 采用ARM處理器及嵌入式WinCE系統實現船用導航儀的設計
采用ARM處理器及嵌入式WinCE系統實現船用導航儀的設計
目前,隨著我國第十顆北斗衛星的成功發射,北斗區域衛星導航系統已完成基本系統建設。北斗衛星導航系統基本上能滿足測繪、漁業、交通運輸、氣象、電信、水利等行業,以及大眾用戶的應用需求。在加上北斗導航衛星定位系統的ICD的公布,那么對于北斗衛星導航儀的研究勢在必行,而我國的北斗導航衛星定位系統同時具備定位與通信功能、可同時解決“我在哪”和“你在哪”等應用優勢。但是實際的應用并不理想,主要表現在:1)民用領域應用不充分,未形成產業化的現狀;2)用戶終端設備價格偏高,在市場上無法與GPS系統形成競爭;3)用戶終端設備研制開發滯后,跟不上應用需求。北斗導航在民用領域有著廣泛的前景,但影響、制約北斗系統在民用領域獲得廣泛應用的主要因素就是系統用戶終端。而現有的導航儀基本上都是基于FPGA、DSP或者是兩者相結合為硬件平臺的GPS導航儀,也有比較先進GPS采用ARM作為處理器。在這樣的背景下,將ARM處理器運用到北斗衛星導航系統上,研制一種超強信號靈敏度、出眾的多路徑抑制能力及抗干擾/防欺騙能力;支持多頻點、多種升級配置超越主流高端產品;完全自主知識產權;從基帶芯片到導航解算完全自主研發,技術支持、產品維護、軟件升級、非標定制等均有保障;體積小、功耗低、性能可靠的終端接收機具有重要的意義。
1 系統總體設計方案
本系統的硬件平臺為三星公司的S3C2440A微處理器。S3C2440A的核心處理器(CPU)是一個由Advanced RISCMacllines有限公司設計的16/32為ARM920T的RISC處理器。ARM920T實現了MMU、AMBA、BUS及Harvard高速緩沖體系結構。這一結構具有獨立的16KB指令Cache和16KB數據Cache。每個都是由8字節的行組成。通過提供一整套完整的通用系統外設,S3C2440A減少整體系統成本和無需配置額外的組件。
北斗導航接收機主要由射頻前端、A/D轉換器、基帶信號處理和導航解算部分組成。射頻前端接收衛星的射頻信號,經前置放大器放大后,將信號下變頻為中頻信號;A/D轉換器采樣中頻信號,把模擬信號量化編碼為數字信號;基帶數字信號處理部分主要功能為;衛星信號的二維捕獲、載波相位和碼相位的跟蹤,并且測算出偽距;最后導航解算部分采用一定的算法消除模型誤差,求解偽距方程,解析出衛星接收機天線的地理位置,從而實現衛星定位。整體設計框圖如圖1所示。
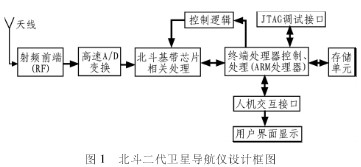
