

姿態(tài)探測(cè)指在三維空間中測(cè)量物體的方向和旋轉(zhuǎn),這種技術(shù)對(duì)于飛機(jī)與航天器的導(dǎo)航至關(guān)重要。最近的研究證實(shí),環(huán)形激光陀螺儀和纖維環(huán)陀螺儀能夠替代傳統(tǒng)的機(jī)械陀螺儀,精確地測(cè)量旋轉(zhuǎn)運(yùn)動(dòng)。此裝置的基本工作原理是一種被稱作薩格納克效應(yīng)的光學(xué)現(xiàn)象。在本文中,我們將利用射線光學(xué)仿真,觀察簡(jiǎn)單薩格納克干涉器中的薩格納克效應(yīng)。
究竟是我還是房間在旋轉(zhuǎn)?
任何導(dǎo)航系統(tǒng)的一項(xiàng)基本任務(wù)是保持追蹤物體的位置和方向,以及二者的變化率。導(dǎo)航系統(tǒng)對(duì)精度的要求達(dá)到了極致,特別是太空航行領(lǐng)域。舉例來說,通信衛(wèi)星可以敏感地響應(yīng)千分之一度每小時(shí)的細(xì)微角速度。
系統(tǒng)對(duì)精度的要求固然令人生畏,不過事實(shí)上姿態(tài)控制的基本任務(wù)可以歸納為一個(gè)簡(jiǎn)單的問題:如何確定我的旋轉(zhuǎn)速度以及旋轉(zhuǎn)軸?
原則上講,對(duì)于任意旋轉(zhuǎn)坐標(biāo)系中的任何觀測(cè)者而言,這個(gè)任務(wù)都是相同的,即便是旋轉(zhuǎn)餐廳中的賓客也不例外。
印度國(guó)賓大酒店的旋轉(zhuǎn)餐廳的照片,它是印度歷史最悠久的旋轉(zhuǎn)餐廳。該照片由 AryaSnow 拍攝,已獲 CC BY-SA 4.0 授權(quán),并通過 Wikimedia Commons 共享。
假設(shè)你坐在旋轉(zhuǎn)餐廳里面就餐,現(xiàn)在正在推斷餐廳的角速度 Ω(單位:rad/s)。
最簡(jiǎn)單的方法就是往外看。選取一個(gè)靜止的目標(biāo),比如建筑物或樹,然后觀察在你的視野中它的位置是否會(huì)隨時(shí)間變化。
上圖展示了在觀察者的視野中(比如從窗戶往外看),樹在初始時(shí)間 t1 和時(shí)間 t2 時(shí)的位置。設(shè)兩個(gè)視線之間的角度為 θ(單位:度)。如果相對(duì)于餐廳本身的大小,樹的距離很遠(yuǎn),角速度的計(jì)算公式則為
太空中的相似場(chǎng)景
太空航行的難度比在餐廳吃飯大得多,所以我們必須注意幾個(gè)額外事項(xiàng)。在太空中,“靜止物體”的方法比較難實(shí)現(xiàn)。舉例來說,當(dāng)我們利用太陽(yáng)敏感器對(duì)地球靜止軌道上的衛(wèi)星進(jìn)行姿態(tài)控制時(shí),還要考慮地球繞太陽(yáng)轉(zhuǎn)動(dòng)的相對(duì)運(yùn)動(dòng)。相比之下,恒星敏感器的精度極其可靠,這是因?yàn)榛诟鞣N目標(biāo)前提,我們可以認(rèn)為恒星在太空的位置是始終不變的,且恒星更接近于一個(gè)光點(diǎn),而不是有一定角度的連續(xù)光源。
除此之外,在航天器姿態(tài)測(cè)量與控制對(duì)精度的嚴(yán)苛標(biāo)準(zhǔn)下,被觀測(cè)物體的有限尺寸也需要考慮到,比如當(dāng)你看向太陽(yáng)時(shí),要知道自己在觀察太陽(yáng)的哪一部分。在三維空間中實(shí)現(xiàn)任意旋轉(zhuǎn)至少需要兩個(gè)物體,否則你不能判斷旋轉(zhuǎn)軸的方向。
遮住視野
