 車路協同應用場景分析
車路協同應用場景分析
本文試圖厘清車聯網、無人車、網聯車、車路協同等概念,同時重點討論了車路協同的主要應用場景。希望有所幫助。
隨著新一代信息技術與汽車產業的深度融合,智能網聯汽車正逐漸成為全球汽車產業發展的戰略制高點。我國高度重視智能網聯汽車發展,智能網聯汽車成為關聯眾多重點領域協同創新、構建新型交通運輸體系的重要載體,并在塑造產業生態、推動國家創新、提高交通安全、實現節能減排等方面具有重大戰略意義,已經上升到國家戰略高度。
伴隨我國智能網聯汽車發展的是一系列全新的概念,車聯網、智能汽車、無人駕駛汽車、自動駕駛汽車、車路協同等等,讓人們目不暇接。本文試圖對這些概念進行一下梳理,同時提出車路協同應用的主要場景。
一、幾個定義
(1)車聯網(IOV,Internet of Vehicles)
車聯網是以車內網、車際網和車載移動互聯網為基礎,按照約定的通信協議和數據交互標準,在車-車、車輛與互聯網之間,進行無線通訊和信息交換,以實現智能交通管理控制、車輛智能化控制和智能動態信息服務的一體化網絡,它是物聯網技術在智能交通系統領域的延伸。
早期的車聯網叫做Telematics。Telematics是遠距離通信的電信(Telecommunications)與信息科學(Informatics)的合成詞,按字面可定義為通過內置在汽車、航空、船舶、火車等運輸工具上的計算機系統、無線通信技術、衛星導航裝置、交換文字、語音等信息的互聯網技術而提供信息的服務系統。簡單的說就通過無線網絡將車輛接入互聯網,為車主提供駕駛、生活所必需的各種信息。
(2)智能汽車(Intelligent Vehicles)
就是在普通車輛的基礎上增加了先進的傳感器(雷達、攝像)、控制器、執行器等裝置,通過車載傳感系統和信息終端實現與人、車、路等的智能信息交換,使車輛具備智能的環境感知能力,能夠自動分析車輛行駛的安全及危險狀態,并使車輛按照人的意愿到達目的地,最終實現替代人來操作的目的。
美國汽車工程師協會(SAE)根據系統對于車輛操控任務的把控程度,將自動駕駛技術分為L0-L5,系統在L1~L3級主要起輔助功能;當到達L4級,車輛駕駛將全部交給系統,而L4、L5的區別在于特定場景和全場景應用。
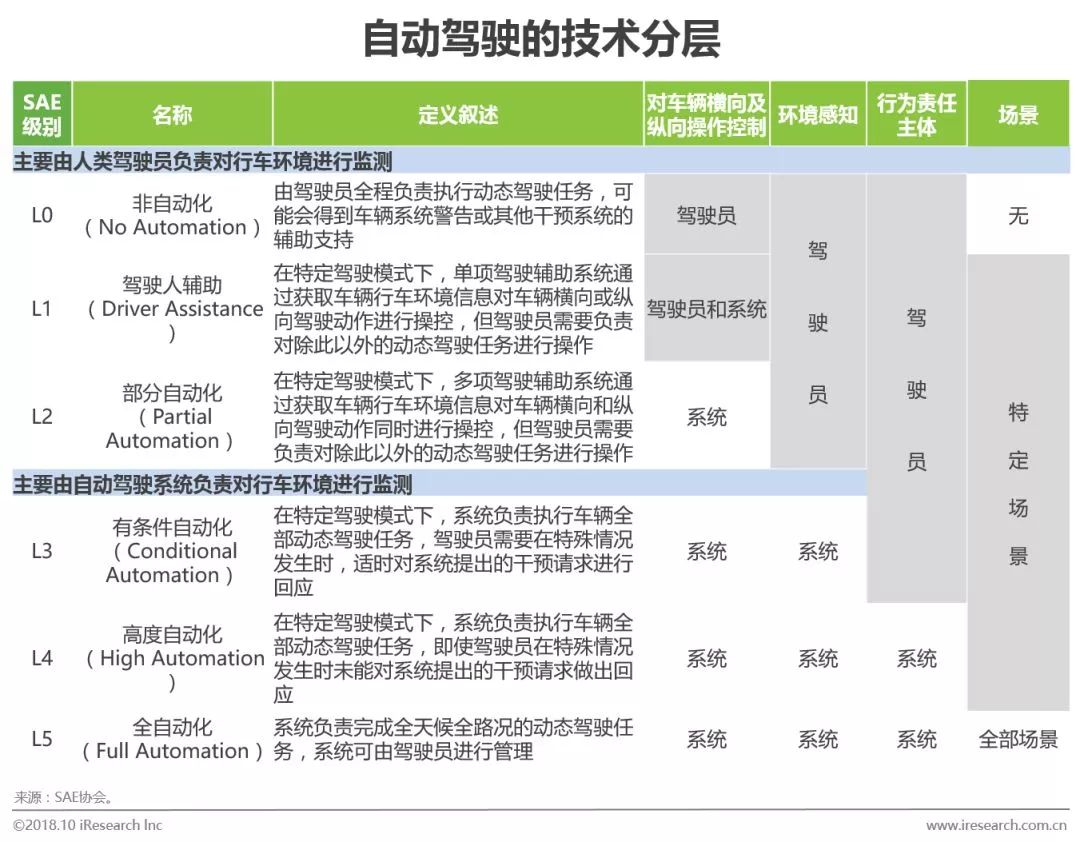
圖 1 自動駕駛技術分級