ARM處理器主要是負責對北斗基帶芯片數據的響應、處理和控制。北斗基帶芯片采用的是HwaNavchip-1芯片,可快速捕獲北斗系統B1和B3頻點的精密測距碼和北斗/GPS衛星的普通測距碼,具有較快的捕獲速度、極高的動態跟蹤范圍和測量精度。為降低開發難度,方便二次開發,系統采用的是“核心板+底板”的設計方案,這樣可以在核心板不變動的情況下,更改底板的功能組成,以使用不同的功能。同時,由于核心板采用多層PCB板設計,而底板采用雙層板即可,從而大大的降低了系統的成本。系統硬件設計原理框圖如圖2所示。

2 系統硬件電路設計
2.1 核心板電路構成
核心板采用ARM開發板最小系統設計,由S3C2440A處理器作CPU、內存SDRAM、閃存FLASH(NOR FLASH和NANDFLASH)、晶振電路、復位電路和啟動配置電路組成。
2.2 北斗基帶芯片處理模塊及電路
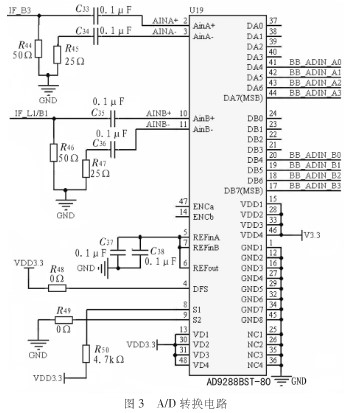
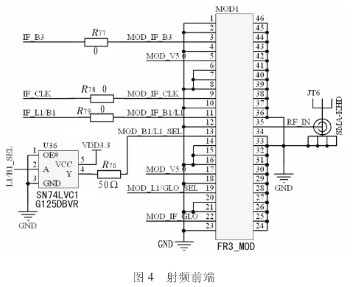
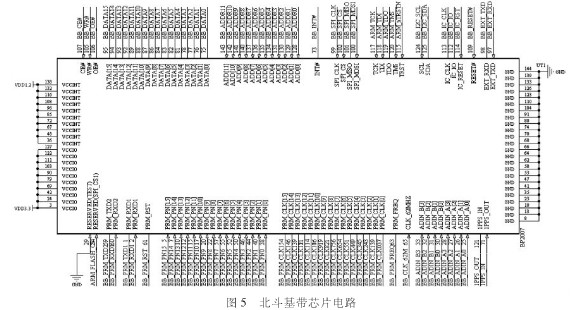
北斗基帶芯片采用的是HwaNavchip-1芯片,可快速捕獲北斗系統B1和B3頻點的精密測距碼和北斗/GPS衛星的普通測距碼,具有較快的捕獲速度、極高的動態跟蹤范圍和測量精度,通過串口輸出標準的二進制或NMEA-0183格式的信號,數據被傳送到解析程序進行驗證處理,計算出位置信息,并在液晶顯示器上進行顯示。這部分電路的主要工作原理和過程是將射頻信號經過下變頻成為模擬中頻信號再通過A/D轉換得到導航信號,這些信號經過基帶處理模塊和導航信息處理模塊捕獲、跟蹤、解算得到輸出的導航信息。A/D轉換和射頻前端電路分別如圖3、4所示,北斗基帶芯片部分電路如圖5所示。
2.3 底板硬件電路
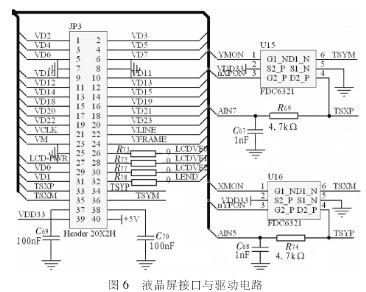
S3C2440A內置有液晶控制器,可以支持最大256 k色TFT彩色液晶屏、最大4 k色STN彩色液晶屏。彩色屏上帶有觸摸屏(為四線電阻式觸摸屏),用于檢測屏幕觸摸輸入信號,有利于提高人機交互的友好性。在使用的時候,需要一套切換控制及ADC轉換電路,用于切換觸摸屏的X、Y軸輸入,并進行A/D轉換。接口與觸摸屏驅動電路如圖6所示。
2.3.2 網絡接口電路
S3C2440A本身并沒有網絡接口,通過擴展網絡接口的模式可以為系統提供以太網接入,是本系統的一個重要的功能模塊,主要用于電子海圖更新以及相關數據上傳下載。該電路的核心芯片是DM9000E 10/100M以太網控制器,電路使用16位總線方式進行控制,數據總線DATA0~DATA15與SD0~SD15連接,地址線也進行相對應的連接,片選線nGCS3與芯片的AEN相連。模塊電路使用通用的網絡接口電路即可。
2.3.3 USB接口電路
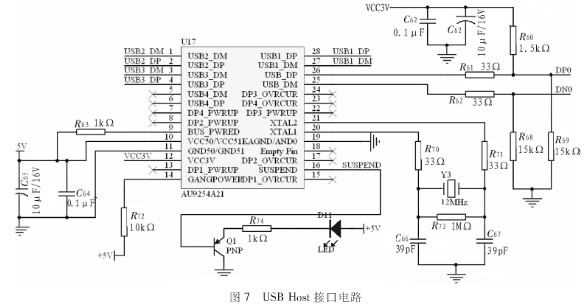
