 一文讀懂圖像定位及跟蹤技術
一文讀懂圖像定位及跟蹤技術
在科學技術日新月異的今天,人們對機器設備的智能性、自主性要求也越來越高,希望其完全替代人的角色,把人們從繁重、危險的工作任務中解脫出來,而能否像人一樣具有感知周圍環境的能力已成為設備實現智能化自主化的關鍵。
廣義的“圖像跟蹤”技術,是指通過某種方式(如圖像識別、紅外、超聲波等)將攝像頭中拍攝到的物體進行定位,并指揮攝像頭對該物體進行跟蹤,讓該物體一直被保持在攝像頭視野范圍內。狹義的“圖像跟蹤”技術就是我們日常所常談到的,通過“圖像識別”的方式來進行跟蹤和拍攝。
因為紅外、超聲波等方式,都受環境的影響,而且要專門的識別輔助設備,在實際應用中已經逐步被“圖像識別”技術所替代。“圖像識別”是直接利用了攝像頭拍攝到的圖像,進行NCAST圖像差分及聚類運算,識別到目標物體的位置,并指揮攝像頭對該物體進行跟蹤。
圖像跟蹤系統采用特有的NCAST目標外形特征檢測方法,被跟蹤者無需任何輔助設備,只要進入跟蹤區域,系統便可對目標進行鎖定跟蹤,使攝像機畫面以鎖定的目標為中心,并控制攝像機進行相應策略的縮放。系統支持多種自定義策略,支持多級特寫模式,適應性強,不受強光、聲音、電磁等環境影響。
目標物體的邊緣檢測
物體的形狀特征在大多數情況下變化不多,基于目標形狀輪廓的跟蹤方法與基于區域的匹配方法相比,可以更精確的分割目標。
邊緣是運動目標的最基本特征,表現在圖像中就是指目標周圍圖像灰度有階躍變化或屋頂變化的那些像素集合,它是圖像中局部亮度變化最顯著的部分。
邊緣檢測就是采用某種算法來定位灰度不連續變化的位置,從而圖像中目標與背景的交界線。圖像的灰度變化可以用灰度梯度來表示。
梯度算子
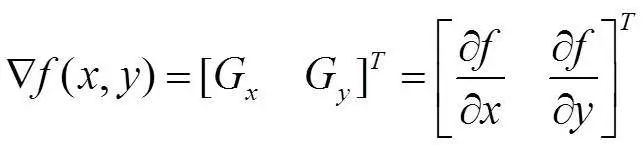
梯度也即一階導數,梯度算子對應一階導數算子,一階導數也即梯度可以表示為:
圖像經過邊緣檢測之后,還要經過輪廓追蹤和輪廓表達。輪廓跟蹤的目的是得到邊緣像素的集合邊緣表。輪廓表達則是通過對邊緣表做一些處理,如擬合、統計及逼近等,得到目標形狀特征的直觀表達,為后續匹配提供模板信息。
輪廓跟蹤的思想是:
1、根據提取的圖像邊緣,找出輪廓上的像素;
2、根據這些像素的特征用一定的“跟蹤準則”找出物體上的其他像素;
3、其跟蹤效果的好壞主要取決于起始點和跟蹤準則的選取兩個因素。
跟蹤準則:
按起始點選取準則找到最左下方位的邊界點后,以其為起始點,定義左上方為初始搜索方向,若該方向的點為黑點(特征點),則判其為邊界點,否則沿順時針方向旋轉搜索方向45度,依此類推,直到搜索到第一個黑點(特征點)為止,然后再把該黑點(特征點)作為新的邊界點,逆時針方向旋轉當前搜索方向90度,用相同的方法繼續搜索下一個黑點(特征點),直到找到初始邊界點為止。若用箭頭表示搜索方向,那么該輪廓跟蹤算法可以用圖表示。
通過上述算法得到物體的邊緣表后,可以用其作為輪廓表達,也可以對其進行處理,用處理后的信息形式來表達輪廓。目前常用的輪廓表達有以下三種:逼近擬合曲線法、內插擬合曲線法、統計特征法。
目標圖像顏色檢測
為了對豐富多樣的色彩進行表達,人們用表示顏色的三個參數所構成的三維空間來對圖像的顏色進行描述,這個三維空間就是所謂的顏色空間。
如:RGB格式(紅、綠、藍三基色模型)、HSV格式(色度、飽和度、亮度模型)
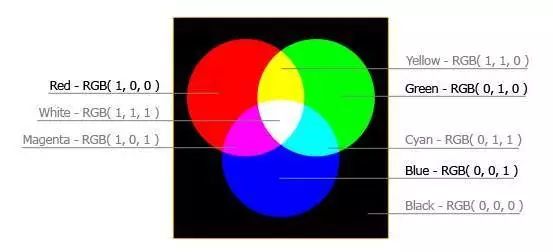
RGB格式是工業界的一種顏色標準,是通過對紅(R)、綠(G)、藍(B)三個顏色通道的變化以及它們相互之間的疊加來得到各式各樣的顏色的,RGB即是代表紅、綠、藍三個通道的顏色,這個標準幾乎包括了人類視力所能感知的所有顏色,是目前運用最廣的顏色系統之一。