自動駕駛汽車(Autonomousvehicles;Self-pilotingautomobile)又稱無人駕駛汽車(無人車)、電腦駕駛汽車、或輪式移動機器人,是一種通過電腦系統自動規劃行車路線并控制車輛到達預定目標的智能汽車。
(3)智能網聯車(ICV,Intelligent Connected Vehicle)
智能網聯汽車是指車聯網與智能車的有機聯合,是搭載先進的車載傳感器、控制器、執行器等裝置,并融合現代通信與網絡技術,實現車與X(人、車、路、云端等)智能信息交換、共享,具備復雜環境感知、智能決策、協同控制等功能,可實現“安全、高效、舒適、節能”行駛,并最終可實現替代人來操作的新一代汽車。
(4)車路協同系統(CVIS,Cooperative Vehicle Infrastructure System)
車路協同系統是基于無線通信、傳感探測等技術獲取車輛和道路信息,通過車車、車路通訊實現信息交互和共享,從而實現車輛和路側設施之間智能協同與協調,實現優化使用道路資源、提高交通安全、緩解擁堵的目標。車路協同是ITS的重要子系統,也是歐美日等交通發達國家的研究熱點。
(5)車路協同通信(V2X,Vehicle to Everything)
作為物聯網面向應用的一個概念延伸,V2X車聯網是對D2D(DevicetoDevice)技術的深入研究過程。它指的是車輛之間,或者汽車與行人、騎行者以及基礎設施之間的通信系統。
V2X車聯網通信主要分為三大類:V2V、V2I和V2P。運輸實體,如車輛、路側基礎設施和行人,可以收集處理當地環境的信息(如從其它車輛或傳感器設備接收到的信息),以提供更多的智能服務,如碰撞警告或自主駕駛。
車路協同需要有高速、穩定、低時延的通信技術作為保障,而基于當前成熟的LTE技術的LTE-V2X能夠讓路側單元(RSU)與車載單元(OBU)的信息進行有效交互。同時,這項技術也在演進之中,在5G時代,更是能夠憑借5G技術的優秀通信能力讓自動駕駛成為可能,讓人們獲得更優良、安全、高效的出行體驗。
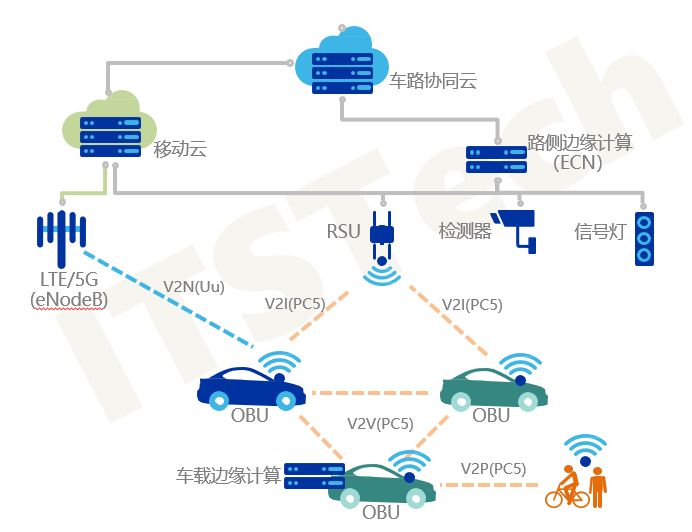
圖 2 車路協同服務
路側單元(RSU,Road Side Unit)
車路協同路側單元是車路協同系統的重要組成部分,也是突破車路協同技術的關鍵所在,其主要功能是采集當前的道路狀況、交通狀況等信息,通過通訊網絡,將信息傳遞至指揮中心或路側處理單元進行處理,并裁定相關信息通過網絡傳遞到有相應信息請求的車載終端,輔助駕駛員進行駕駛。
車載單元(OBU,On Board Unit)
