 F-OP300傾斜模塊上線——支持免像控傾斜模式
F-OP300傾斜模塊上線——支持免像控傾斜模式
F-OP300傾斜模塊采用獨特的雙相機傾斜設計方案,結合無人機管家智能航線設計,具備高質量的側面紋理采集及高效率的作業能力;其具備的逐相機打標和同步曝光能力,可有效的解決相機快門延時誤差,獲取每個相機的準確曝光位置信息;配合無人機管家數據處理模塊,可支持“高精度免像控傾斜攝影”作業模式,為1:500免像控三維測圖提供完整的軟、硬件解決方案,支持F200、F300機型使用。
一、載荷參數
載荷名稱:F-OP300
相機型號:SONY A6000
傳感器尺寸:23.4*15.6mm
有效像素:4800萬(6000*4000*2)
鏡頭參數:35mm定焦
采集分辨率:優于2cm
二、方案特點
(1)定制化鏡頭
F-OP300傾斜模塊相機鏡頭采用索尼定制35mm定焦鏡頭,鏡頭為缺省無窮遠對焦模式,減少相機設置難度,有效的提高了對焦穩定性及影像采集質量。
(2)往返航線設計
無人機管家中智航線中支持全自動的傾斜航線生成;規劃或導入區塊只需填寫所需分辨率及重疊度即可自動生成航線,具備自動劃分架次等功能。
航線設計圖
F-OP300傾斜航線默認為往返航線設計,搭配獨特的雙相機角度設計,單架次航線即可獲取覆蓋區域4方向側面紋理;同時,針對紋理要求不高的任務,選擇非往返設計即可建模,可以提高一倍的數據獲取能力。
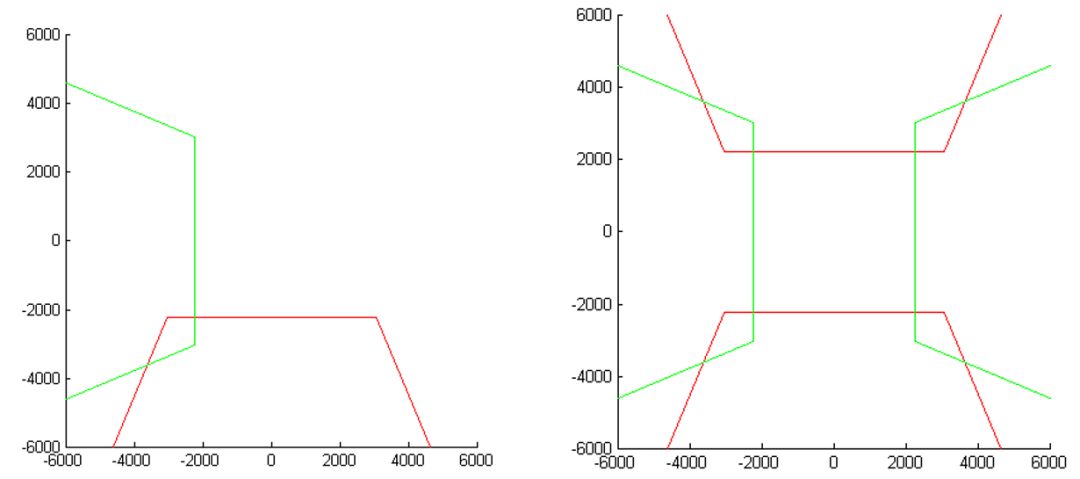
雙相機往返設計示意圖
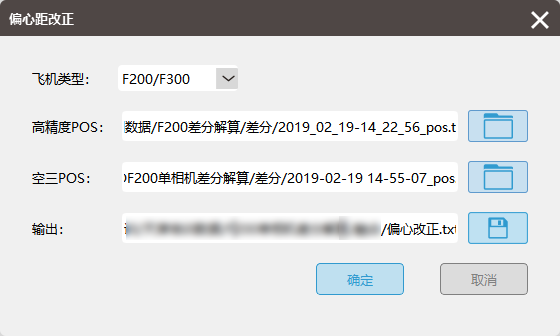
(3)偏心距改正
F200、F300機型可精確獲取GPS天線和相機之間的安置參數,經偏心改正處理后,可獲取每個相機的精確曝光位置,為免像控高精度作業提供保障。
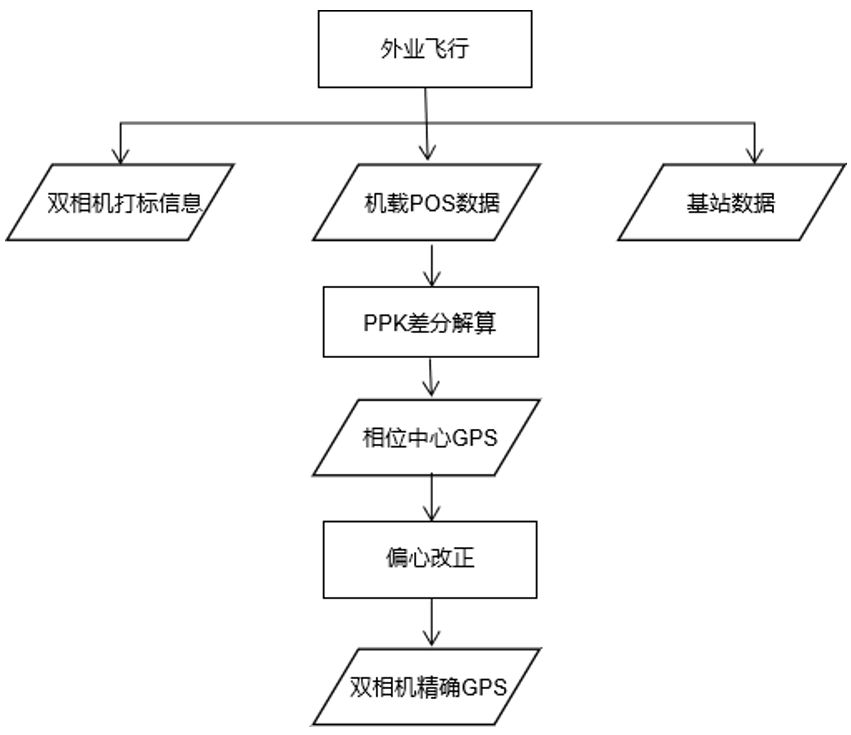
偏心改正處理流程
(4)作業效率
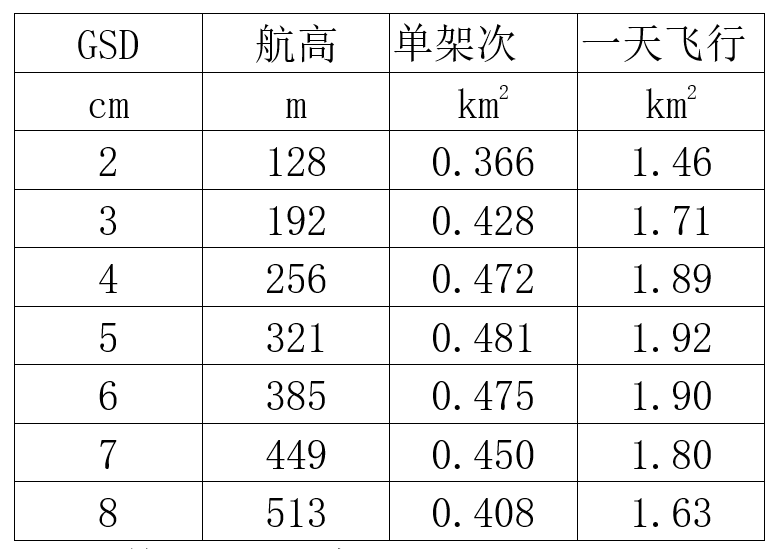
注:按照1天飛行4架次,單架次60km航程限制,80%×65%重疊度、往返航線統計。
