 消費級設備在變得越來越好 需要更高的性能水平
消費級設備在變得越來越好 需要更高的性能水平
工業級及汽車級MEMS技術是相對消費級器件而言的,前者成本更高,但遠低于傳統光纖或環形激光陀螺儀技術。這里將從消費級市場開始,說明我們所稱的技術差別。
從多個角度看,這種技術差異都是值得關注的,正如前面所說的,目前市場上有很多應用,包括大量可穿戴技術和手機等,其動態角度估計能有幾度的分辨率精度就夠好了。對于手機而言,若想知道圖片的哪個方向朝上,精度只要大約45度就可以了。在手機上查看不同的東西或玩游戲時,常常也只需要3到5度的精度。
再看偏向于工業應用的器件,您會要求其性能高出10倍以上,而且要能承受更惡劣的環境條件,這很重要。使用成本不到10美元的器件時,年使用量可能是10,000只;再看工業級陀螺儀,使用量可能是數百只左右,成本可能是100美元,理解這一點很重要。
談論簡單運動和復雜運動時,想想它涉及到多少個軸。我拿著手機,沿著一個方向轉動,那么就是繞一個軸旋轉。這是相對簡單的運動。再想象有一輛無人駕駛汽車,沿著崎嶇的路面高速行駛。很顯然,它會沿著各個方向跳動,因此可以預期,所有三個軸方向上都有運動,不光是三個軸,還有線性和旋轉信息。您會考慮需要什么樣的精度,還有應用所處的條件。
從這里的說明可以看出,消費級設備在變得越來越好,但工業級設備也是如此。隨著時間推移,某些應用空間會成熟起來。消費級設備可能跟上一些發展,并且幫助解決許多需求,但總是存在一系列不斷發展的應用需要更高的性能水平,而且會有項目來證明為此付出額外的成本是值得的。
大量研究都發現了這樣一個趨勢:偏置和其他重要參數的長期穩定性與對傳感器中的機械應力的管理好壞有關。封裝已變得非常重要。往手機中添加東西時,需要把它做得盡可能小,成本盡可能低;不是任務需要的材料,每一微克都要從設備中去除。自然,它們會更容易受物理應力影響。甚至把手機放到口袋這樣簡單的事情也會導致封裝彎曲,改變其特性。對于這些事情,工業級IMU至少會在一階上進行處理。
下圖右上方是一個四諧振器內核,ADXRS64X系列陀螺儀實際上就是采用這種內核。該四諧振器內核提供兩種不同水平的線性抑制,我們稱之為器件的共模抑制。這使它在振動抑制方面實現了大跨越。尤其是0.0001度/秒/g2這一數據,對許多傳統上需要數萬美元解決方案才能上市的應用而言,可謂關系重大。現在,不到1,000美元的解決方案就能實現此類性能。它在面市時是非常令人激動的,今天仍然很常用。
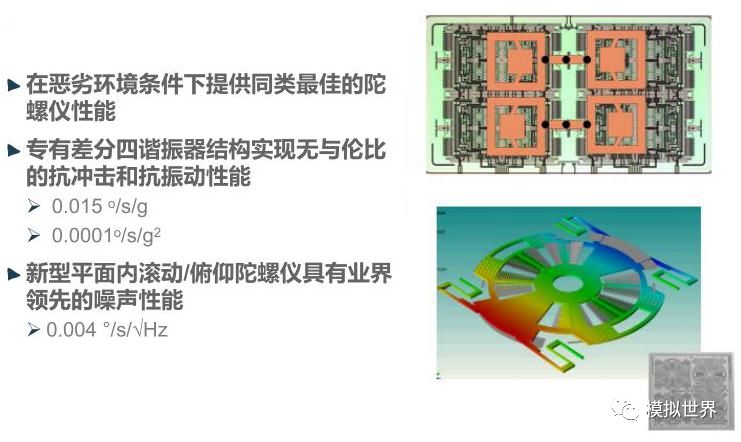