車載單元是指安裝在車輛終端的起拓寬駕駛員視野、增加駕駛員對行車環境和車輛運行狀態的感知、加強行車安全的單元。主要技術包括信息獲取、信息交互、事故隱患提示等。從各類傳感器和車載網絡獲取原始信息,并解算出典型車路協同應用需要的底層信息,通過信息交互傳遞至路側單元。其功能包括車輛運動狀態獲取、行車環境信息感知、車輛定位信息獲取、信息交互、信息處理及管理、安全報警與預警等。
二、幾點理解
(1)車聯網=車路協同?
當車聯網的概念由早期的Telematics概念演進成IOV后,車聯網就是車路協同。車聯網和車路協同都是強調汽車通過通信接收道路環境信息,提高駕駛安全性和效率,所不同的是車聯網從車的角度、車路協同是以道路的角度分別闡述車的通信網絡。實際上在我國,車聯網是工信部主推的方案,而車路協同是交通運輸部主推的方案。但殊路同歸,最終都是借助無線V2X通信,實現駕駛的安全和高效。本文的車路協同涵蓋車聯網和車路協同的內容。
(2)智能網聯車的智能程度可以有所不同
目前智能汽車能夠達到的最好水平是L4,即在特定的場景下可以實現完全自動駕駛。雖然這與L5的全天候、全場景自動駕駛水平似乎只有一步之遙,但這一步卻是量變到質變的一步,短時間內不可能達到。
在很長一段時間,智能汽車的自主自動化駕駛水平都會在L4以下徘徊。發展車路協同技術是另辟蹊徑,智能汽車借助車路協同網聯技術,可以突破環境感知、邊緣計算等方面的瓶頸,提高車輛的感知范圍和駕駛智能。
在車路協同的環境下,智能網聯車可以在不同的自動化水平上發展,而且這正是車路協同和智能汽車發展最現實的道路。先期建設車路協同的框架和服務系統,為配置車載終端OBU的車輛提供駕駛信息、遠程遙控駕駛等服務。待到車路協同技術發展到一定階段,智能汽車將本身自主駕駛和車路協同輔助駕駛統一協同后,才有望最終達成的L5級全自動化駕駛。
(3)車路協同項目應該在特定的場景下開展
車路協同項目需要投入一定費用進行基礎設施建設,包括建設路側單元RSU,當然作為5G最主要的應用,RSU可以隨著我國城市大規模進行5G試驗網絡建設一同建設,但畢竟前期建設的回報是有限的。因此項目建設需要找到特定的應用場景,如公共交通、貨運車、特種車輛(救護車、消防車、公務車等)等的車路協同。待取得安全和效益上的明顯效果后,私家車和汽車廠商就會自動跟進。
三、車路協同的主要功能
根據中國汽車工程學會標準《合作式智能運輸系統車用通信系統應用層及應用數據交互標準》(T/CSAE53-2017),車聯網基礎功能涵蓋安全、效率和信息服務三大類17個應用。