三、1:500免像控傾斜應用案例
(1)測區概況
為驗證F200搭載F-OP300傾斜模塊免像控能力,2019年2月19日在天津寶坻檢校場獲取一組數據,飛行高度195cm,地面分辨率為2.5cm,航向重疊率80%,旁向重疊率65%,此次飛行共獲取0.7km2數據。
航線設計
(2)外場作業流程
在空曠處架設飛馬標配基站,連接千尋CORS采集基站點坐標并記錄靜態數據。F200采用手拋式起飛,按照預定航線進行數據獲取。
手拋F200
(3)數據處理流程
此次飛行獲取數據包括影像數據、飛機GPS觀測數據和基站靜態數據,利用無人機管家“智理圖”模塊進行差分解算,獲得高精度天線相位中心GPS數據。
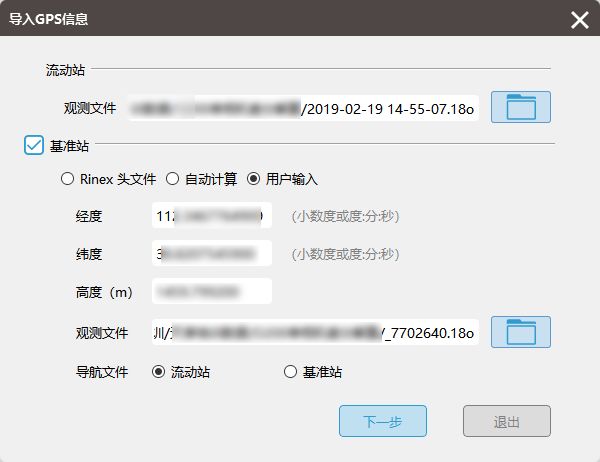
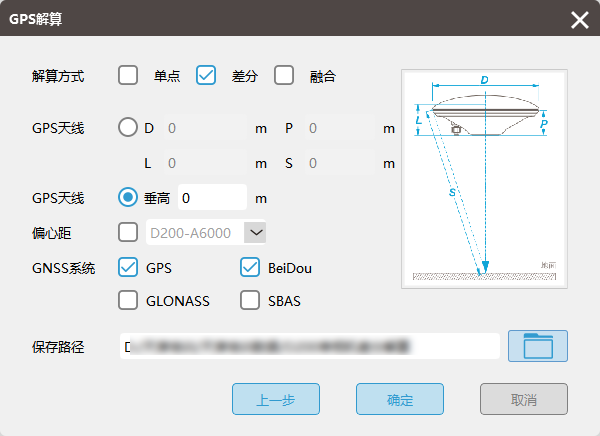
GPS差分解算
根據飛機安置角度、飛行姿態信息及打標時間進行偏心改正,獲得各個相機準確曝光點位置,用于后期基于高精度GPS的空三平差處理。
