 伺服電機如何進行快速的測試?
伺服電機如何進行快速的測試?
在工業自動化領域中,伺服電機作為執行元件在自動化控制系統中被越來越多的用戶使用。各位工程師在剛拿到新的伺服電機后,為了確認電機是否是好用的,往往需要對伺服電機進行簡單的調試測試,那么有沒有一種簡便的方法可以對電機進行快速測試呢?
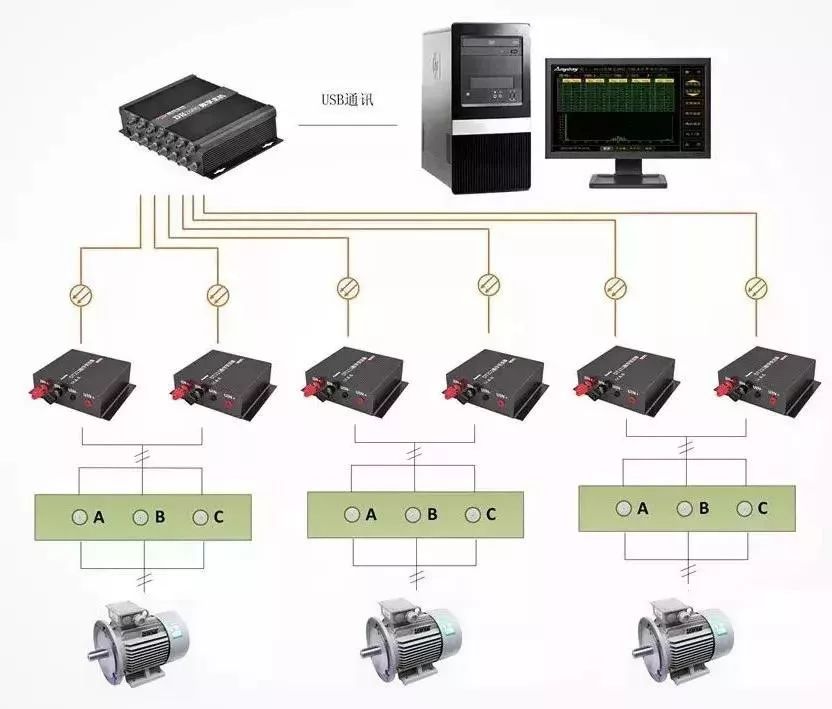
測試伺服電機時,我們需要使用一臺伺服電機驅動器。市面上主流的伺服電機驅動器都是使用標準CANopen協議通信的,但是也有一部分廠家使用的是自定義協議,這里我們主要介紹如何與使用標準CANopen協議通信的伺服電機驅動器進行通信調試。使用標準CANopen協議通信的伺服電機驅動器全部都是遵循CANopen CiA301和402規范的,因此我們可以使用電腦與其通信。我們準備了一個USBCAN設備作為CANopen主站與伺服電機驅動器通信。
USBCAN-IIPro原CANopen主站功能演示視頻:
不使用該功能時,以速度控制為例,我們需要依次向其發送以下數據:
1.幀ID:000 幀數據:80 01
(將CANopen從站設為預操作狀態)
2.幀ID:60x(x為節點號) 幀數據:2F 60 60 00 03 00 00 00
(此操作是使用SDO命令配置驅動器進入速度控制模式)
3.幀ID:60x 幀數據:23 FF 60 00 00 00 00 00
(此操作是使用SDO命令配置電機目標速度為0)
4.幀ID:60x 幀數據:2B 40 60 00 06 00 00 00
幀ID:60x 幀數據:2B 40 60 00 07 00 00 00
幀ID:60x 幀數據:2B 40 60 00 0F 00 00 00
(這三條指令用于改變驅動器狀態,從準備接通切換至接通再切換至允許操作)
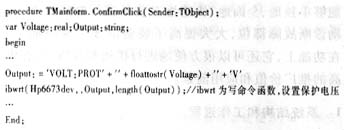
5.之后我們通過命令可以實現對電機目標速度的配置,比如發送以下數據:
幀ID:60x 幀數據:23 FF 60 00 64 00 00 00
(將伺服電機轉速調為100轉,如下圖所示)
操作完以上步驟后,即可看到伺服電機開始轉動。由此可見,我們使用USBCAN發送一些基本的CAN數據就可以控制伺服電機轉動,但是這種方式需要發送的數據較多且復雜,為了方便各位工程師調試,我公司在新版本ECANtools(5.8.0)軟件中加入了“控制伺服驅動”功能,各位工程師只需依次點擊界面中的三個按鈕即可實現對伺服電機的調試,如下圖:
目前該功能僅有USBCAN-Ipro、USBCAN-IIpro兩款設備支持,詳情請見:ECANtools使用說明書。
手冊地址:http://www.gcgd.net/yhsc/ECANTools.PDF
-
伺服電機
+關注
關注
85文章
2051瀏覽量
57964
原文標題:如何使用USBCAN設備控制伺服電機
文章出處:【微信號:gccanzx,微信公眾號:廣成工控】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
伺服電機、變頻電機、普通電機的區別



如何進行RF PA Ruggedness的測試和評估呢?






 工商網監
工商網監
評論