵌入式系統編程注意事項不同于一般形式的軟件編程,嵌入式系統編程建立在特定
2017-12-10 11:00:51
protel 99 se 鼠標縮放功能改進型請大家下載這個
2014-03-19 20:00:40
怎么學習Linux系統編程框架學習方法、內核向用戶空間提供的接口或者說是函數,系統調用接口,學習這些接口的功能以及相關的參數和返回值等。 嵌入式學習之Linux系統編程視頻教程在線觀看:https
2021-03-01 14:29:57
,VxWorks正是一個具有高性能的實時操作系統,成為嵌入式系統操作內核的最佳選擇之一。隨著嵌入式系統在網絡當中的應用不斷加強,具有多種數據通道的復合通信模式顯得列為必要。
2019-09-19 06:38:41
《C嵌入式編程設計模式》第一章 什么是嵌入式編程嵌入式系統的基本知識面向對象編程與結構化編程使用C語言實現類、繼承、狀態機 第二章 嵌入式實時過程Harmony的嵌入式編程嵌入式應用開發中的敏捷過程
2021-11-08 06:15:53
傳統電力系統的一次調頻及二次調頻的原理是什么?什么是改進型VSG二次調頻控制器?有何作用?改進型VSG二次調頻控制器有哪幾種控制方法啊?
2021-07-06 06:47:51
系統編程框架學習方法、內核向用戶空間提供的接口或者說是函數,系統調用接口,學習這些接口的功能以及相關的參數和返回值等。嵌入式學習之Linux系統編程視頻教程在線觀看
2021-12-23 07:30:31
在迅為論壇下載的資料:http://www.topeetboard.com從零開始學習嵌入式Linux系統編程,實驗手冊本身涵蓋所有知識點,包括大大小小 60 個左右的實驗 下載地址:http://pan.baidu.com/s/1o6Oq5hK
2015-11-16 17:26:38
不一樣的。不同于一般形式的軟件編程,基于特定的硬件平臺嵌入式系統編程的,勢必要求其編程語言具備較強的硬件直接操作能力。毫無疑問,匯編語言是具備這種特點的。然而,由于該語言編寫開發過程的復雜性,它通常不
2017-03-22 10:58:58
的開發板上的,CPU和我們電腦不一樣,所以編譯器也是不一樣的,生成的可執行程序也是不一樣的。不同于一般形式的軟件編程,基于特定的硬件平臺嵌入式系統編程的,勢必要求其編程語言具備較強的硬件直接操作能力
2017-03-07 21:15:35
編譯器也是不一樣的,生成的可執行程序也是不一樣的。不同于一般形式的軟件編程,基于特定的硬件平臺嵌入式系統編程的,勢必要求其編程語言具備較強的硬件直接操作能力。毫無疑問,匯編語言是具備這種特點的。然而
2017-05-05 15:11:30
程序也是不一樣的。不同于一般形式的軟件編程,基于特定的硬件平臺嵌入式系統編程的,勢必要求其編程語言具備較強的硬件直接操作能力。毫無疑問,匯編語言是具備這種特點的。然而,由于該語言編寫開發過程的復雜性,它
2015-10-17 13:23:00
程序也是不一樣的。不同于一般形式的軟件編程,基于特定的硬件平臺嵌入式系統編程的,勢必要求其編程語言具備較強的硬件直接操作能力。毫無疑問,匯編語言是具備這種特點的。然而,由于該語言編寫開發過程的復雜性,它
2015-10-22 19:24:31
什么是嵌入式系統高級編程語言?嵌入式系統高級語言編程特點有哪些?常用嵌入式系統高級編程語言基本性能有哪些?Java的特點是什么?它與嵌入式系統有什么關系?
