

引言
小型機器人足球融合機械設計、自動控制、無線通信、圖像識別、智能體設計等多項技術,已成為機器人研究領域中的一個十分引人注目的熱點。機器人足球比賽系統是一個閉環控制系統,它一般由決策、機器人小車、視覺和無線通信四個子系統組成。其中,無線通信系統是銜接主機和底層機器人之間聯系的不可缺少的一環,其主要任務是將決策系統的控制命令實時準確地傳送給每個機器人,機器人按照決策系統的指令做出相應的動作,其通信性能好壞,將嚴重影響機器人的運動和比賽的順利進行。由于機器人足球比賽是一個動態、快速的實時系統,要求無線通信系統有較高的通信速率、穩定性和抗干擾性。另外,通信模塊的大小也要適應足球機器人小車小型化的要求。因而,開發出通信速率高、集成度好、可靠性高、抗干擾能力強的無線通信系統對于贏得比賽具有重要的意義。本文為提高通信系統的性能,設計開發了一種基于PTR6000的高速無線通信系統。
1 足球機器人無線通信機理及通信硬件的選用
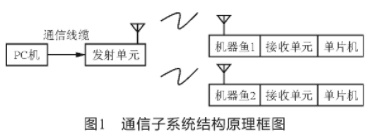
根據比賽規則,主機和機器人小車之間的通信采用無線方式,且兩支球隊的無線頻道不同。無線通信系統負責將主機決策機構形成的控制命令通過計算機控制串行數據輸出至無線發射器,經調制后發射出去,機器人小車上的接收模塊解調出無線信號上所載的命令信息,然后傳送給車載微處理器進一步處理,各機器人必須根據自身的程序去篩選屬于自己的命令信息。
作為無線通信的空中接口,通信芯片的選型會直接影響到系統通信的高效性和可靠性。根據本系統對無線通信裝置提出的頻率可選、通信速率高、性能可靠、體積小等要求,本系統選定挪威Nordic公司nRF2401芯片的PTR6000模塊作為無線數據收發模塊。其工作在全球開發的2.4 GHz ISM頻段,通信速率高達2 Mb/s,有125個頻道,滿足多頻及跳頻需要;另外半雙工無線收發一體,因而通信方式比較靈活;體積小,所需外圍元件少,接口電路簡單,因此特別適合于足球機器人小型化的要求;可直接連接單片機串口,也可接PC機RS 232串口,軟件編程非常方便;抗干擾能力強;功耗小。
2 無線通信系統硬件電路的設計
2.1 發射器的設計
在無線發射器中,核心部件采用了AT89LS52單片機和PTR6000的超高頻無線收發模塊,配合電平轉換電路及邏輯電路而成,其電路圖如圖1所示。從圖中可以看出,AT89LS52的RXD口接收來自PC機的數據信號,通過對PTR6000的初始化,使它工作在發射狀態,ShockBurst模式定義數據包格式,同時通過CE,CLK和DATA三線接口將數據發射出去,實現數據的發送。
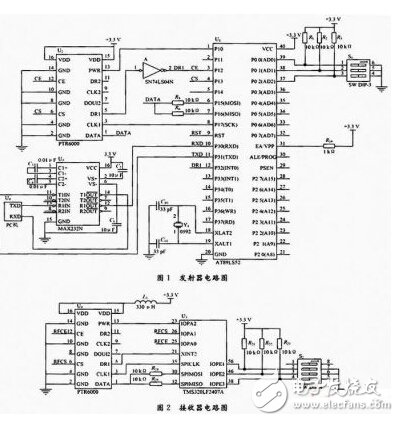
由于PC機串口采用RS 232電平,而無線通信模塊PTR6000以及單片機AT89LS52均使用TTL/CMOS電平,所以要進行電平轉換。本系統中采用MAX232芯片,它是一種電平轉換芯片,可以將TTL轉換為RS 232,或將RS 232轉換為TTL,能滿足單片機或普通計算機的通信電平轉換要求
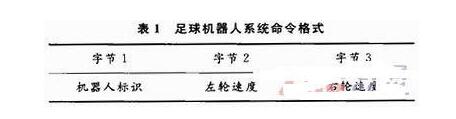
2.2 接收器的設計
接收器電路圖如圖2所示。接收端裝在每個機器人小車上,由于機器人小車的控制采用DSP控制器TMS320LF2407A,因而在接收端PTR6000無線通信模塊就采用TMS320LF2407A來控制。因PTR6000模塊與單片機采用的電平標準同為TTL/CMOS電平,所以在接收端直接將兩者連接。上電以后TMS320LF2407A首先配置PTR6000模塊,先將CS,CE設為配置模式,TMS320LF2407A通過PTR6000的CLKI,DATA將120 b配置數據移入PTR6 000模塊,完成無線模塊寄存器配置后,由TMS320LF2407A控制CS,CE啟動接收模式。當接收數據的地址與本機地址一致時,通過DRI輸出中斷指示(高電平有效),DSP通過DATA,CLKI接收數據。