在“智拼圖”模塊導入影像和偏心改正后GPS,采用空三+PPK進行空三計算。
基于高精度GPS空三平差
空三結果
將無人機管家空三結果導入CC進行刺點,并將所有點都設為檢查點,查看預測點位(綠色)與實際點位誤差,均在2-3個像素。
刺點完成可在CC進行空三平差,檢查無控模式下的精度情況。由空三報告可知檢查點平面中誤差為2.6cm,高程中誤差為7.46cm。
預測點位誤差
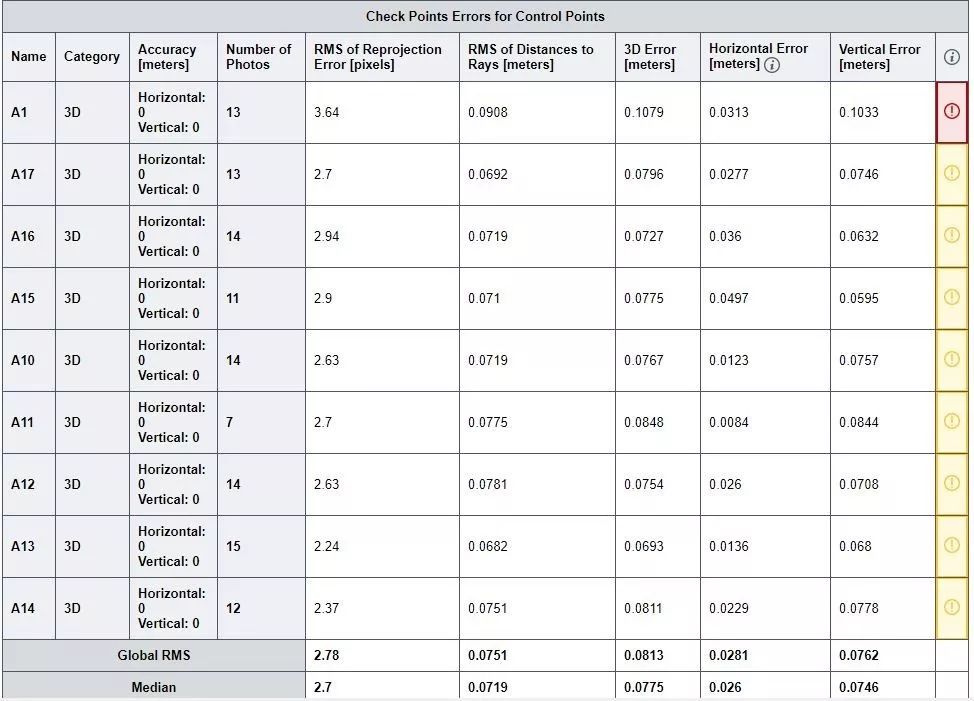
CC空三精度報告
(4)模型效果
基于無控空三成果進行三維模型重建,模型效果如下:
模型整體圖
模型局部圖
模型細節圖
(5)三維成果精度
采用檢查點檢核三維模型精度,經統計,三維模型的檢查點平面中誤差為5.5cm,高程中誤差為7.7cm。
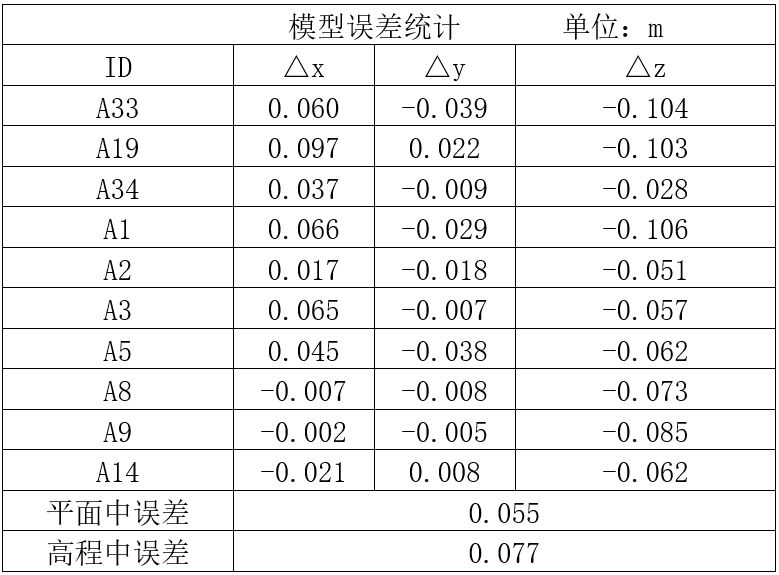
三維模型誤差報告
由此可知,F200搭載F-OP300傾斜模塊的三維測圖解決方案可以滿足航測1:500地形測圖精度要求。該方案可大大減少了外業布控工作量,提高作業效率,適用于大面積高精度三維建模等工程項目。