新一代傳感器技術,即右下方的彈性碟方法,是當前產品的核心技術,ADXRS290和ADIS16460慣性測量單元均采用該技術。利用多方面的工藝改進和全新的機械架構,我們得以降低噪聲和角向隨機游動,這在前面的幻燈片中已予以說明,其性能比我們過去的工業級產品線所采用的各種陀螺儀技術要高出4倍。
核心傳感器的典型性能差距在哪里?針對消費市場的MEMS IMU與針對工業市場的MEMS IMU進行比較時,又會顯露出哪些重要特性?跨軸靈敏度和線性振動抑制是兩個關鍵性能指標。
跨軸靈敏度
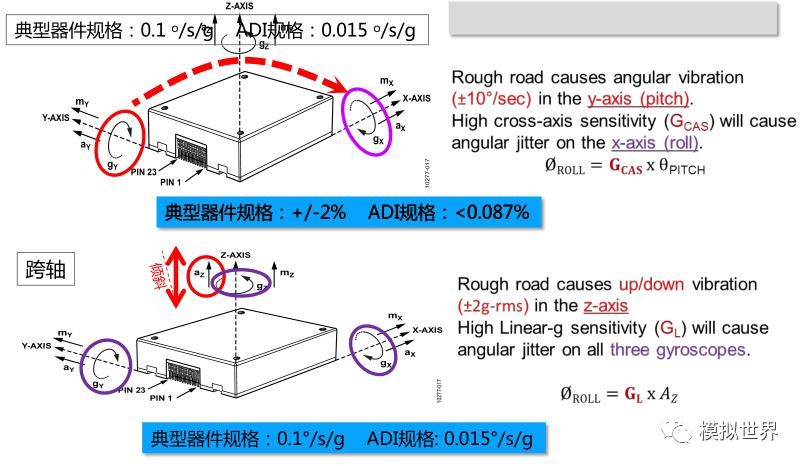
想象把一個IMU放在桌面上,并使它來回轉動。理論上,該運動只應顯示在一個陀螺儀上,假設是z軸。 x軸和y軸陀螺儀對此不應有所響應。然而,它們實際上會有所響應,跨軸靈敏度反映的就是這種響應的程度。跨軸靈敏度還與這些器件在內部的對齊程度有關。除物理對齊外,還有電子校準對齊。就跨軸靈敏度而言,一般器件的典型值為2%,而針對工業市場的MEMS器件則是不到0.1%。二者相差大約20倍,某些情況下您可以通過系統校準來彌補,但它仍有封裝依賴性,當封裝隨著時間而松弛時,跨軸靈敏度又會降低。因此,針對要求終身保持高性能的應用進行設計時,必須考慮這一10到20倍的性能差距。
線性振動抑制
想象一下,讓搭載IMU的印刷電路板在同一張桌子上沿線性方向來回運動。理論上,陀螺儀僅測量角向運動,因此其響應應為0。然而,由于器件制造的一些實際限制,所有MEMS陀螺儀對線性振動都有一定程度的響應。如何規定和說明這種響應,對制造商而言是一個重要判斷點,很多時候根本不做規定。即使做了規定,也不是在全頻率范圍內進行測定或規定。一個器件可能有100 Hz的諧振頻率,若用一個grms激勵它,陀螺儀上可能顯示一個10度/秒信號,這會擾亂所有需要一定精度水平的測量,因為它是一個非模式化的誤差。對此需要進行非常細致的研究,這是非常重要的。
以典型方式把這些參數放在相關情形下進行分析,紫色線表示速率噪聲密度。速率噪聲密度代表器件完全靜止時的輸出噪聲。橙色和紅色虛線表示我剛才討論的內容。這些是噪聲源,可能來自我們所稱的無關源,導航行業稱之為非模式化的能量源。市場上可能有這樣的器件:一個器件的紫色線比另一個器件要低,但機械諧振和線性振動響應卻要高得多。
如果只看一個噪聲參數,可能會輕信這只陀螺儀更好,但實際上,您需要關注所有三個參數和線性振動信息,甚至可能要估計軸上的旋轉量。全面地看問題,而不要片面地看問題,確實非常重要。從頻譜角度看,總噪聲就是曲線下方的面積。在這一特定情形中,總能量顯然是以線性振動響應為主,但不同應用會有不同的分析。重要的是,在作出關于使用何種產品的長期決策之前,務必注意這一點。
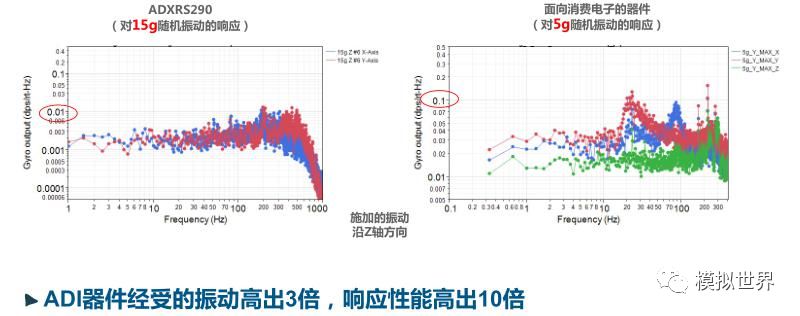