現(xiàn)在我們又回到原來的餐廳,只不過這次窗戶都關(guān)上了。既然向外看的視線被遮擋住了,你不能依賴于任何物體來判斷旋轉(zhuǎn)坐標(biāo)系。
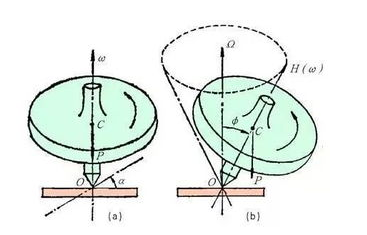
我們可以在旋轉(zhuǎn)坐標(biāo)系內(nèi)做幾個(gè)實(shí)驗(yàn)來確定它的角速度。比如在地板上放一個(gè)球,觀察離心力是否會(huì)使它滾動(dòng)(這時(shí)你需要知道旋轉(zhuǎn)軸的位置——在太空航行中可不一定行!)。另一個(gè)方法是使用機(jī)械陀螺儀。
下個(gè)章節(jié)將解釋第三種方法——利用光的特性;準(zhǔn)確地說,真空中的光在所有坐標(biāo)系中擁有相同速度的特性。光在旋轉(zhuǎn)坐標(biāo)系中傳播時(shí),它揭示了一種被稱作薩格納克效應(yīng)的現(xiàn)象。環(huán)形激光陀螺儀 就是利用了這種效應(yīng)。這種陀螺儀廣泛取代了利用高速回轉(zhuǎn)體的傳統(tǒng)機(jī)械式陀螺儀,環(huán)形激光陀螺儀舍棄了活動(dòng)部件,因此維護(hù)成本更低。
解釋薩格納克效應(yīng)
觀察薩格納克效應(yīng)最簡(jiǎn)單的方法是:利用兩束在同一個(gè)圓環(huán)中對(duì)向傳播——即反向運(yùn)動(dòng)——的光線。圓環(huán)以恒定的角速度 Ω 逆時(shí)針旋轉(zhuǎn)。(國(guó)際單位是弧度每秒,不過在慣性導(dǎo)航系統(tǒng)中,我們可以用度每秒來代替它。)
初始時(shí),兩束光線從圓環(huán)的 P0 點(diǎn)發(fā)射,沿圓環(huán)以光速反向傳播,與此同時(shí),發(fā)射點(diǎn)開始繞坐標(biāo)系旋轉(zhuǎn)。當(dāng)沿順時(shí)針方向傳播的光線與發(fā)射點(diǎn)再次重合時(shí),重合點(diǎn)為一個(gè)新的位置 P1,傳播距離略小于一個(gè)完整的圓。當(dāng)沿逆時(shí)針方向傳播的光線與發(fā)射點(diǎn)重合時(shí),重合點(diǎn)為另一個(gè)不同的位置 P2,其傳播距離大于一個(gè)完整的圓。
當(dāng)然,這里的運(yùn)動(dòng)顯然被夸大了。在現(xiàn)實(shí)中,P0 同 P1 和 P2(以及后者之間)的位移可能小一百億倍!但是因?yàn)閮墒饩€的距離差伴隨著相移,而相移會(huì)在兩束光線之間產(chǎn)生干涉圖案,所以兩束光線的傳播距離的細(xì)微差別(同理還有傳播時(shí)間)還是可檢測(cè)到的。若設(shè) ΔL 為兩束光線傳播的距離差,則
(1)
其中,A 是圓環(huán)面積,真空光速為 c0 = 299,792,458 m/s。
事實(shí)證明,方程 (1) 不僅符合環(huán)形路徑,也適用于其他形狀。光程差只取決于環(huán)路的封閉面積,而不是形狀。我們可以根據(jù)廣義相對(duì)論推導(dǎo)出方程 (1) 的一般表達(dá)式。方程的核心在于,薩格納克效應(yīng)是一種相對(duì)論現(xiàn)象,對(duì)于這種現(xiàn)象,經(jīng)典推導(dǎo)可以得到相同的一階結(jié)果。參考文獻(xiàn) 1–2。
利用射線光學(xué)仿真演示薩格納克效應(yīng)