表 1 一期應用列表
| 序號 | 類別 | 通信方式 | 應用名稱 |
| 1 | 安全 | V2V | 前向碰撞預警 |
| 2 | V2VN2I | 交叉路口碰撞預警 | |
| 3 | V2VN2I | 左轉輔助 | |
| 4 | V2V | 盲區預警/變道輔助 | |
| 5 | V2V | 逆向超車預警 | |
| 6 | V2V-Event | 緊急制動預警 | |
| 7 | V2V-Event | 異常車輛提醒 | |
| 8 | V2V-Event | 車輛失控預警 | |
| 9 | V2I | 道路危險狀況提示 | |
| 10 | V2I | 限速預警 | |
| 11 | V2I | 閣紅燈預警 | |
| 12 | V2P/V2I | 弱勢交通參與者碰撞預警 | |
| 13 | 效率 | V2I | 綠波車速引導 |
| 14 | V2I | 車內標牌 | |
| 15 | V2I | 前方擁堵提醒 | |
| 16 | V2V | 緊急車輛提醒 | |
| 17 | 信息服務 | V2I | 汽車近場支付 |
此外,根據同一份文件所作的應用評選,可以看出許多其他應用也得到較高的分數,是今后應該重點關注的應用內容。

圖 3 一期應用征集和投票結果

圖 4一期應用征集和投票結果(續)
四、應用場景
1、車路協同測試示范區
我國積極推進智能網聯汽車測試示范區建設工作,初步形成了“5+2”的建設格局。各地區結合智能網聯汽車發展狀況,依托地區優勢、特色資源,積極探索和建設示范區。北京-河北、上海、重慶、浙江、長春、武漢、無錫等地已建設智能網聯汽車測試示范區,積極推動半封閉、開放道路的測試驗證。
表 2 中國智能網聯汽車示范區概況
| 名稱 | 場景功能 | 特色分析 | 參與機構 | |
| 國家智能汽車與智慧交通(京冀)示范區 | 分為高速公路試驗區、城市交通試驗區及鄉村交通試驗區 | 封閉測試(高速+城市交通+鄉村交通)與實際道路測試結合,京冀地區聯動 | 千方科技、亦莊國投、百度、北汽、大唐、中興、長城汽車等15家 | |
| 國家智能網聯汽車(上海)A NICECITY示范區 | 設有模擬隧道、林蔭道、加油站、室內停車場等場景 | GPS/北斗;DSRC、LTE-V、城市化道路網、新產業協同發展 | 上海國際汽車城、上汽集團、同濟大學等 | |
| 浙江示范區 | 杭州云棲小鎮 | 設有小微站、宏站、車聯網指揮中心等 | LTE-V、5G車聯網指揮中心、互聯網汽車 | 浙江移動、華為、上汽、西湖電子等 |
