 電子發燒友App
電子發燒友App


步進電機又稱為脈沖電機,基于最基本的電磁鐵原理,它是一種可以自由回轉的電磁鐵,其動作原理是依靠氣隙磁導的變化來產生電磁轉矩。其原始模型是起源于年至年間。年前后開始以控制為目的的嘗試,應用于氫弧燈的電極輸送機構中。這被認為是最初的步進電機。二十世紀初,在電話自動交換機中廣泛使用了步進電機。由于西方資本主義列強爭奪殖民地,步進電機在缺乏交流電源的船舶和飛機等獨立系統中得到了廣泛的使用。二十世紀五十年代后期晶體管的發明也逐漸應用在步進電機上,對于數字化的控制變得更為容易。到了八十年代后,由于廉價的微型計算機以多功能的姿態出現,步進電機的控制方式更加靈活多樣。
步進電機相對于其它控制用途電機的最大區別是,它接收數字控制信號電脈沖信號并轉化成與之相對應的角位移或直線位移,它本身就是一個完成數字模式轉化的執行元件。而且它可開環位置控制,輸入一個脈沖信號就得到一個規定的位置增量,這樣的所謂增量位置控制系統與傳統的直流控制系統相比,其成本明顯減低,幾乎不必進行系統調整。步進電機的角位移量與輸入的脈沖個數嚴格成正比,而且在時間上與脈沖同步。因而只要控制脈沖的數量、頻率和電機繞組的相序,即可獲得所需的轉角、速度和方向。
單片機控制步進電機的設計與步進電機失步原因
單片機控制步進電機的設計
步進電機是工業控制中應用十分廣泛的一種電動機,它能將數字信號直接轉換成角位移或線位移,驅動速度和指令脈沖能嚴格同步,具有較高的定位精度,控制系統成本低廉,在經濟型數控機床等領域應用廣泛。這里針對電磁干擾較強以及要求低成本應用的場合,采用超強抗干擾、小巧低功耗的工業級STC12C系列單片機,充分利用單片機內部的硬件資源,設計實用的步進電機控制和驅動系統。
1、控制系統總體方案設計
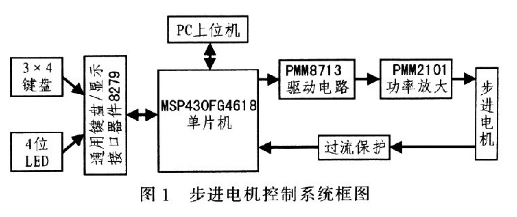
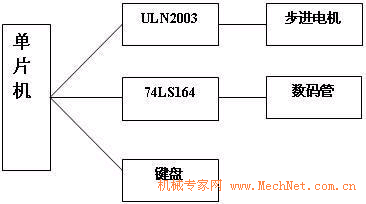
系統功能原理示意圖如圖1所示。
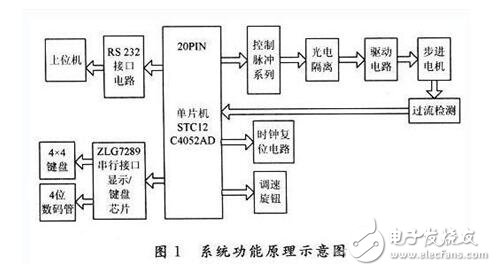
在該系統中由單片機直接輸出電機的各相控制脈沖序列,光耦進行必要的光電隔離,采用分立元件構成功率.MOSFET管驅動電路,帶動電機轉動。鍵盤接口與 LED顯示功能由具有SPI串行接口功能的ZLG7289實現。既可使用按鍵輸入的方式精確設置電機的工作方式與轉速,也可以通過調速旋鈕實現電機轉速的連續調節,還能通過上位機實現對電機工作方式的調整與控制。
2、硬件電路設計
2.1 控制電路設計
