
全面總結(jié)動(dòng)態(tài)NeRF
1. 摘要 神經(jīng)輻射場(chǎng)(NeRF)是一種新穎的隱式方法,可以實(shí)現(xiàn)高分辨率的三維重建和表示。在首次提出....

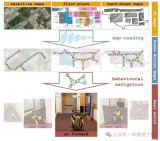
機(jī)器人沒(méi)有度量信息如何導(dǎo)航
機(jī)器人能否像人類(lèi)一樣利用有限的度量和空間信息進(jìn)行導(dǎo)航呢?目前,大多數(shù)機(jī)器人的導(dǎo)航系統(tǒng)依賴(lài)于詳細(xì)的幾何....
最新圖優(yōu)化框架,全面提升SLAM定位精度
同時(shí)定位與地圖構(gòu)建(SLAM)是一項(xiàng)關(guān)鍵技術(shù),允許移動(dòng)機(jī)器人在部分或完全未知的環(huán)境中自主導(dǎo)航。它包括....

如何設(shè)定機(jī)器人語(yǔ)義地圖的細(xì)粒度級(jí)別
0. 這篇文章干了啥? 機(jī)器人學(xué)中的一個(gè)基本問(wèn)題是創(chuàng)建機(jī)器人觀察到的場(chǎng)景的有用地圖表示,其中有用性由....

MG-SLAM:融合結(jié)構(gòu)化線特征優(yōu)化高斯SLAM算法
同步定位與地圖構(gòu)建 (SLAM) 是計(jì)算機(jī)視覺(jué)中的一個(gè)基本問(wèn)題,旨在在同時(shí)跟蹤相機(jī)姿勢(shì)的同時(shí)對(duì)環(huán)境進(jìn)....

為何無(wú)人機(jī)領(lǐng)域廣泛采用PX4作為核心控制平臺(tái)
在眾多無(wú)人機(jī)類(lèi)型中,四旋翼因其具備垂直起降、穩(wěn)定性強(qiáng)、結(jié)構(gòu)相對(duì)簡(jiǎn)單等特點(diǎn)而得到廣泛應(yīng)用。目前,無(wú)論是....

一種提升無(wú)人機(jī)小物體跟蹤精度的方法
這篇文章提出了一種新穎的目標(biāo)跟蹤方法SFTrack,針對(duì)無(wú)人機(jī)(UAV)視頻中的獨(dú)特挑戰(zhàn),采用了三種....

基于旋轉(zhuǎn)平移解耦框架的視覺(jué)慣性初始化方法
精確和魯棒的初始化對(duì)于視覺(jué)慣性里程計(jì)(VIO)至關(guān)重要,因?yàn)椴涣嫉某跏蓟瘯?huì)嚴(yán)重降低姿態(tài)精度。

基于深度學(xué)習(xí)的三維點(diǎn)云分類(lèi)方法
近年來(lái),點(diǎn)云表示已成為計(jì)算機(jī)視覺(jué)領(lǐng)域的研究熱點(diǎn)之一,并廣泛應(yīng)用于自動(dòng)駕駛、虛擬現(xiàn)實(shí)、機(jī)器人等許多領(lǐng)域....

一種全新開(kāi)源SfM框架MASt3R
運(yùn)動(dòng)恢復(fù)結(jié)構(gòu)(SfM)是計(jì)算機(jī)視覺(jué)領(lǐng)域一個(gè)長(zhǎng)期存在的問(wèn)題,旨在根據(jù)每個(gè)相機(jī)拍攝的圖像來(lái)估計(jì)場(chǎng)景的3D....


使用STT全面提升自動(dòng)駕駛中的多目標(biāo)跟蹤
3D多目標(biāo)跟蹤(3D MOT)在各種機(jī)器人應(yīng)用中發(fā)揮著關(guān)鍵作用,例如自動(dòng)駕駛車(chē)輛。為了在駕駛時(shí)避免碰....

一種將NeRFs應(yīng)用于視覺(jué)定位任務(wù)的新方法
視覺(jué)定位旨在估計(jì)在已知環(huán)境中捕獲的給定圖像的旋轉(zhuǎn)和位置,大致可以分為絕對(duì)姿態(tài)回歸(APR),場(chǎng)景坐標(biāo)....