| 桐鄉烏鎮 | 智能停車、緊急避讓等多種場景 | 智能停車功能測試 | 中電海康、諾基亞、上海貝爾等 | |
| 重慶i-VISTA智能汽車集成系統試驗區 | 設有直道、彎道、隧道、橋梁、淋雨道、林蔭道、ABS低附路等 | GPS/GLONASS/北斗、4G/5G通信網絡、DSRC/LTE-V、中國西部地形特征和氣候環境 | 中國汽研、長安、一汽、易華錄等 | |
| 武漢“智慧小鎮”示范區 | 封閉測試區+智慧小鎮進行新能源+智能網聯轎車/客車/專用車自動駕駛測試 | DSRC/LTE-V、通信網+物聯網+智慧網三網、無人駕駛示范小鎮 | 武漢·中國光谷汽車電子產業技術創新戰略聯盟(CECOV)牽頭 | |
| 長春智能網聯示范測試基地 | 智能駕駛、智慧交通技術,擁有冰雪天氣條件 | 專注LTE-V/5G高速試驗網絡功能測試 | 車載信息服務產業應用聯盟(TIAA)理事單位一汽、啟明信息主導推動 | |
| 國家智能交通綜合測試基地(無錫) | 智能交通管理技術綜合測試平臺、交通警察實訓平臺、智能網聯汽車運行安全測試平臺 | 構建實際道路測試場景和管理平臺推動解決智慧交通、車聯網等交通問題 | 公安部交通管理科學研究所(無錫所) | |
無錫車聯網(LTE-V2X)城市級應用示范項目基于工業和信息化部、公安部和江蘇省在無錫共同建設的國家智能交通綜合測試基地開展,由公安部交通管理科學研究所、無錫市公安局交通警察支隊、中國信息通信研究院、無錫市組織中國移動、華為、江蘇天安智聯等6家核心單位實施,一汽、奧迪、上汽、福特等車企以及中國交通頻道、高德、江蘇航天大為等23家單位共同參與標準制定、研發推進、開放道路實測、演示的系列活動。
截止目前,無錫已建設完成了現階段全球最大規模的城市級車聯網LTE-V2X網絡,覆蓋無錫市主城區、新城主要道路240個信號燈控路口,共170平方公里的規模。項目以“人-車-路-云”系統協同為基礎,開放40余項交通管控信息,實現V2I/V2V/V2P信息服務,覆蓋車速引導、救護車優先通行提醒、道路事件情況提醒、潮汐車道、電單車出沒預警等27個典型應用場景,未來,LTE-V2X技術將能支持實現高級自動駕駛、人車路協同感知和控制,讓道路更智慧,讓開車更簡單。
圖 5 無錫車聯網(LTE-V2X)城市級應用示范項目范圍