在本節(jié)中,我們將研究簡(jiǎn)單的薩格納克干涉儀模型。它的基本工作原理與環(huán)形激光陀螺儀相同,不過前者不需要考慮光束路徑上的激光介質(zhì),所以模型創(chuàng)建步驟更加簡(jiǎn)單。(除了強(qiáng)度更大之外,激光介質(zhì)還會(huì)引入很多其他復(fù)雜性,比如色散效應(yīng),不過為了方便描述,我們可以忽略。)但是,對(duì)于給定的薩格納克干涉儀模型幾何與擁有相同鏡子布局的環(huán)形激光干涉儀,二者會(huì)產(chǎn)生同樣的光程差和相位延遲,所以這個(gè)模型依舊可以提供大量信息。
基本的薩格納克干涉儀幾何由一個(gè)分光器、兩面鏡子和一個(gè)可吸收射出光線的障礙物組成。圖示如下。
此模型的幾何參數(shù)見下表。
| 參數(shù)名稱 | 公式 | 值 | 描述 |
|---|---|---|---|
| λ0 | N/A | 632.8 nm | 真空波長(zhǎng) |
| R | N/A | 10 cm | 圓環(huán)半徑 |
| b |
 |
17.3 cm | 三角形邊長(zhǎng) |
| P |
 |
52.0 cm | 三角形周長(zhǎng) |
| A |
 |
130 cm2 | 三角形面積 |
幾何結(jié)構(gòu)有時(shí)被設(shè)計(jì)成正方形,而不是三角形,這時(shí)三個(gè)鏡子位于三個(gè)頂點(diǎn)上,分光器在另一個(gè)頂點(diǎn)上。系統(tǒng)中光線的傳播路徑通過方向箭頭來表示。由于整個(gè)裝置沿逆時(shí)針方向旋轉(zhuǎn),因此在碰到障礙物之前,沿逆時(shí)針方向發(fā)射的光線比順時(shí)針光線的傳播距離稍遠(yuǎn)一些。
為了直觀演示這一現(xiàn)象,請(qǐng)觀看下方動(dòng)畫(請(qǐng)注意,旋轉(zhuǎn)運(yùn)動(dòng)又被夸大了一百億倍!)。
在第一個(gè)動(dòng)畫中,觀察者站在慣性(非加速)坐標(biāo)系中。雖然光線的傳播路徑都是直線,但是它們撞擊鏡子的時(shí)間卻不一樣。在第二個(gè)動(dòng)畫中,觀察者“乘坐”著宇宙飛船,可視為身處非慣性坐標(biāo)系中(嚴(yán)格來說,即使在旋轉(zhuǎn)坐標(biāo)系中,對(duì)向傳播的光線的運(yùn)動(dòng)速度也相同;任何坐標(biāo)系中光速均不變!)。
代入上文給出的幾何結(jié)構(gòu)參數(shù),方程 (1) 計(jì)算出兩束對(duì)向傳播光線之間的光程差為 8 × 10-16 米,即 0.8 飛米,約等于質(zhì)子的半徑;這個(gè)數(shù)值顯然很難測(cè)量!薩格納克干涉儀和環(huán)形激光陀螺儀通常不會(huì)直接給出光程長(zhǎng),而是報(bào)告頻率差或者拍頻 Δν,其公式為:
(2)

其中 ν(Hz)是光的頻率,L 是沿三角形周長(zhǎng)傳播的光的光程長(zhǎng)度。
注意,L 不一定是三角形的周長(zhǎng),因?yàn)橄到y(tǒng)中可能存在共用運(yùn)動(dòng)的介質(zhì),比如沿光束路徑、折射率不等于 1(n ≠ 1)的激光介質(zhì)。在本例中,假設(shè)鏡子和分光器之間為真空空間。則拍頻的數(shù)量級(jí)為 1 Hz,當(dāng)然比質(zhì)子半徑的距離容易測(cè)量得多。
該模型利用幾何光學(xué) 接口來追蹤薩格納克干涉儀幾何中的光線。兩個(gè)鏡子被施加了專門產(chǎn)生鏡面反射的鏡像 邊界條件。分光器采用了材料不連續(xù)性 邊界條件,用戶定義的反射比為 0.5,所以兩個(gè)對(duì)向傳播光束具有相同的強(qiáng)度。