使用語(yǔ)義線索增強(qiáng)局部特征匹配
視覺(jué)匹配是關(guān)鍵計(jì)算機(jī)視覺(jué)任務(wù)中的關(guān)鍵步驟,包括攝像機(jī)定位、圖像配準(zhǔn)和運(yùn)動(dòng)結(jié)構(gòu)。目前最有效的匹配關(guān)鍵點(diǎn)....

擴(kuò)散模型的理論基礎(chǔ)
擴(kuò)散模型的迅速崛起是過(guò)去幾年機(jī)器學(xué)習(xí)領(lǐng)域最大的發(fā)展之一。在這本簡(jiǎn)單易懂的指南中,學(xué)習(xí)你需要知道的關(guān)于....

常用的RGB-D SLAM解決方案
BundleFusion是一種稠密的實(shí)時(shí)室內(nèi)場(chǎng)景三維重建算法框架。輸入為RGB-D相機(jī)采集的并且是對(duì)....

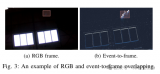
小于50ms!IEEE'24最新,高效低延遲UVA檢測(cè)系統(tǒng)!
這篇文章的基本原理是利用事件驅(qū)動(dòng)的視覺(jué)傳感器(DVS)和傳統(tǒng)的RGB攝像頭相結(jié)合,實(shí)現(xiàn)在邊緣設(shè)備上實(shí)....
CVPR'24 Highlight!跟蹤3D空間中的一切!
為了使用三維運(yùn)動(dòng)先驗(yàn)正則化估計(jì)的三維軌跡,模型另外預(yù)測(cè)了每條軌跡的剛性嵌入,這使能夠軟地分組表現(xiàn)出相....

什么是SLAM?基于3D高斯輻射場(chǎng)的SLAM優(yōu)勢(shì)分析
基于NeRF的SLAM算法采用全局地圖和圖像重建損失函數(shù),通過(guò)可微分渲染捕獲稠密的光度信息,具有高保....
百度開(kāi)源DETRs在實(shí)時(shí)目標(biāo)檢測(cè)中勝過(guò)YOLOs
這篇論文介紹了一種名為RT-DETR的實(shí)時(shí)檢測(cè)Transformer,是第一個(gè)實(shí)時(shí)端到端目標(biāo)檢測(cè)器。


基于深度學(xué)習(xí)的方法在處理3D點(diǎn)云進(jìn)行缺陷分類(lèi)應(yīng)用
背景部分介紹了3D點(diǎn)云應(yīng)用領(lǐng)域中公開(kāi)可訪問(wèn)的數(shù)據(jù)集的重要性,這些數(shù)據(jù)集對(duì)于分析和比較各種模型至關(guān)重要....


助力移動(dòng)機(jī)器人下游任務(wù)!Mobile-Seed用于聯(lián)合語(yǔ)義分割和邊界檢測(cè)
精確、快速地劃定清晰的邊界和魯棒的語(yǔ)義對(duì)于許多下游機(jī)器人任務(wù)至關(guān)重要,例如機(jī)器人抓取和操作、實(shí)時(shí)語(yǔ)義....


探索ICLR‘24 Spotlight中的首個(gè)十億級(jí)別3D通用大模型
Uni3D在少樣本點(diǎn)云部件分割任務(wù)上也展示出了卓越的性能。下表結(jié)果顯示,在各種實(shí)驗(yàn)條件下,Uni3D....

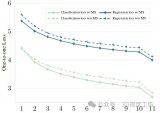
MS-DETR和其他SOTA方法的對(duì)比
混合監(jiān)督會(huì)產(chǎn)生比基線更低的一對(duì)一損失。x軸對(duì)應(yīng)epoch,y軸對(duì)應(yīng)一對(duì)一監(jiān)督的訓(xùn)練損失。虛線和實(shí)線分....
15倍加速!SuperCluster:最強(qiáng)3D點(diǎn)云全景分割!
S3DIS Area 5的大規(guī)模全景分割結(jié)果,共有9.2 M個(gè)點(diǎn)( 78M預(yù)采樣)和1863個(gè)真實(shí)"....

自動(dòng)駕駛領(lǐng)域的數(shù)據(jù)集匯總
發(fā)自動(dòng)駕駛論文哪少的了數(shù)據(jù)集,今天筆者將為大家推薦一篇最新的綜述,總結(jié)了200多個(gè)自動(dòng)駕駛領(lǐng)域的數(shù)據(jù)....






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
