

摘要:
在5G技術的背景下,對當前智能汽車自動駕駛的方向控制領域進行研究。現(xiàn)有智能車識別算法大多都依賴于中線誤差以控制智能汽車行駛,一旦應對無中線或者中線難以獲取的道路就束手無策。針對該現(xiàn)狀,對智能汽車隨動系統(tǒng)進行了魯棒性分析,在此基礎上提出了具體的模糊方向控制策略,并通過實驗驗證了該策略的優(yōu)勢。對智能汽車系統(tǒng)的分析、解決策略和實驗有利于對智能汽車系統(tǒng)進行改進。
?
0 引言
5G技術在近些年已經(jīng)獲得了較好的發(fā)展和應用。在智能駕駛領域,5G的大帶寬和低時延為實現(xiàn)無人駕駛汽車端到端控制需要處理的超大數(shù)據(jù)量提供了可能。近年來,無人駕駛汽車正以迅猛的速度發(fā)展,其涵蓋了工程控制、信息與通信、模式識別、傳感技術、電氣工程、計算機等多個學科,是當下智能交通的重要解決方案之一[1]。
在實際的實際道路環(huán)境中,智能汽車的控制端需要與傳感設備采集到的諸多信息進行大量的數(shù)據(jù)交換,并進行實時處理以得到控制輸出。
目前許多智能汽車道路識別算法都依賴于找到道路的實際中線,并根據(jù)其與理想中線的誤差來控制智能汽車方向。位置隨動系統(tǒng)是一個不具有精確數(shù)學模型的系統(tǒng),采用常規(guī)控制方法較復雜且效果不佳[2]。此外,隨著智能汽車的發(fā)展,智能汽車的道路類型越來越豐富,其中不少道路都是無中線或者中線難以獲取的,如:環(huán)島、十字、斜入十字等。依靠中線的算法將無法適應現(xiàn)有的道路。
1 系統(tǒng)軟件設計方案
1.1智能汽車系統(tǒng)魯棒性分析
智能汽車系統(tǒng)的處理流程如圖1所示,攝像頭采集模塊負責對圖像進行獲取,經(jīng)過圖像解壓縮、去燥等預處理之后傳送給圖像處理模塊進行道路類型識別,最后將結(jié)果輸出給執(zhí)行控制模塊進行車體控制。
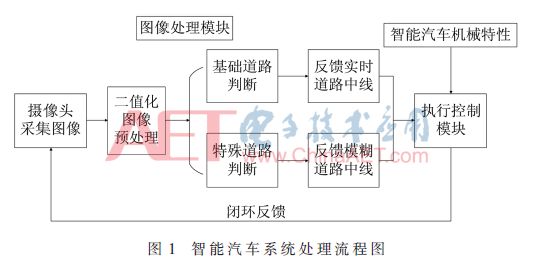
在傳統(tǒng)圖像處理中,常要求圖像處理模塊反饋精確的中線。在高速運行的智能汽車系統(tǒng)中,受限于采集設備和處理器的處理速度,通常無法對所有情況都進行處理和分析,這要求系統(tǒng)對處理信息進行一定的取舍[3]。在隨動系統(tǒng)中,圖像處理模塊并不需要每次都提供準確的道路中線,只需要向執(zhí)行控制模塊提供簡單靈活的、高速的位置和姿態(tài)反饋,主要有以下兩方面的原因。
(1)智能汽車的機械特性無法完全正確反映圖像處理的結(jié)果。智能汽車是一個實時控制的隨動系統(tǒng),系統(tǒng)通過改變舵機或者電機來控制智能汽車進行高速移動。由于車輛動力學中的某些參數(shù)(如前后輪的側(cè)偏剛度、車體轉(zhuǎn)動慣量、舵機和電機機械特性硬度)不斷變化,調(diào)速范圍有限,調(diào)節(jié)過程不平滑等特點,這必然也限制著智能汽車控制效果,誤差也始終伴隨著智能汽車整個行駛過程[4]。
(2)智能汽車閉環(huán)反饋算法能在一定時間內(nèi)消除反饋的瞬時抖動。閉環(huán)系統(tǒng)能根據(jù)控制對象輸出反饋來進行實時的校正,在測量出實際與計劃發(fā)生偏差時,可根據(jù)誤差量進行實時糾正。
在自動駕駛過程中,智能汽車對從接收傳感器監(jiān)測的路況信息到控制系統(tǒng)做出反應的時間越短,則自動駕駛的安全系數(shù)就越高。因此,對智能汽車控制器控制策略的優(yōu)化是有必要的,5G技術將使得車聯(lián)網(wǎng)系統(tǒng)的反應時間從秒級極大地提高至毫秒級。
1.2 模糊方向控制設計
本系統(tǒng)中包含的道路類型分為特殊道路類型和基礎道路類型。十字與斜入十字道路圖像如圖2所示。由于基礎道路類型中線清晰,較容易用傳統(tǒng)中線算法獲得,因此模糊方向控制主要針對特殊道路類型,其控制步驟如下:
(1)對圖像進行道路類型識別,判斷道路左右邊線巡線過程中是否出現(xiàn)跳變。
其中,xedge指圖像新的一行橫坐標xnew與其上一行橫坐標xold之間差值的絕對值,若該差值大于一定閾值th,則認為線過程出現(xiàn)跳變,發(fā)生跳變的行數(shù)為jy。經(jīng)過此步驟可初步認定道路為特殊道路類型。
(2)繼而針對不同特殊道路類型輔助判斷,即可識別出特殊道路的具體類型。輔助判斷的方式有很多,對十字道路而言可判斷左右邊線是否同時跳變,這可以通過中線尋跡算法獲得。以下就跳變行上是否存在一段長條狀白帶以判斷道路是否為十字道路類型。