在智能網聯汽車測試示范區建設路側單元,形成無線覆蓋的測試示范區,可推薦測試內測試無人駕駛車輛安裝車載單元,形成車聯網。可全方位掌握測試車輛位置、速度、駕駛操作信息,可與無人駕駛車輛傳感器信息互相印證,提高無人駕駛汽車的安全性。
2、車路協同交通走廊
北汽集團2018年發布智能網聯汽車五年行動計劃“海豚+”戰略。北汽集團將與博世、松下、百度、科大訊飛、京東方等企業合作,整合優質資源。智能交通方面,結合2022年北京冬奧會、京雄高速、雄安新區和北京智慧城市需求,開展自動駕駛和車路協同良好的示范應用;面向冬奧會示范運營或量產應用商用車隊列自動駕駛技術,建設北汽車輛隊列自動駕駛技術平臺;加快建設順義智能網聯汽車試驗場等項目。
北京智能網聯汽車產業白皮書(2018年)提出業提出了加快建設智能路網設施的行動計劃。加快開展智能路網改造。提出“部署智能路網試點改造工程,規劃建設衛星地面增強站、LTE-V、5G-V2X路側單元,實現交通道路通信設施、視頻監控設施、交通信號、交通標識標線智能互聯,具備路網全域感知能力,滿足復雜的車路協同需要。”
在特定的高速公路或高等級公路路側設置路側單元,與使用道路的網聯汽車一起形成車聯網。為網聯汽車提供駕駛輔助和實時交通信息。國內目前有多家業內企業已經發布了車路協同高速公路應用。
圖 6 萬集山東高速公路測試基地項目
3、車路協同交叉口應用
交叉口控制的本質是依據實時交通狀況對交叉口中沖突點的通行時空資源進行合理分配,最終實現減少車輛在交叉口的等待時間,提高交叉口的通行效率的目的。
在路口布設路側單元,路側單元接收附近智能聯網汽車的信息和從云端收數據中心的數據,并不斷向附近的所有聯網車輛廣播有關其間發生的事情的信息,從而提前警告他們潛在的安全問題并同時在駕駛員本身對道路觀察的基礎上提供進一步的信息。
智能聯網汽車接收到路側單元發出的信息后對駕駛進行調整,同時將自己的數據發送給路側單元。
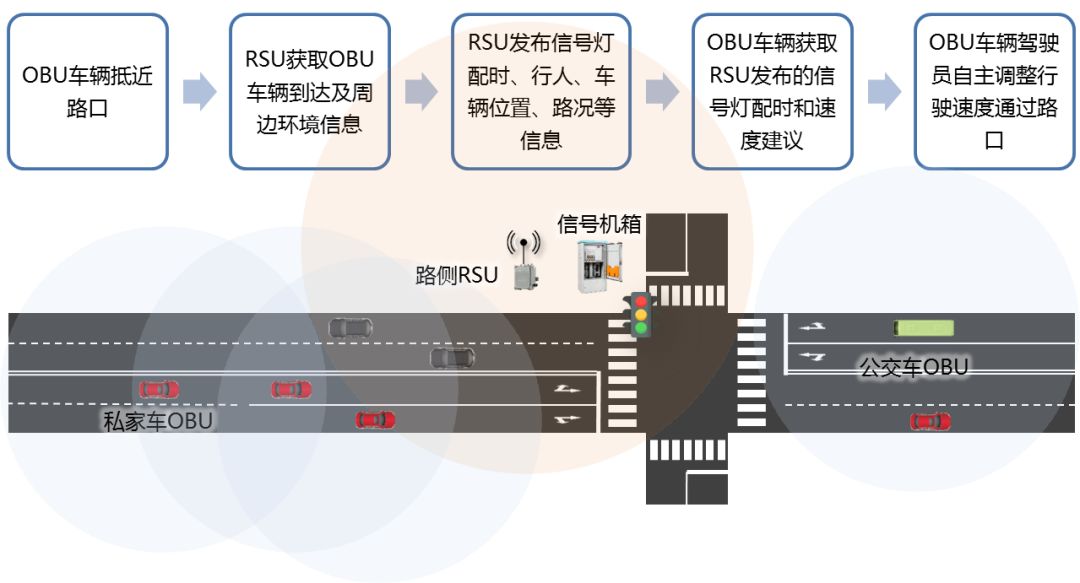
圖 7 車輛通過交叉口車路協同示意圖
路側單元與車載單元建立連接后,車載單元向路側單元發送包括車輛速度、車輛位置的車輛狀態消息。路側單元收到車輛狀態消息后進行解析處理,實現對車輛運行參數的實時監測,然后根據監測數據判定交叉口當前安全等級,并將判定結果與當前交叉口動態信息(當前信號燈狀態、信號保持時間等)打包為交叉口狀態消息或預警消息后實時向處于其通信隊列的車載單元發送,其中預警消息定向發布至潛在事故車輛,提醒其調整駕駛行為,避免事故發生;狀態消息以廣播方式發布,接收到消息的非事故車輛根據狀態消息調整駕駛行為。