控制芯片采用STC12C4052AD,它是1個時鐘/機器周期的單片機,速度比普通的8051單片機快8~12倍,有20個引腳且為小巧封裝。該單片機具有超強抗干擾,抗靜電的特點,能輕松通過4 kV快速脈沖干擾,其功耗超低,正常工作模式下的典型功耗為2.7~7 mA。芯片自帶硬件看門狗,具有高速SPI通信端口,8通道8位A/D轉換,2路PWM輸出,4 KB容量的FLASH存儲器,256 B容量的SRAM,4個定時器,1個全雙工串行通信口。由于單片機內部的資源豐富,性價比高,能夠滿足該設計的要求,而且減少了硬件電路的設計,提高了工作效率。單片機的外部引腳定義,及其在該設計中的資源分布如圖2所示。
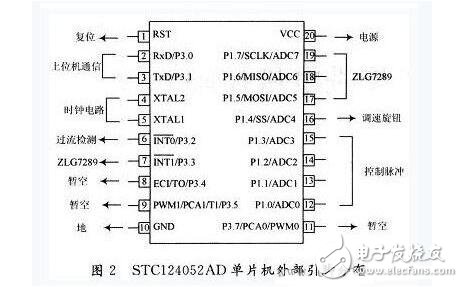
P1.4(ADC4)口外接4.7 kΩ的可調電位器,利用單片機內部的模/數轉換功能轉換成數字量,進而控制輸出脈沖頻率,完成步進電機速度的“連續”調節。過流檢測的結果直接引入到外部中斷0,實現對電流的快速控制。
2.2 驅動電路設計
功率MOSFET管的部分驅動電路如圖3所示。該電路的設計可改進功率MOSFET管的快速開通時間,提高了驅動電流的前后沿陡度,能夠改善高頻響應。功率MOSFET管柵源間的阻抗很高,工作于開關狀態下漏源間電壓的突變會通過極間電容耦合到柵極,產生相當幅度的VGS脈沖電壓。正方向的VGS脈沖電壓可能會導致器件的誤導通。為此,需要適當降低柵極驅動電路的阻抗,在柵源之間并接阻尼電阻或接一個穩壓值小于20 V,而又接近20 V的齊納二極管,以防止柵源開路工作。
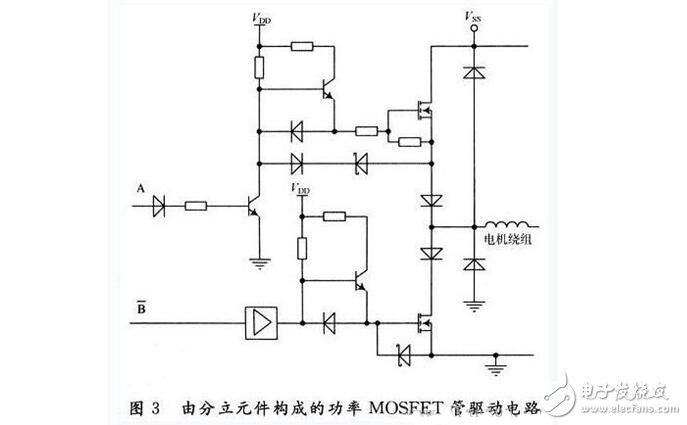
為了抑制功率管內的快恢復,二極管出現反向恢復效應,在電路中接入4只快恢復二極管。其中,反并聯快恢復二極管的作用是為電機相繞組提供續流通路,其余2 只是為了使功率MOSFET管內部的快恢復二極管不流過反向電流,以保證功率MOSFET管在動態工作時能起到正常的開關的作用。
2.3 顯示與按鍵處理電路
在單片機應用系統中,典型的鍵盤顯示接口電路由基于并行擴展技術的8155,8279構成控制電路。現代單片機應用系統廣泛采用串行擴展技術。相對于并行方式,串行擴展接線靈活,占用單片機資源少。
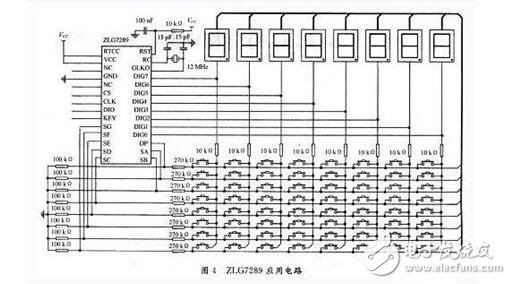
ZLG7289A是具有SPI串行接口功能的可同時驅動8位數碼管或64只獨立LED的智能顯示驅動芯片,單片即可完成顯示、鍵盤接口的全部功能。采用串行方式與微處理器通信,數據從DIO引腳送入芯片,并由CLK端同步。當選信號變為低電平后,DIO引腳上的數據在CLK引腳的上升沿被寫入 ZLG7289A的緩沖寄存器。圖4是ZLG7289的典型應用。ZLG7289A連接共陰式數碼管,應用中不需要的數碼管與鍵盤可以不連接,省去數碼管或對數碼管設置消隱屬性,這均不會影響鍵盤的使用。整個電路無需添加鎖存器和驅動器,耗電少,軟件設計中無需編寫顯示譯碼程序,省去了靜態顯示擴展芯片,大大節省了CPU的時間。該電路設計中僅采用4×4鍵盤和4位數碼管,已完全滿足設計需要。
