") PLC是通過控制發(fā)送的脈沖來(lái)控制伺服電機(jī)
PLC是通過控制發(fā)送的脈沖來(lái)控制伺服電機(jī)
速度控制一般都是有變頻器實(shí)現(xiàn),用伺服電機(jī)做速度控制,一般是用于快速加減速或是速度精準(zhǔn)控制的場(chǎng)合,因?yàn)橄鄬?duì)于變頻器,伺服電機(jī)可以在幾毫米內(nèi)達(dá)到幾千轉(zhuǎn),由于伺服都是閉環(huán)的,速度非常穩(wěn)定。轉(zhuǎn)矩控制主要是 控制伺服電機(jī)的輸出轉(zhuǎn)矩,同樣是因?yàn)樗欧姍C(jī)的響應(yīng)快。應(yīng)用以上兩種控制,可以把伺服驅(qū)動(dòng)器當(dāng)成變頻器,一般都是用模擬量控制。
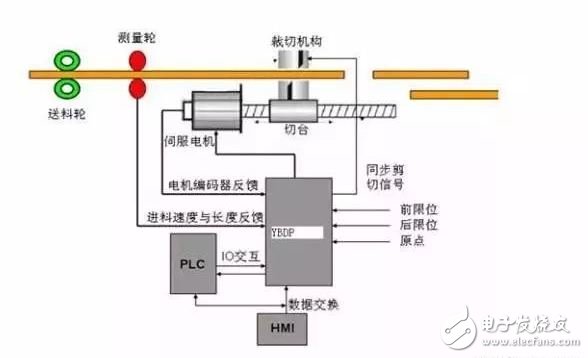
伺服電機(jī)最主要的應(yīng)用還是定位控制,位置控制有兩個(gè)物理量需要控制,那就是速度和位置,確切的說(shuō),就是控制伺服電機(jī)以多快的速度到達(dá)什么地方,并準(zhǔn)確的停下。
伺服驅(qū)動(dòng)器通過接收的脈沖頻率和數(shù)量來(lái)控制伺服電機(jī)運(yùn)行的距離和速度。比如,我們約定伺服電機(jī)每10000個(gè)脈沖轉(zhuǎn)一圈。如果PLC在一分鐘內(nèi)發(fā)送10000個(gè)脈沖,那么伺服電機(jī)就以1r/min的速度走完一圈,如果在一秒鐘內(nèi)發(fā)送10000個(gè)脈沖,那么伺服電機(jī)就以60r/min的速度走完一圈。
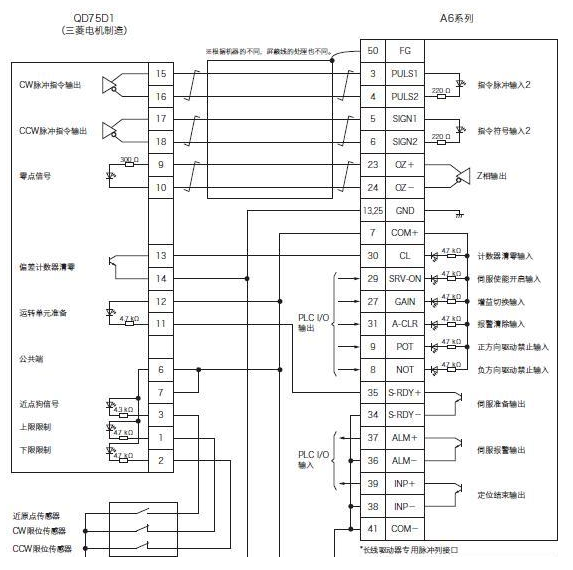
所以,PLC是通過控制發(fā)送的脈沖來(lái)控制伺服電機(jī)的,用物理方式發(fā)送脈沖,也就是使用PLC的晶體管輸出是最常用的方式,一般是低端PLC采用這種方式。而中高端PLC是通過通訊的方式把脈沖的個(gè)數(shù)和頻率傳遞給伺服驅(qū)動(dòng)器,比如Profibus-DP CANopen,MECHATROLINK-II,EtherCAT等等。這兩種方式只是實(shí)現(xiàn)的渠道不一樣,實(shí)質(zhì)是一樣的,對(duì)我們編程來(lái)說(shuō),也是一樣的。這也就是我想跟大家說(shuō)的,要學(xué)習(xí)原理,觸類旁通,而不是為了學(xué)習(xí)而學(xué)習(xí)。
對(duì)于程序編寫,這個(gè)差別很大,日系PLC是采用指令的方式,而歐系PLC是采用功能塊的形式。但實(shí)質(zhì)是一樣的,比如要控制伺服走一個(gè)絕對(duì)定位,我們就需要控制PLC的輸出通道,脈沖數(shù),脈沖頻率,加減速時(shí)間,以及需要知道伺服驅(qū)動(dòng)器什么時(shí)候定位完成,是否碰到限位等等。無(wú)論哪種PLC,無(wú)非就是對(duì)這幾個(gè)物理量的控制和運(yùn)動(dòng)參數(shù)的讀取,只是不同PLC實(shí)現(xiàn)方法不一樣。
文章來(lái)源:運(yùn)控伺服
免責(zé)聲明:本文系網(wǎng)絡(luò)轉(zhuǎn)載,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請(qǐng)第一時(shí)間告知,我們將根據(jù)您提供的證明材料確認(rèn)版權(quán)并按國(guó)家標(biāo)準(zhǔn)支付稿酬或立即刪除內(nèi)容!本文內(nèi)容為原作者觀點(diǎn),并不代表本公眾號(hào)贊同其觀點(diǎn)和對(duì)其真實(shí)性負(fù)責(zé)。
-
plc
+關(guān)注
關(guān)注
5022文章
13449瀏覽量
467300 -
變頻器
+關(guān)注
關(guān)注
252文章
6630瀏覽量
146727 -
伺服電機(jī)
+關(guān)注
關(guān)注
85文章
2068瀏覽量
58573
原文標(biāo)題:PLC如何控制伺服電機(jī)
文章出處:【微信號(hào):wwygzxcpj,微信公眾號(hào):電機(jī)技術(shù)及應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
PLC工程師須掌握的3種伺服電機(jī)的控制方式
PLC工程師必知的3種伺服電機(jī)的控制方式
PLC使用脈沖方式控制伺服電機(jī)

伺服如何實(shí)現(xiàn)脈沖控制及優(yōu)缺點(diǎn)
PLC工程師都應(yīng)了解的3種伺服電機(jī)控制方式
伺服電機(jī)如何選擇脈沖、模擬量、通訊三種控制方式







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論