4、智慧公交應用
利用車路協同技術提升智能公交管理水平,沿公交專用道部署路側單元RSU,可以實現公交專用道沿線的網絡覆蓋,形成智能公交車聯網。公交車輛安裝車載單元OBU,交通信號控制系統可監測到公交車輛到達,為公交車輛提供信號優先服務。
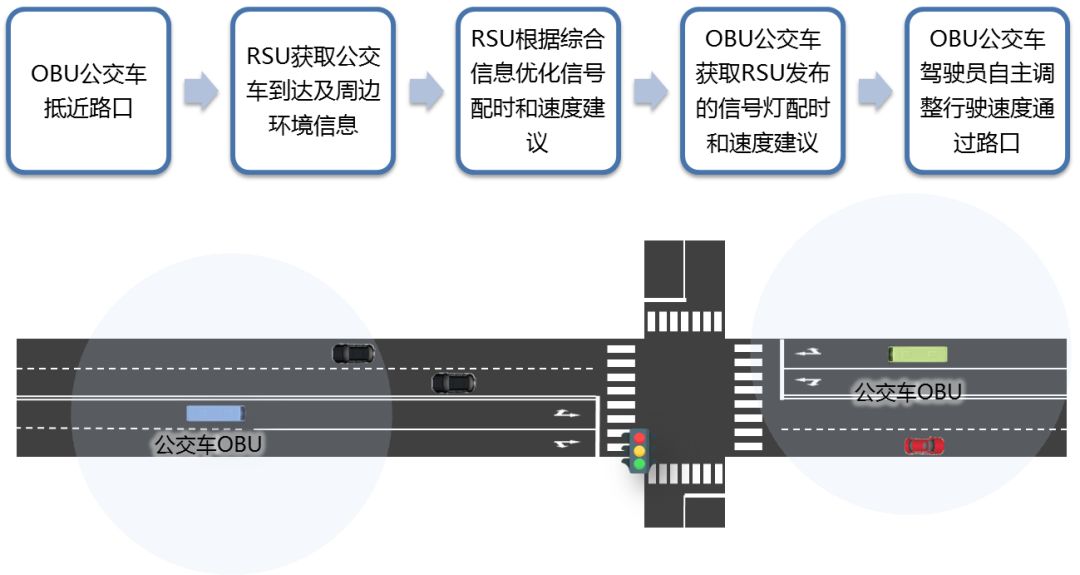
圖 8 公交優先通過路口場景示意圖
在都市區的公交專用車道上,公交車輛較多,公交車輛行駛安全性和效率問題都十分突出,車路協同系統可為公交車輛提供車隊行駛服務,減小車輛間隔,提高公交車輛的通行能力,并為公交車輛提供主動安全服務。
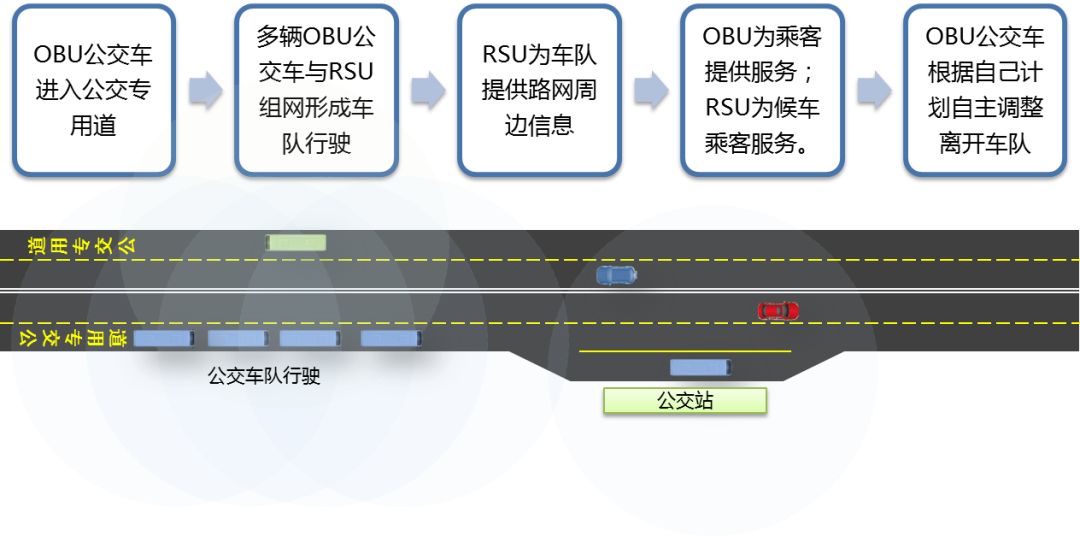
圖 9 公交車路協同車隊行駛應用示意圖
國內長沙、成都、武漢都分別實施了公交車路協同項目。取得了很好的效果。
圖 10CID長沙智慧公交示范線投入試運營
5、貨運車隊應用
自動駕駛技術在固定線路上可以實現以車隊運行的最有效率的駕駛方式,可以極大減少對貨車司機的需求,并極大地降低交通事故的發生概率,從而可以進一步降低運輸成本。當前自動駕駛技術比較適用于干線運輸這一細分場景,主要原因在于干線運輸行駛場景主要為高速公路,高速公路相比起城市主干道來說,行人、騎車人數量較少,復雜的道路路口、交通指示燈等設施相對較少,系統對道路上車輛行駛軌跡更好進行預測。
對于高速公路或國道交通流量較少的情況,可采用車隊行駛的方式,7-10貨運卡車組成車隊,頭車和尾車采用人員駕駛,中間車輛采用跟車無人駕駛的方式進行長途運輸。
6、園區、機場、港口應用
由于場景相對封閉、運行區域規范整潔的機場、碼頭、貨運場站等封閉區域汽車無人駕駛項目已成為無人駕駛應用的主要領域。
應用車路協同服務系統,對區域進行信息化改造,通過裝載路側單元及車載單元,實現車輛與車輛、車輛與基礎設施、車輛與云端的互聯互通,并進一步實現對單個車輛的運行控制及區域車輛的協調控制和管理,優化運行路線,能夠有效避免車輛碰撞、降低物流成本、提高貨物運輸的效率及貨運服務質量。
7、共享汽車應用
共享汽車是車路協同項目落地的最重要場景之一,自動駕駛也能夠為共享汽車降低成本。據不完全統計,我國已經有超過300個租賃汽車平臺,租賃汽車總量達約20萬輛,但目前為止,尚未有一家能實現盈利。這主要是因為租賃汽車是一個重運營產業,運營成本居高不下。若能夠通過自動駕駛實現自動調度、自動泊車,將大幅降低租賃汽車運營成本。