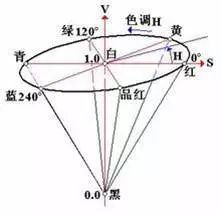
HSV格式:H參數表示色彩信息,即所處的光譜顏色的位置。該參數用一個角度量來表示,紅、綠、藍分別相隔120度。互補色分別相差180度。純度S為一比例值,范圍從0到1,它表示成所選顏色的純度和該顏色最大的純度之間的比率。S=0時,只有灰度。V表示色彩的明亮程度,范圍從0到1。有一點要注意:它和光強度之間并沒有直接的聯系。
例如:采用直方圖來表達圖像的顏色分布特征:1、對顏色進行量化;2、計算顏色落在各個小區間內的像素數量;3、對其進行直方圖投影就可以得到圖像的顏色概率分布圖像。
圖像濾波及形態學處理算法
運動目標提取時,為了消除相機采集的圖像中的噪聲、改善圖像質量,使圖像變得更清晰,需要對圖像進行濾波。幾種常見噪聲:高斯噪聲、加性噪聲及椒鹽噪聲等。
為了消除噪聲影響和突出圖像的一些特征,目前常用的方法有:鄰域均值濾波、中值濾波法等。
運動目標提取完成后,得到的二值化圖像可能含有許多空洞和孤立的噪聲點,為了更好地對目標進行定位和跟蹤,需要對得到的檢測結果進行形態學處理。
形態學處理主要思想是:采用一個特定的結構元素作為工具來度量和提取圖像特征(形狀、輪廓等),具體為看該結構元素是否可以適當有效地放入圖像內部。目前常用的形態學運算有:膨脹、腐蝕、開啟和閉合操作。
圖像匹配
圖像匹配是指在多幅圖像之間尋找對應關系的過程,具體為在一幀圖像中尋找與給定目標最相似的圖像區域或在一批圖像中尋找與目標最相似的圖像。
利用圖像匹配技術不僅可以檢測出搜索圖像中是否有目標圖像,還可以獲得目標在圖像中的相對位置信息。
匹配算法概括起來可以分為兩類:基于區域的匹配方法和基于特征的匹配方法。
基于區域的匹配方法
根據整幅圖像的灰度值信息,建立目標模板和待匹配目標圖像之間的相似性度量,然后采用相應的搜索算法,尋找待匹配目標圖像中相似性度量值最大的地方。
基于特征的匹配方法
提取圖像的特征,如特征點、邊緣、顏色、紋理等,對提取的特征進行加工處理將其表達成特定的形式(向量、直方圖),對加工后的圖像特征采用一定的相似性度量準則進行匹配以建立目標模板和待匹配圖像之間的對應關系。
圖像跟蹤技術的應用領域
目前,目標跟蹤技術主要應用于以下領域:
1、智能視頻監控:基于運動識別(基于步法的人類識別、自動物體檢測等),自動化監測(監視一個場景以檢測可疑行為);交通監視(實時收集交通數據用來指揮交通流動);
2、人機交互:傳統人機交互是通過計算機鍵盤和鼠標進行的,為了使計算機具有識別和理解人的姿態、動作、手勢等能力,跟蹤技術是關鍵;
3、機器人視覺導航:在智能機器人中,跟蹤技術可用于計算拍攝物體的運動軌跡;
4、虛擬現實:虛擬環境中3D交互和虛擬角色動作模擬直接得益于視頻人體運動分析的研究成果,可給參與者更加豐富的交互形式,人體跟蹤分析是其關鍵技術;
5、醫學診斷:跟蹤技術在超聲波和核磁序列圖像的自動分析中有廣泛應用,由于超聲波圖像中的噪聲經常會淹沒單幀圖像有用信息,使靜態分析十分困難,而通過跟蹤技術利用序列圖像中目標在幾何上的連續性和時間上的相關性,可以得到更準確的結果。
-
定位
+關注
關注
5文章
1336瀏覽量
35413 -
跟蹤
+關注
關注
1文章
38瀏覽量
14313
原文標題:一文讀懂圖像定位及跟蹤技術
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
如何理解圖像定位和跟蹤技術

學技術 | 一文讀懂 UWB 定位原理




基于Bluetooth低功耗技術的定位跟蹤方案






 工商網監
工商網監
評論