3、軟件設計
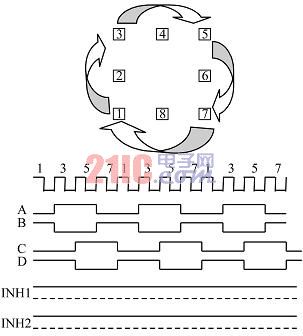
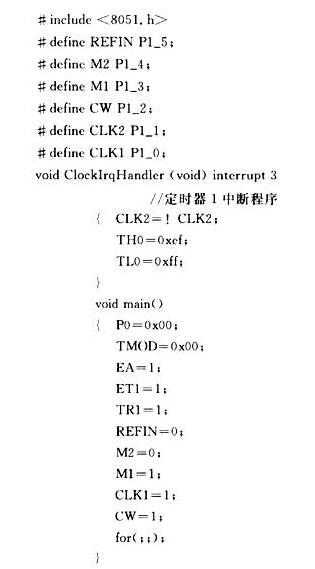
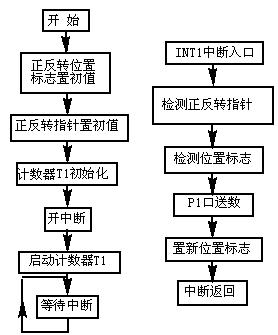
軟件部分采用模塊化結構設計。對步進電機轉速的控制是通過定時器工作在中斷方式實現的。定時器定時中斷產生周期性脈沖序列,不是采用軟件延時的方式,這樣不占用CPU的時間。CPU在非中斷時間內可以處理其他事件,只有在中斷發生時才驅動步進電機轉動一步。根據步進電機勵磁狀態轉換,采用查表法求出所需的輸出狀態,并以二進制碼的形式依次存入單片機內部的存儲器中;然后按照正向或反向順序依次取出地址的狀態字,送給STC12C4052AD,輸出各勵磁狀態,從而實現環形分配器的功能。
程序總體框架包括:主程序、過流檢測中斷服務子程序、定時器中斷服務子程序、以及其他子程序(包括正轉、反轉子程序、鍵盤顯示控制子程序、A/D轉換子程序等),由于篇幅限制,在此不一一敘述。
4、系統測試
該系統采用超強抗干擾,小巧低功耗的工業級STC12C4052AD單片機為控制核心,工作可靠性高,抗于擾能力強。系統測試在專門的檢測實驗室內進行。利用群脈沖發生器(EFT-4001)、周波電壓跌落發生器(VDG-1105)、靜電放電發生器(ESD-20)以及雷擊浪涌發生器(SG-5006) 等專用儀器對系統的電壓變化抗擾度、快速瞬變脈沖群抗擾度、抗靜電和雷擊浪涌等參數進行檢測。經過實驗,系統功能正常,所有參數均已達標。
電子技術發展日新月異,新型單片機層出不窮。在電機控制系統開發過程中,如果恰當選取單片機以及各電路模塊的型號,能夠簡化設計過程,起到事半功倍的效果。該系統采用STC12C4052AD單片機,其工作方式、轉動速率及轉矩數可以通過鍵盤輸入,也可通過普通旋鈕或上位機調節。鍵盤顯示模塊采用 ZLG7289實現。本系統具有通用性,適當改變輸出口各位控制端,便可控制不同相數的步進電機。
單片機控制步進電機的失步原因分析
單片機控制步進電機易出現失步、低頻振動及易受外界電磁干擾而影響步進電機的正常工作,從步進電機本身的特性和控制驅動系統等方面分析了問題出現的原因,從控制驅動系統電磁干擾方面來講步進電機運行時的不穩定主要受兩個方面的影響,一是步進電機本身的機械特性所致,另一方面是控制驅動系統本身受外界環境因素和程序結構等方面產生的影響。
步進電機運行時存在的低頻振動即轉子的振蕩現象,會引起齒輪碰撞,產生噪聲!這種噪聲是步進電機的固有特性造成的;同時步進電機還存在諧振點,當轉子轉速達到其機械諧振點時就會產生諧振和噪聲;另外步進電機在高頻啟動和停止時也會因為強烈的沖擊產生振動和噪聲。