其中,Colsmax為最大的列數(shù),Cth為左右邊界誤差冗余度,jy為發(fā)生跳變的行數(shù),二位數(shù)組image為圖像數(shù)據(jù),黑色點保存為數(shù)字“0”,白色點保存為數(shù)字“1”。若Index滿足:
則認為圖2中道路為十字道路類型的概率較大,可再進行下一步判斷以準確識別道路類型。
(3)判斷道路類型為十字后,針對十字道路類型,需要找的模糊中線可定義為十字類型上方道路重新找到邊線后的中線Centrecross,如圖2中星號標志所示。此外,可針對智能汽車行駛效果,更改模糊中線的大小。
其中,Centre為發(fā)送到執(zhí)行控制模塊的中線值,midth為中線調(diào)整范圍。在對特殊道路進行模糊控制后,智能汽車在經(jīng)過如十字、斜入十字、環(huán)島等特殊道路類型時,出現(xiàn)的抖動、車體偏移等減少明顯,下面設計了具體實驗以測試處理效果。
2 穩(wěn)定性測試結(jié)果分析
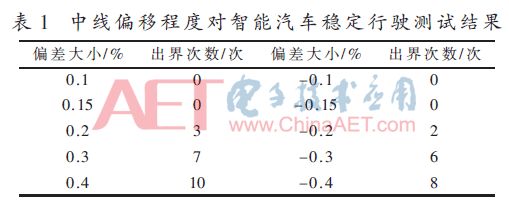
為了驗證多場穩(wěn)定圖像處理結(jié)果中出現(xiàn)誤差反饋對車輛行駛穩(wěn)定性的影響程度,本文設計了兩組重復平行實驗。本實驗的道路環(huán)境為:道路長度110 m,測試速度約為2.3 m/s,道路類型包含直道、彎道、十字道路、環(huán)島等。實驗中以中線偏移程度和沖出道路次數(shù)為主要指標。精確按照中線巡線算法得到的中線測試數(shù)據(jù)如表1所示,引入模糊中線控制后測試數(shù)據(jù)如表2所示。

具體測量方法是在圖像處理結(jié)果加入中線誤差反饋。這里反饋誤差設置不同等級的偏差程度α,計量方法為:
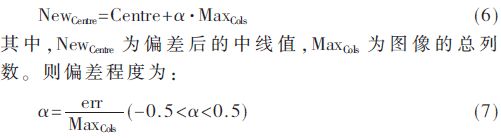
偏差程度α表示誤差大小占圖像總行數(shù)的比例,err為偏差量。改變偏差程度α的大小,在20次測試中,記錄智能汽車跑出道路之外的次數(shù)。測試結(jié)果見表1和表2。
從表1中可以看出,在智能汽車行駛過程中加入少量的誤差反饋并不會影響到智能汽車的穩(wěn)定行駛。這說明了智能汽車算法和機械特性的影響下,智能汽車對誤差反饋有一定容忍度。當偏差絕對值大于20%時,智能汽車行駛已經(jīng)出現(xiàn)較嚴重的抖動,這是因為智能汽車系統(tǒng)在當前機械結(jié)構和算法的基礎上已經(jīng)達到臨界穩(wěn)定狀態(tài)。改善智能汽車系統(tǒng)的結(jié)構,其特性或參數(shù)的允許擾動范圍也越大,其魯棒性也越好。
從表2可以看出,模糊中線控制有利于改善智能汽車系統(tǒng)誤差反饋的控制。在相同情況下,盡管智能汽車的中線反饋出現(xiàn)誤差,但是智能汽車系統(tǒng)還是能沿道路穩(wěn)定行駛。這是因為智能汽車識別算法提取的模糊中線不止反映了智能汽車行進的方向,還增大了智能汽車系統(tǒng)的“穩(wěn)定裕量”,在中線不精確或存在其他變化因素的條件下,使系統(tǒng)仍能保持預期的性能。此外,引入模糊中線后,智能汽車壓路肩的情況大大減少了,對智能汽車穩(wěn)定行駛有極大的幫助。
上述重復平行實驗表明,通過對特殊道路類型進行識別提取出模糊中線對提高智能汽車系統(tǒng)魯棒性和適應性具有明顯的優(yōu)勢。
3 結(jié)束語
本文分析了智能汽車算法和車體機械特性對智能汽車系統(tǒng)的影響,并通過實驗驗證了中線反饋偏移對智能汽車運行的影響。在此基礎上,針對現(xiàn)有依賴道路中線的算法的改進方法,使智能汽車穩(wěn)定、高速地在未知道路上行駛,給無人駕駛汽車系統(tǒng)實驗和自動控制、視覺計算算法的改進提出了可行的建議。此外,將該技術應用到無人駕駛領域,一個大帶寬、低延遲的網(wǎng)狀網(wǎng)絡是必不可少的。5G的10 Gb/s網(wǎng)絡傳輸速率、超高的連接數(shù)和高精度的定位能力使得它在自動駕駛領域表現(xiàn)出極大的潛力。
-
智能汽車
+關注
關注
30文章
2957瀏覽量
107952 -
5G技術
+關注
關注
8文章
533瀏覽量
18737
原文標題:【學術論文】智能汽車系統(tǒng)模糊方向控制的分析
文章出處:【微信號:ChinaAET,微信公眾號:電子技術應用ChinaAET】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論