 如何簡化汽車的ECU?
如何簡化汽車的ECU?
在任何功能的背后,都必須有硬件的支撐,就像數碼相機僅僅有鏡頭還不夠,也需要機身里的那塊 CMOS 或 CCD 芯片,而且,在數碼時代,這個芯片水平如何,直接決定了相機的檔次。
而在汽車上,需要用到比照相機里多得多的芯片,它們被稱為“電子控制單元”,也就是 ECU(Electronic Control Unit)。很多人認為 ECU 特指發動機程序,但事實上,整個車子的電子系統由非常多的 ECU 組成,它們分別用來控制車子的各種功能,比如車燈、娛樂系統、防盜系統等等。
隨著車子電子化程度越來越高,尤其是自動駕駛、主動安全等功能的增加,車子的 ECU 會急速增加,有預測說,在未來五年里,車子里的 ECU 平均會達到 50-70 個,而現在一些電子結構復雜的車子,ECU 數量早就超過了一百。
但是,這篇文章聊的不是ECU 到底能多到什么程度,而是怎么把 ECU 簡化。
從一對一到一對多
討論這個話題,咱們以現在最火的自動駕駛舉例子。在一輛自動駕駛車里,可能包括激光雷達、毫米波雷達、中距離雷達、前攝像頭、后攝像頭等不同的傳感器,而通常的做法是,每一個傳感器都由一個芯片負責處理數據。
支撐起自動駕駛的數據量、運算量都是巨大的,而這些芯片,都要在一張 CAN 總線的網絡上去部署(特斯拉使用的以太網和它們相比太超前了),它的問題在于:這個網本身就慢。到底有多慢?可以看下面這張圖:
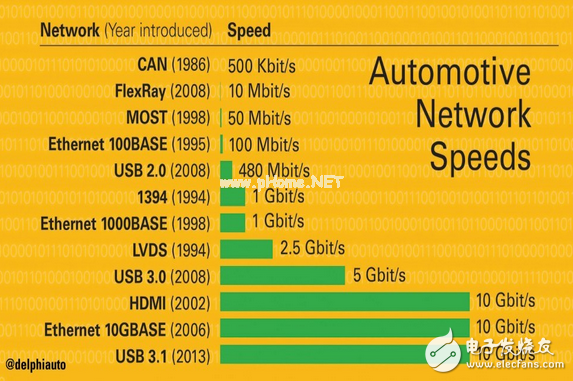
網絡本來就慢,再加上這些芯片是分散排布,數據交換是快不起來的,芯片越多,效率越低。這樣還怎么玩自動駕駛?
把一對一變成一對多就成了一種解決方式,把這些芯片集中到一起,用數量更少的芯片組或者是一個運算能力超強的芯片作為神經中樞,去配合那些傳感器進行工作,在汽車電子網絡部署上,這就意味著簡化。
如果按照傳統的汽車電子架構,想加更多功能,就要掛更多的 ECU 上去,要加強運算能力,也得通過加更多 ECU 的方式,但是,隨著數據傳輸的容量要求越來越大,靠增加 ECU 的數量就行不通了。
這種先天和后天的優劣,有過裝修經驗的人應該懂,就像做水電改造一樣,前期打好基礎的話,后續的升級改造都會輕松不少。
這種一對多的方式,在車子里可以稱為“多域控制器”(Multi-Domain Controllers),但是目前并沒有被應用在量產車里。在零部件供應商德爾福的上海總部參觀時,我看到了一個多域控制器樣品:
如果你這兩年比較關注汽車電子,應該知道奧迪展出過名為“zFAS”的自動駕駛控制模塊,這其實就可以理解為德爾福那個多域控制器的“奧迪定制版”。奧迪先后展示過兩個版本的 zFAS,第二版比第一版更精簡,集成度更高。
它看起來像一塊主板,以二代為例,上面集成的芯片包括:Altera’s Cyclone V SoC FPGAs、32 位 TriCore Tm based multicore uController、Mobileye EyeQ3、NVIDIA Tegra K1 處理器,可以實現完整的數據、規劃、決策處理,而且,從傳感器到這個“主板”,使用的是以太網傳輸數據。而且,除了自動駕駛功能,它還集成進了很多和車輛控制有關的功能。

德爾福的工程師還舉了一個例子:當液晶儀表盤和中控屏幕使用同一個處理芯片時,它們就會更緊密的成為一個整體,分工配合的去顯示不同的內容,提供更好的 HMI 體驗。
集成化到底有多重要?
其實,這個原因不難理解。
可能我們平時買車、用車看的只是外觀、動力、操控,但事實上,在這些東西背后,汽車的電子電氣架構才是真正的“骨骼”。現在的大部分車子還是用的那套老舊骨骼,但現實是,汽車的智能化程度要越來越高,傳統的電子架構很難滿足這種需求(前面已經說過),于是,就需要車子用一種全新的架構來應對這種智能化趨勢。
當然,更強的計算能力是必須的。
而從另一個角度來說,也正是因為智能化程度的提高,車子對于電子安全方面的要求越來越高,更集成化的架構,有助于更好的去部署防御機制。
芯片的集成化意味著車子真正變成了一個整體。如果說未來的汽車是一個電腦+四個輪子,那么“一個電腦”就意味著把原來散步的處理芯片都集合到一起(當然,并不是所有 ECU 都可以集成進來)。都喜歡說“體制”,這其實就是體制上的改變。
再聊回到自動駕駛上,隨著自動駕駛等級的不斷提升,芯片集成化的趨勢會越來越明顯。
-
ecu
+關注
關注
14文章
890瀏覽量
54577 -
汽車
+關注
關注
13文章
3546瀏覽量
37422
發布評論請先 登錄
相關推薦
汽車電子控制單元ECU的設計
汽車ECU以及外圍線路
汽車ECU控制碳罐電磁閥
汽車ECU的低功耗高性能實現
一款基于FPGA的汽車ECU設計
ECU的原理是什么?
汽車中的ECU, VCU, MCU, HCU分別是什么
汽車ECU標定系統的解決技術原理
汽車ECU是什么?ECU是如何工作的
合適的電源可以簡化汽車ECU設計





 工商網監
工商網監
評論