S3C2440A具2兩個USB Host控制器和1個USB Device控制器,本設計只使用了DN0、DP0引腳作為唯一的下行口,為此還設計了1個USB集線器電路.通過集線器可以方便對USB下行口進行擴展,USB集線器芯片采用的是MICRO公司的AU9254。用于電子海圖、導航定位軟件更新,導航數據下載保存等。電路連接如圖7所示。
2.3.4 RS-422接口電路
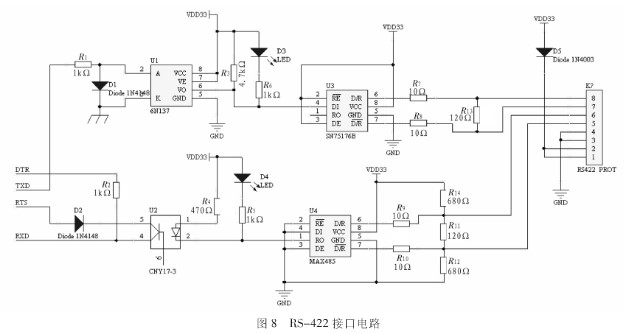
目前船舶駕駛臺導航設備均采用RS-422接口進行數據互聯,由于接收器采用高輸入阻抗和發送驅動器比RS-232更強的驅動能力,允許在相同傳輸線上連接多個接收節點,所以RS-422支持點對多的雙向通信,采用全雙工通信模式,差模傳輸,抗干擾能力強,能給ECDIS和雷達等導航設備提供實時北斗導航定位信息。電路如圖8所示。
2.3.5 電源電路
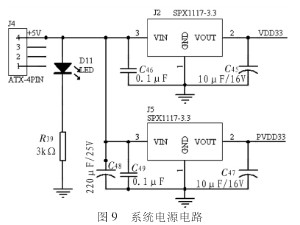
本系統使用的電源電路圖9所示,5 V的電源經過C46、C48和C49濾波后,由兩片低壓差電源芯片將電源轉換為穩定的3.3 V電源,分別給主板供電(電路圖中VDD33)和給核心板供電(電路圖中PVDD33)。
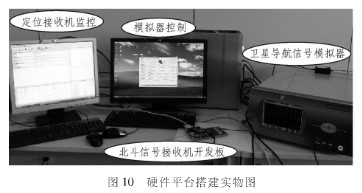
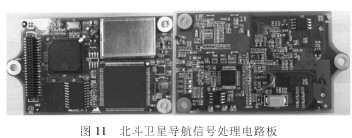
3 硬件調試環境搭建及測試
在提出設計方案的基礎上,通過實驗來初步論證設計方案的可行性,本設計的系統硬件平臺搭建結果實物圖如圖10所示,北斗衛星導航信號處理部分初步設計電路板如圖11所示。
4 結論
文中主要針對我國船用導航儀設計、應用完全自主方面考慮,采用處理能力強大的ARM處理器以及嵌入式WinCE作為系統的操作系統,以計算機技術為基礎、軟硬件可剪裁設計。從實驗結果可以看出,核心板加底板的設計方法能實現我國北斗船用導航儀功能,本系統使用S3C2440A進行嵌入式系統硬件平臺的搭建,為系統進一步開發做好了準備。這種設計方案也方便二次開發,只要更改底板設計即可實現不同領域的設計需求,降低了開發難度和成本,也縮短了開發周期。
-
處理器
+關注
關注
68文章
19548瀏覽量
231871 -
嵌入式
+關注
關注
5105文章
19288瀏覽量
310200 -
微處理器
+關注
關注
11文章
2317瀏覽量
83076
發布評論請先 登錄
相關推薦
基于ADAS嵌入式導航儀電路設計 —電路圖天天讀(40)

基于嵌入式ARM & WinCE 的小型監控系統的設計
基于北斗二代系統的嵌入式船用導航儀硬件設計

基于ADAS嵌入式導航儀電路設計詳解








 工商網監
工商網監
評論