了解實際的測試信息非常重要。數據手冊常常不提供此類信息,需要您去詢問。多數公司開設了論壇,您可以在其中提問。如果不能在論壇中詢問,請通過銷售渠道查詢,能否找到生產線人員并咨詢。否則可能會出問題。這里給出了兩個不同陀螺儀的響應曲線,左邊是ADXRS290,右邊是一款主要針對消費市場的器件。雖然工業級器件經受的振動要高出3倍,但其性能仍然要高出10倍左右。若把它放到上一張圖片中,計算曲線下的總能量,濾波需求將很可怕,帶寬會非常低,因為這會影響穩定性控制。所以,了解這些重要區別是極其重要的。
IMU機械設計如何避免設計陷阱
第一,根據現有的最佳建議開始機械設計。通過前面的介紹,已經可以看到,機械設計不當會引起長期漂移。需要強調的是,如果把IMU安裝在不是針對它而設計的表面上,封裝上就會有應力,進而影響器件的行為。對此您應有所考慮。
第二個需要考慮的事項是:如何連接該器件?一般IMU產品的數據接口就是標準的SPI總線。如果是嵌入式SPI產品,它本質上是一個從機,您需要4條IO線來管理SPI接口。您需要電源,需要接地,有時還需要時鐘或數據就緒接口,但其實也就這么簡單。您需要考慮長期系統的接口類型。
第三是注意通信協議。ADI包括其他大部分IMU供應商在數據手冊都有簡單的測試案例,您可以在環運行,調試信號完整度、代碼、位序、時序等。另外,比如ADI,還提供示例代碼,它可幫助您快速上手,但其在細節上有所不同。它提供測試碼供您使用,您可以用示波器探頭排除各類故障。這也是大家都感興趣的一個方面。
-
傳感器
+關注
關注
2552文章
51383瀏覽量
756053 -
mems
+關注
關注
129文章
3958瀏覽量
191016 -
陀螺儀
+關注
關注
44文章
791瀏覽量
98913 -
自動駕駛
+關注
關注
784文章
13924瀏覽量
166876
原文標題:自動駕駛基礎(六十九) --慣性測量單元(IMU)十五
文章出處:【微信號:Analog_World,微信公眾號:模擬世界】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

飛騰云 - 音頻解決方案專家
我們的城市為什么越來越熱?


電感是越大越好還是越小越好呢?
國內消費級AR設備市場迎來爆發式增長,中國廠商技術實力獲市場認可
消費級路由器:優化網絡環境,提升設備性能
超級法拉電容器在消費電子領域能夠解決的問題?

嵌入式會越來越卷嗎?

晶振在SSD中的重要性,一篇文章讓你秒懂!
IC datasheet為什么越來越薄了?
工業級路由器的性能優勢






 工商網監
工商網監
評論