2021-04-27 07:06:58
可以學習時間觸發嵌入式系統設計模式.pdf (26.23 MB )
2019-04-24 23:22:44
利用時間觸發式系統開發嵌入式產品
2012-08-09 00:27:06
的,CPU和電腦不一樣,所以編譯器也是不一樣的,生成的可執行程序也是不一樣的。不同于一般形式的軟件編程,基于特定的硬件平臺嵌入式系統編程的,勢必要求其編程語言具備較強的硬件直接操作能力。毫無疑問
2016-03-22 09:38:57
【STM32F407+matlab+STM32CubeMX】基于MBD的嵌入式系統實現基于STM32CubeMX和HAL的嵌入式系統編程通過圖形化配置和自動生成初始化C代碼的方式,大大降低了嵌入式
2021-08-17 07:08:10
本文列舉了多核嵌入式系統存在的一些主要局限,并對解決這些局限的可行方案進行了探討。將以一些嵌入式系統為例,指出利用現有架構改進系統節能效果的機遇。多核處理器與新興的嵌入式平臺的結合能夠滿足現代嵌入式
2021-03-09 06:36:52
《時間觸發嵌入式系統設計模式》《嵌入式系統軟件設計中的數據結構》周航慈《嵌入式系統軟件設計中的常用算法》周航慈《基于嵌入式實時操作系統的程序設計技術》周航慈《圈圈教你學USB》《unix/linux
2021-10-28 08:09:24
編寫等知識,嵌入式開發環境的搭建。 三:Linux系統編程 重點學習標準I/O庫,Linux多任務編
2021-12-27 07:21:52
不同于一般形式的軟件編程,嵌入式系統編程建立在特定的硬件平臺上,勢必要求其編程語 言具備較強的硬件直接操作能力。無疑,匯編語言具備這樣的特質。但是,歸因于匯編語言 開發過程的復雜性,它并不是嵌入式
2019-11-11 19:55:20
在后PC時代,越來越多的領域需要嵌入式系統的支持,傳統嵌入式系統的開發手段已不能滿足日益增長的復雜性和質量要求;而UML技術在軟件領域所取得的巨大成就為嵌入式系統開發帶來了希望。因此,如何把基于軟件領域的UML作為通用和完善的方法引入到嵌入式系統領域,將成為一個迫切需要考慮和解決的問題。
2019-11-04 08:17:47
程序也是不一樣的。不同于一般形式的軟件編程,基于特定的硬件平臺嵌入式系統編程的,勢必要求其編程語言具備較強的硬件直接操作能力。毫無疑問,匯編語言是具備這種特點的。然而,由于該語言編寫開發過程的復雜性,它
2017-06-13 10:11:45
怎樣去實現基于STM32CubeMX和HAL的嵌入式系統編程呢?其設計思路是怎樣的?
2021-11-19 06:11:56
為什么要設計一種可編程嵌入式系統?基于Java的可編程嵌入式系統是如何實現的?
2021-04-27 07:20:32
不一樣的,生成的可執行程序也是不一樣的。不同于一般形式的軟件編程,基于特定的硬件平臺嵌入式系統編程的,勢必要求其編程語言具備較強的硬件直接操作能力。毫無疑問,匯編語言是具備這種特點的。然而,由于該語言
2017-10-09 09:21:28
不一樣的,生成的可執行程序也是不一樣的。不同于一般形式的軟件編程,基于特定的硬件平臺嵌入式系統編程的,勢必要求其編程語言具備較強的硬件直接操作能力。毫無疑問,匯編語言是具備這種特點的。然而,由于該語言
2017-10-18 10:09:19
串聯改進型電容三點式振蕩器原理及電路
2019-09-27 08:49:57
UML引入到嵌入式系統中的可行性一種改進的通用嵌入式系統UML方案如何使用UML來設計嵌入式系統?