-
相機
+關注
關注
4文章
1350瀏覽量
53582 -
數據處理
+關注
關注
0文章
595瀏覽量
28554 -
無人機
+關注
關注
229文章
10420瀏覽量
180149
原文標題:F-OP300傾斜模塊上線——支持免像控傾斜模式
文章出處:【微信號:feimarobotics2015,微信公眾號:飛馬機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
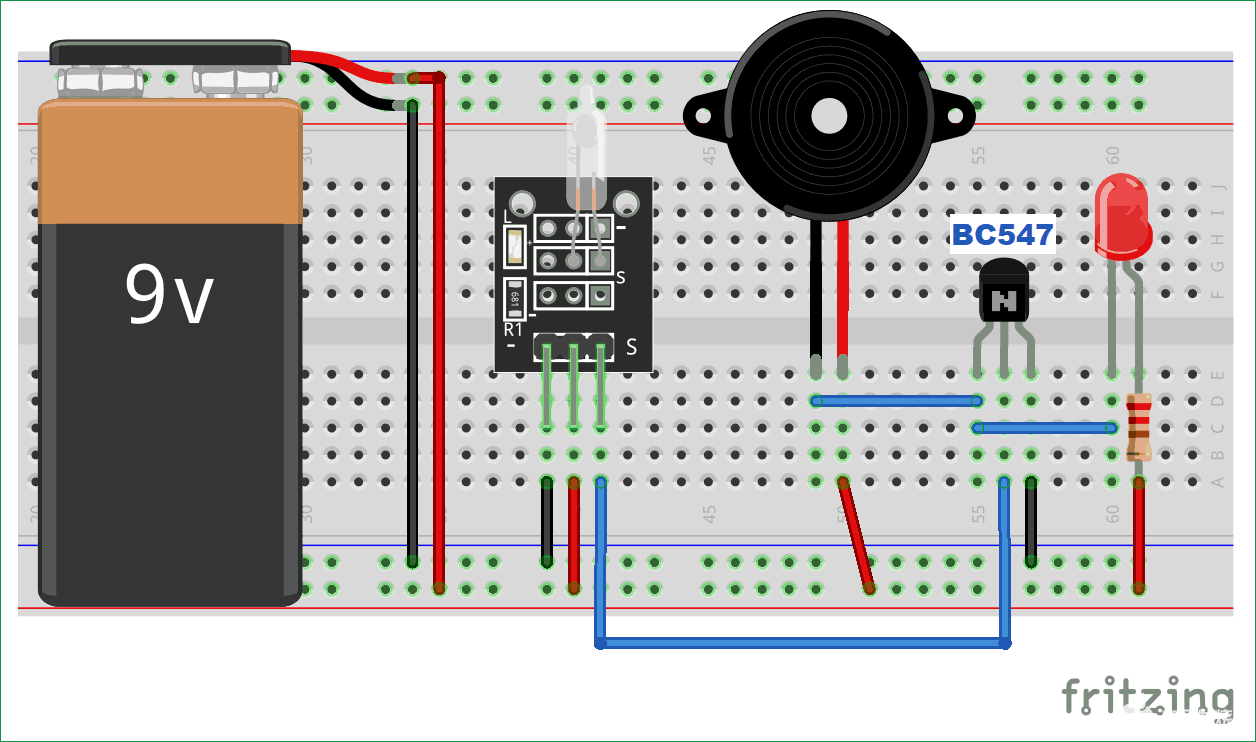
傾斜傳感器開關電路分析
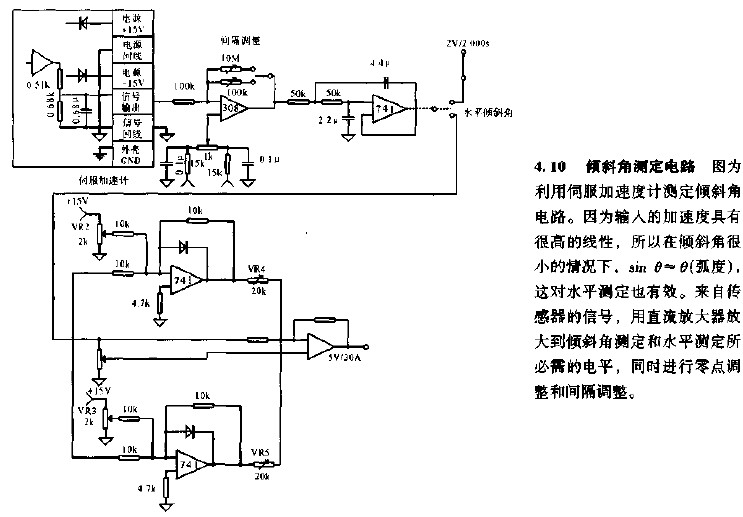
高精度傾斜儀SST211
ADI公司高精度易使用的傾斜傳感器
新型傾斜傳感器研究
傾斜在線監測系統的特點介紹
簡述Hive 數據傾斜問題定位排查及解決
傾斜傳感器的種類與選擇技巧
電桿傾斜監測裝置 桿塔傾斜監測裝置 支持數據實時讀取 精確預警






 工商網監
工商網監
評論