電磁干擾將有可能使單片機控制系統工作發生紊亂,使單片機產生誤動作甚至死機等,嚴重影響步進電機運行的穩定性。單片機控制步進電機的驅動系統產生電磁干擾的干擾源主要來自外部電源、內部電源、印制板自制干擾、空中周圍電磁場干擾、外部干擾信號可以通過公共導線、電容、相鄰導線的互感以及空間輻射等途徑從干擾源耦合到敏感元件上。
驅動系統中影響比較突出的幾個方面加以分析:
1、布線不合理。同一回路或不同回路間布線不合理時容易產生感生電動勢,形成電磁干擾。
2、供電干擾。工作時,交流電網負載突變時產生幅值較大的瞬變電壓波經由直流穩壓電源進入電子控制回路,從而影響單片機供電電源的穩定。
3、單片機與步進電機驅動回路之間,驅動回路產生的干擾信號通過線路竄入單片機,使單片機產生誤動作,從而導致步進電機出現多步或失步現象。
4、步進電機的電樞繞組通斷頻繁,當通電時,會產生較大的電壓電流的梯度變化,導致磁場耦合,形成嚴重的電磁干擾。當電樞繞組斷電時,線圈中的磁場突然消失會產生很高的瞬變電壓竄入控制回路,對系統中其它電子裝置產生相當大的電能沖擊甚至損壞元件。
51單片機驅動步進電機的方法
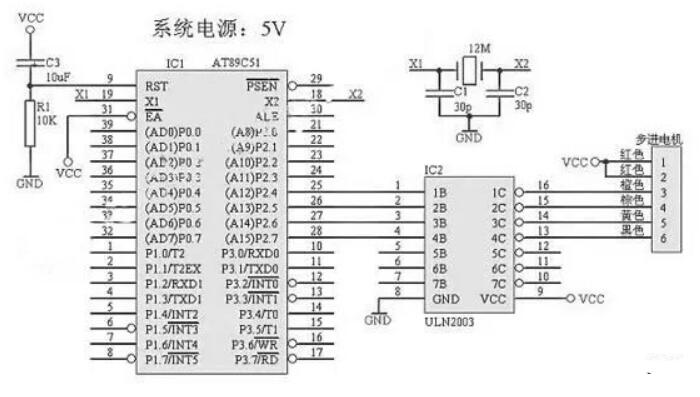
驅動電壓12V,步進角為 7.5度 。 一圈 360 度 , 需要 48 個脈沖完成!
該步進電機有6根引線,排列次序如下:1:紅色、2:紅色、3:橙色、4:棕色、5:黃色、6:黑色。采用51驅動ULN2003的方法進行驅動。
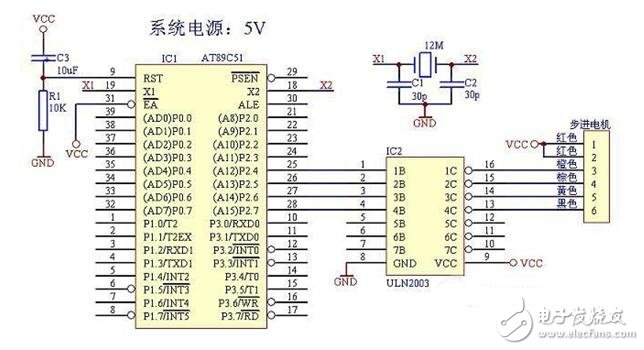
ULN2003的驅動直接用單片機系統的5V電壓,可能力矩不是很大,大家可自行加大驅動電壓到12V。
步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元件。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,即給電機加一個脈沖信號,電機則轉過一個步距角。這一線性關系的存在,加上步進電機只有周期性的誤差而無累積誤差等特點。使得在速度、位置等控制領域用步進電機來控制變的非常的簡單。 雖然步進電機已被廣泛地應用,但步進電機并不能象普通的直流電機,交流電機在常規下使用。它必須由雙環形脈沖信號、功率驅動電路等組成控制系統方可使用。因此用好步進電機卻非易事,它涉及到機械、電機、電子及計算機等許多專業知識。 目前,生產步進電機的廠家的確不少,但具有專業技術人員,能夠自行開發,研制的廠家卻非常少,大部分的廠家只一、二十人,連最基本的設備都沒有。僅僅處于一種盲目的仿制階段。這就給戶在產品選型、使用中造成許多麻煩。










 工商網監
工商網監
評論