租賃汽車由于車輛移動具有方向性,每日需要較大的人員成本移動車輛。可以使用車隊跟車自動駕駛的方式組成車隊,7-10輛車組成車隊,頭車和尾車采用人員駕駛,中間車輛采用車隊無人駕駛模式。可利用凌晨2-3點道路車輛少的時間移動車輛,可大幅度減少移車成本。
8、試駕應用
試乘試駕車管理平臺對試駕車進行有效管理。首先通過車載OBD設備,采集4S店試乘試駕車輛的行駛數據,包括里程、路徑、時間、油耗等。同時在管理后臺實時監控試駕車輛違規操作和異常駕駛內容。如通過電子圍欄查看試駕車是否超出使用范圍,通過行駛數據查看實踐路線是否合理,是否按主機廠要求完成試駕數量等,最終實現車輛監控管理、試乘試駕統計、車輛配備管理及系統管理4部分功能在手機終端,銷售顧問可以通過APP端管理平臺,實現位置、導航、講解、評價、分享、積分等功能,確保試乘試駕全流程的用戶體驗。

圖 11 試乘試駕車管理平臺組成
9、其他應用場景
(1)智能停車
在車路協同環境下,配置車載終端的車輛可以實時與路側設備通信,智能停車系統可實時掌握車輛位置,因此停車誘導、停車收費等都可以很方便地實現。
(2)事故鑒定
車路協同車輛可以得到全程的數據記錄,發生事故后,可以調取汽車軌跡數據,協助事故責任鑒定。
(3)汽車保險評估
將來車路協同系統的盈利可能來自保險公司,保險公司可以根據網聯車的數據對車輛保險費用進行精算,取得合理的保險費率。
(4)車路協同大數據交易
車路協同大數據比以往的交通數據更精確和高質量。
-
車聯網
+關注
關注
76文章
2587瀏覽量
91638 -
無人駕駛
+關注
關注
98文章
4074瀏覽量
120623
原文標題:車路協同應用場景分析
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

射頻分析儀的技術原理和應用場景
系統放大器的技術原理和應用場景
SUMIF函數的應用場景分析
實時示波器的技術原理和應用場景
源測量單元設備的技術原理和應用場景
參數分析儀的技術原理和應用場景
NFC協議分析儀的技術原理和應用場景
USB協議分析儀的技術原理和應用場景
東軟助推“車路云一體化”場景落地
車路云協同,這次它真的來了嗎?

四維圖新張建平:緊抓車路云一體化發展機遇,推動更多應用場景落地

NanoEdge AI的技術原理、應用場景及優勢
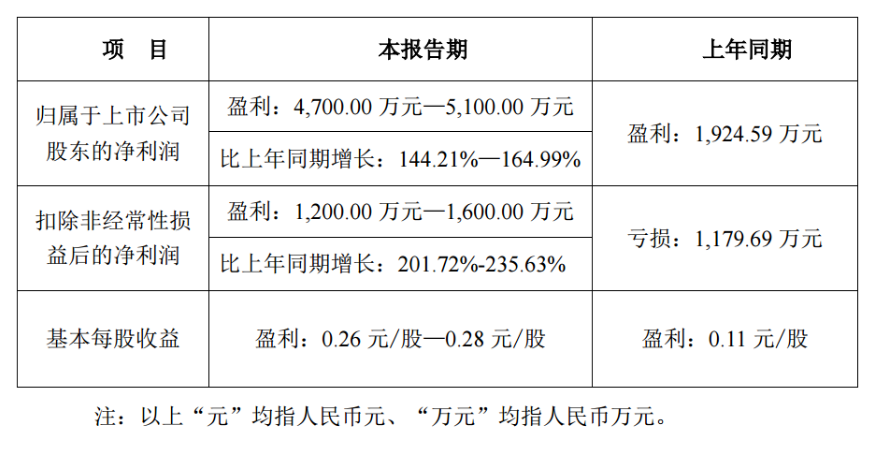
金溢科技業績大幅增長,車路協同業務優化貢獻顯著





 工商網監
工商網監
評論