我們還利用了旋轉(zhuǎn)域 特征使裝置旋轉(zhuǎn),如下圖所示:
所得繪圖顯示了鏡面光學(xué)系統(tǒng)中沿兩個(gè)方向傳播的光線,然而由于與光速相比,鏡子的移動(dòng)速度非常慢,所以我們很難將兩個(gè)路徑區(qū)分開。如果放大一百億左右,才能辨別出兩個(gè)隔著微小距離的三角形。
在下方繪圖中,拍頻是干涉儀角速度的函數(shù)。二者函數(shù)關(guān)系是線性的,符合方程 (1)–(2)。繪圖左下角出現(xiàn)了一些數(shù)值噪聲。這是數(shù)值精度造成的,在模型文檔中將解釋更多細(xì)節(jié)。
姿態(tài)探測(cè)應(yīng)用于航空航天導(dǎo)航
上文提到的薩格納克干涉儀和相關(guān)裝置——包括環(huán)形激光陀螺儀和光纖陀螺儀——都屬于慣性導(dǎo)航系統(tǒng)的現(xiàn)實(shí)應(yīng)用;慣性導(dǎo)航系統(tǒng)以一個(gè)已知位置為起點(diǎn),將平移速度和角速度隨時(shí)間的變化整合在一起,從而預(yù)測(cè)物體的位置和方向。現(xiàn)實(shí)中,慣性導(dǎo)航系統(tǒng)通常需要與以太空中其他物體為參照物的絕對(duì)位置和絕對(duì)方向測(cè)量相結(jié)合。絕對(duì)測(cè)量可以利用地球敏感器、太陽(yáng)敏感器或恒星敏感器;利用地球表面已知位置上的射頻信標(biāo);利用地球磁場(chǎng)測(cè)量;或者利用以上任意組合來完成。
平移速度和角速度的微小測(cè)量誤差會(huì)導(dǎo)致慣性導(dǎo)航系統(tǒng)隨時(shí)間推移變得越來越不穩(wěn)定。使用以上任意一種敏感器定期進(jìn)行絕對(duì)測(cè)量,有利于將不確定性限制在一個(gè)更合理的數(shù)值內(nèi)。下圖預(yù)測(cè)了不確定性隨時(shí)間的變化。
結(jié)論
我們成功地利用射線光學(xué)仿真演示了簡(jiǎn)單干涉儀內(nèi)的薩格納克效應(yīng)。只要所有活動(dòng)部件的速度遠(yuǎn)遠(yuǎn)小于光速,拍頻便符合基于廣義相對(duì)論的嚴(yán)密理論。薩格納克干涉儀或環(huán)形激光陀螺儀之內(nèi)的光程差的大小僅僅取決于對(duì)向傳播光束所圍住的面積,而非圓環(huán)的幾何結(jié)構(gòu)。
-
陀螺儀
+關(guān)注
關(guān)注
44文章
801瀏覽量
99394 -
飛行器
+關(guān)注
關(guān)注
13文章
731瀏覽量
45940
原文標(biāo)題:仿真為你揭秘飛行器陀螺儀的工作原理
文章出處:【微信號(hào):COMSOL-China,微信公眾號(hào):COMSOL】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
mems陀螺儀的特點(diǎn)和工作原理解析
陀螺儀的特性圖解及應(yīng)用
陀螺儀的工作原理及創(chuàng)新應(yīng)用
陀螺儀的基本組成及工作原理
陀螺儀工作原理以及不同種類陀螺儀之間的差異
分析三軸陀螺儀的工作原理及應(yīng)用
MEMS陀螺儀的驅(qū)動(dòng)和傳感及工作原理解析
光纖陀螺儀與旋轉(zhuǎn)式陀螺儀的工作原理解析
關(guān)于MEMS陀螺儀工作原理
微機(jī)械陀螺儀工作原理_微機(jī)械陀螺儀的應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論