 電子發燒友App
電子發燒友App


PID算法是一種十分經典的控制器算法,在絕大多數自動控制系統中都會用到,其數學表達式:

使用運算放大器可以搭建出很多有意思的電路,今天這里介紹我們在自動控制系統中的PID運算電路,在此之前,先介紹幾個使用運放搭建的基礎電路:
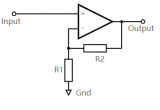
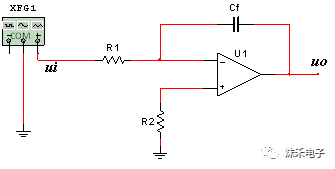
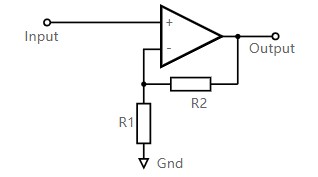
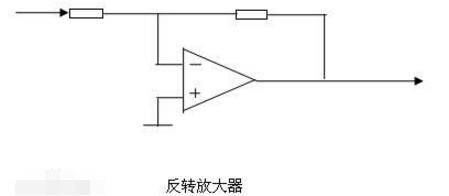
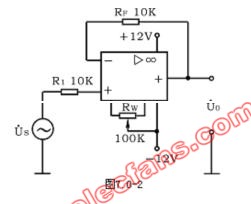
1、比例運算
如圖1所示,該電路是反相比例運算放大電路,其公式為:
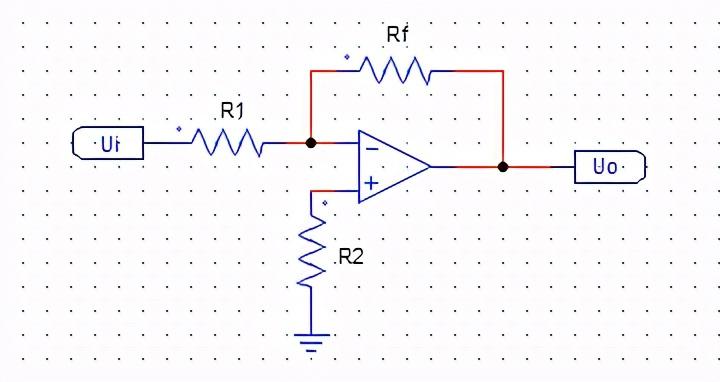
圖1
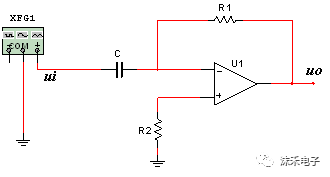
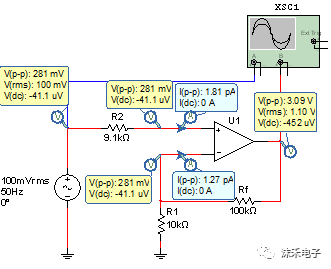
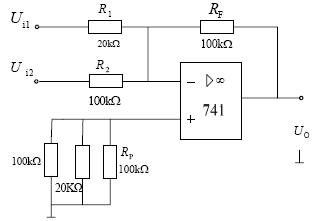
2、積分運算
如圖2所示,該電路是積分運算電路,其公式為:
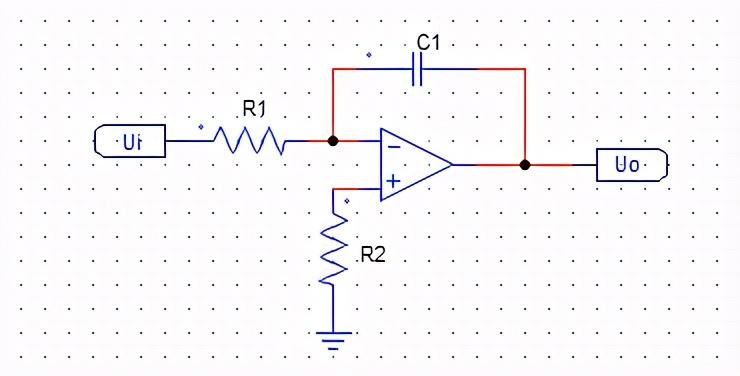
圖2
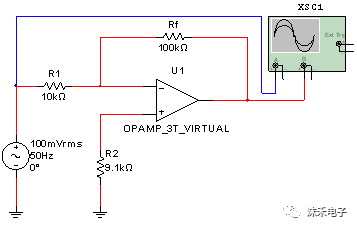
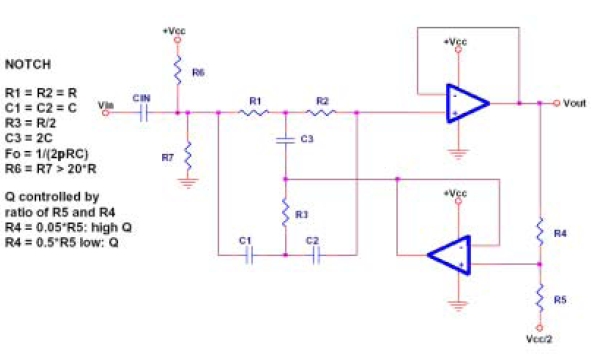
3、微分運算
微分運算與積分運算互為逆運算。如圖3所示,該電路是微分運算電路,其公式為:

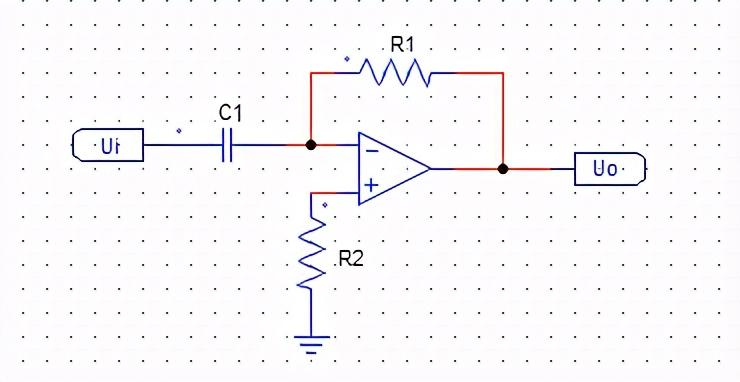
圖3
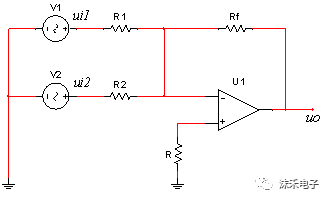
4、PID運算
重寫PID數學表達式:

從該式可知,PID由比例、積分和微分三種運算之和。據此,可以將上面提到的三種電路整合在一塊就可得到PID調節器,如圖4所示,從中可推出公式:

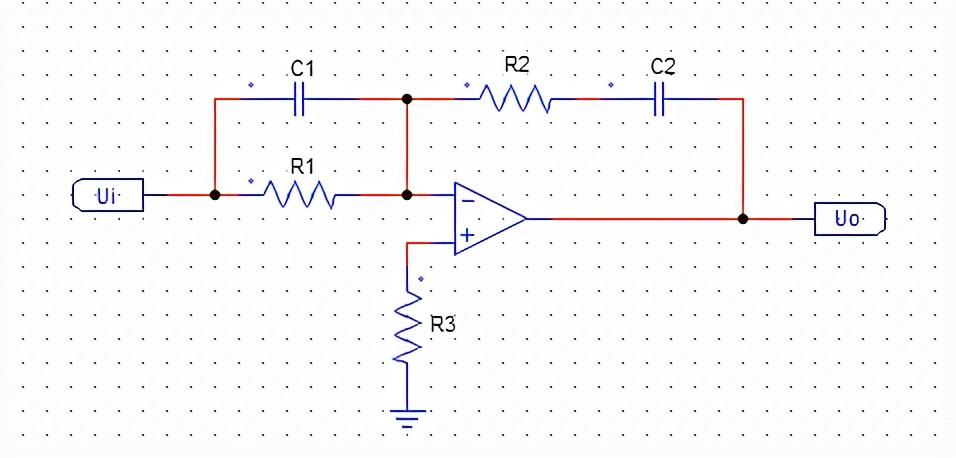
圖4
這個PID調節器電路在模擬電源的環路中經常用到,其實在實際項目中,更常用到的是PI調節器,這時只需要將C1移除即可。如果要想使用PD調節器,只需將R1移除。












 工商網監
工商網監
評論