另外,在本系統設計中增加了跳頻撥碼開關,與之對應的發射電路也設置了跳頻撥碼開關,通過調整撥碼開關的位置輸入不同的電平組合信號便可由軟件跳轉到相應頻道,以適應比賽時更換頻率的需要。
3 無線通信系統軟件設計
3.1 無線通信方式與協議
由于足球機器人的活動空間有限,通常采用單向通信方式。為了實現一對多的通信,采用廣播方式,所有的機器人采用與發射器相同的通信頻率。每個控制周期無線發射器發射一幀數據給本方所有機器人,各機器人根據自身編號讀取數據幀的不同字段,獲得自己的運動控制指令。
本系統的足球機器人采用兩輪差動方式驅動,因此,機器人的運動控制指令就是該機器人的左右輪速度設定值。足球機器人系統命令格式如表1所示。賽場上的機器人小車首先接收機器人標識字節,并與自身的標志相比較。當比較匹配時,則認定后面的2個字節是發送給本機的指令,準備接收;否則,屏蔽掉后面的2個字節的指令,等待下一組的指令信息。
3.2 收發器的軟件設計
通信系統的軟件主要有兩部分:一是AT89LS52上的從RS 232接收和往PTR6000發射數據;二是DSP2407A從PTR6000接收數據。圖3給出它們的流程框圖。
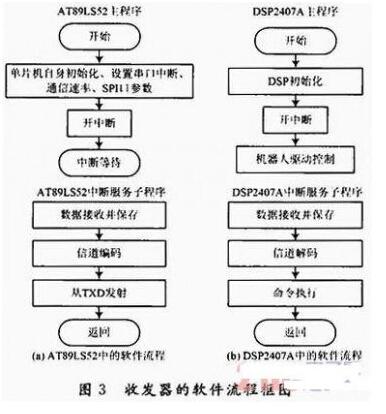
發射器中的單片機AT89LS52接收到上位機的通信指令后,將接收到的數據按照通信協議打包,然后通過對CLK1引腳和DATA引腳編程按照數據手冊上的時序圖將數據按位寫入PTR6000并以廣播形式發送給各個足球機器人。
足球機器人的接收程序則由機器人上的DSP2407A執行,每個機器人根據各自設定的編號,從接收緩沖區取出相應左右輪速度值。接收端的PTR6000在收到與本機地址相同的數據包后將DR1數據就緒引腳置為高電平,由于本設計將此引腳連接到了DSP的XINT2中斷引腳,因此DR1的上升沿將導致DSP轉入執行中斷服務程序,通過對CLK1和DATA引腳編程以數據手冊提供的時序讀取接收數據。
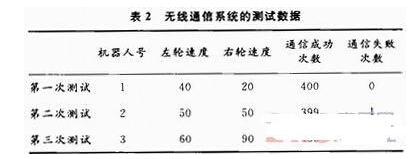
4 實驗數據與結果分析
為了測試無線通信子系統的效果。這里做了實驗,從發射器發送相同次數(400次)的數據,記錄機器人接收到數據正確(通信成功)和錯誤(通信失敗)的次數。實驗結果如表2所示,可以看出,通信成功率很高,可靠性很好。
5 結語
本文詳細介紹了基于PTR6000通信模塊所開發的足球機器人無線通信子系統的設計與實現。實驗證明,本設計使機器人小車系統在精度和運行性能方面得到很大提高,可以滿足足球機器人對速度、可靠性及抗干擾能力的要求。
-
機器人
+關注
關注
212文章
29104瀏覽量
210479 -
無線
+關注
關注
31文章
5504瀏覽量
174708 -
通信模塊
+關注
關注
2文章
158瀏覽量
33316
發布評論請先 登錄
相關推薦
無線收發數傳MODEM模塊PTR2000的特點、引腳功能與應用介紹

無線通信模塊
無線通信模塊
無線通信模塊
無線收發數傳MODEM模塊PTR2000的原理與應用
基于PTR2000的單片機近程無線控制系統
基于PTR2000技術的短距離無線數據傳輸系統
無線收發數傳MODEM模塊PTR2030及其應用
基于無線收發數傳模塊PTR2030的溫度測控系統設計
單片機和PTR2000實現短距離無線通信方案

基于PTR2030無線收發模塊實現多仿生機器魚通信子系統的應用方案





 工商網監
工商網監

評論