2021-04-23 06:12:34
應用開發和系統開發是嵌入式Linux中最重要的一部分,也是企業人才需求最廣的一部分。主要目標是精通嵌入式Linux下的程序設計,熟練掌握嵌入式Linux的開發環境、系統編程以及網絡編程,熟悉C++、QT
2020-08-30 11:28:25
、熟練掌握C語言編程;11、有移植嵌入式操作系統經驗者優先;12、熟悉Wince、Android、嵌入式Linux系統編程者優先。聯系人:欒新科電話:***郵箱:luan@forlinx.com網址:www.forlinx.com
2016-07-21 17:04:14
時間觸發嵌入式系統設計模式:使用8051微控制器開發可靠應用主要關注使用軟件模式迅速地開發時間觸發嵌入式系統的軟件,涉及的系統全部基于8051系列微控制器。時間觸發技術
2008-10-28 23:20:39 683
683 C語言嵌入式系統編程教程
不同于一般形式的軟件編程,嵌入式系統編程建立在特定的硬件平臺上,勢必要求其編程語言具備較強的硬件直接操作能力。無疑
2010-02-10 10:33:40200 cc++嵌入式系統編程
操作系統恐懼癥(osophobia)[名] 嵌入式系統開發人員普遍存在的恐懼癥嵌入式編程的大多數問題都可以因為操作系統的引人而獲益,這
2010-03-04 16:40:4063 通過volatile關鍵字的使用、嵌入式系統工程設置、嵌入式系統的數據結構設計、嵌入式系統算法設計四個方面的介紹,分析了嵌入式系統編程本身特有的屬性和方法.通過嵌入式系統和
2010-07-01 17:07:3626
報警鈴輸出改進型光觸發報警2電路圖
2009-06-10 09:10:191447 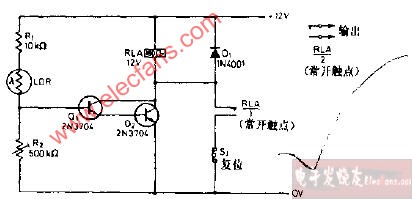
報警鈴輸出改進型光觸發報警電路圖
2009-06-10 09:10:481656 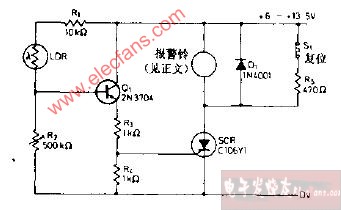
改進型微開關觸發防盜報警電路圖
2009-06-10 09:47:261501 
不同于一般形式的軟件編程,嵌入式系統編程建立在特定的硬件平臺上,勢必要求
其編程語言具備較強的硬件直接操作能力。無疑,匯編語言具備這樣的特質。但是,歸
因于匯編語言開發過程的復雜性,它并不是嵌入式系統開發的一般選擇。
2016-01-08 17:25:5317 C語言嵌入式系統編程教程
2017-01-16 13:54:5535 1.引言 近年來,嵌入式發展迅速,采用51單片機死循環的事件觸發編程方式已逐漸不能滿足企業對產品穩定性和安全性的要求。目前,嵌入式系統軟件有VxWork、Linux、WinCE、C/OS-II
2017-10-17 15:44:124 C嵌入式系統編程
2017-10-23 16:27:3514 C語言的嵌入式系統編程修煉之道
2017-10-24 08:36:2629 本文詳細介紹了時間觸發嵌入式系統設計模式之使用8051系列微控制器開發的可靠應用。
2017-11-24 15:43:1717 2 KB,由于RTOS對每個任務都要開辟單獨內存區域,存放任務的上下文和各任務獨立的堆棧,所以在這種系統中使用RTOS非常勉強。對于這些低成本資源受限系統通常采用前后臺(或者叫超級循環)結構進行編程,這實際上是一種事件觸發的編程模式,當中斷數目較多且系
2017-11-30 08:17:30146 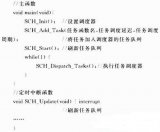
不同于一般形式的軟件編程,嵌入式系統編程建立在特定的硬件平臺上,勢必要求其編程語言具備較強的硬件直接操作能力。無疑,匯編語言具備這樣的特質。但是,歸因于匯編語言開發過程的復雜性,它并不是嵌入式系統開發的一般選擇。
2017-12-11 11:52:228403 嵌入式系統編程之內存操作學習 1.數據指針 在嵌入式系統的編程中,常常要求在特定的內存單元讀寫內容,匯編有對應的MOV指令,而除C/C++以外的其它編程語言基本沒有直接訪問絕對地址的能力。在嵌入式
2018-09-08 18:11:01245 近年來,嵌入式發展迅速,采用51單片機死循環的事件觸發編程方式已逐漸不能滿足企業對產品穩定性和安全性的要求。目前,嵌入式系統軟件有VxWork、Linux、WinCE、μC/OS-II等,可出于成本
2020-01-25 16:37:001741 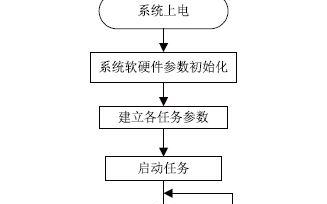
EE-125:ADSP-218x嵌入式系統軟件管理和在系統編程(ISP)
2021-05-18 16:37:0810 嵌入式系統系列叢書-時間觸發嵌入式系統設計模式
2021-12-13 11:30:270 電子發燒友網站提供《C語言嵌入式系統編程修煉之一:背景篇.rar》資料免費下載
2023-11-17 11:35:061
正在加载...
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論