

移動自組網(wǎng)( MANET) 是由一組帶有無線收發(fā)裝置的移動終端組成的一個多跳的臨時性自治系統(tǒng),它的每個節(jié)點在網(wǎng)絡(luò)中隨機地移動,通過無線連接組成任意的網(wǎng)絡(luò)拓撲結(jié)構(gòu)。在移動自組網(wǎng)中進行拓撲發(fā)現(xiàn),對提高移動自主且網(wǎng)路由策略。QoS和功率控制等性能具有重要意義。由于節(jié)點的移動性、無線通信等特點,網(wǎng)絡(luò)拓撲處于動態(tài)變化中,這種拓撲動態(tài)變化的特點使得源節(jié)點和目的節(jié)點間的有效通信變得困難,也為設(shè)計可靠快速的拓撲發(fā)現(xiàn)策略提出了一系列的問題。
人控移動設(shè)備構(gòu)建的自組網(wǎng)環(huán)境下,真實的移動模型應(yīng)當(dāng)體現(xiàn)節(jié)點的社會性[3].因為,現(xiàn)實場景中的移動設(shè)備通常由人攜帶或控制,而人作為一種社會存在物,其交往活動受個體的意識、需要、社會行為等影響,具有交往社會性,社會性是節(jié)點移動的一個重要特性[3,6].但目前自組網(wǎng)研究只是根據(jù)現(xiàn)實場景下移動設(shè)備軌跡獲取的一些移動特征[3,6],缺乏表征節(jié)點社會性的參數(shù)。
因此,本文通過分析現(xiàn)實場景下節(jié)點的移動軌跡,得到移動軌跡的鏈路持續(xù)時間分布和熟悉度-頻繁度的特征,并從社會學(xué)角度,對兩種分布特征產(chǎn)生的原因進行了深入的分析,證明了兩種分布特征可體現(xiàn)現(xiàn)實場景中節(jié)點移動的社會性和節(jié)點組織關(guān)系的社會性。這對社會網(wǎng)絡(luò)環(huán)境下自組網(wǎng)的仿真研究和應(yīng)用具有重要意義。
1 節(jié)點移動特征的實驗分析
本文選用著名的Haggle項目所采集的3個不同現(xiàn)實場景下節(jié)點的移動軌跡,來分析節(jié)點的移動特征。
1.1 移動數(shù)據(jù)集
RAWDAD組織提供的Haggle項目的3個數(shù)據(jù)集,分別在Intel研究合作實驗室、劍橋大學(xué)的計算機實驗室、Grand Hyatt Miami的IEEE會議環(huán)境下采集人攜帶無線設(shè)備的移動數(shù)據(jù)。為方便起見,3個數(shù)據(jù)集分別簡稱為Intel、Cambridge和Infocom05.實驗所用的無線設(shè)備分為iMote設(shè)備和外部設(shè)備兩種,采集了攜帶iMote設(shè)備節(jié)點之間、攜帶iMote設(shè)備節(jié)點與攜帶外部設(shè)備節(jié)點之間在彼此通信覆蓋范圍內(nèi)的鏈路持續(xù)時間,而沒有采集攜帶外部設(shè)備節(jié)點之間的鏈路持續(xù)時間。為了提高實驗分析結(jié)果的有效性和正確性,只考慮攜帶iMote設(shè)備節(jié)點之間的鏈路持續(xù)時間數(shù)據(jù)。
為分析現(xiàn)實場景與仿真模型的移動特征差異,選擇目前廣泛采用的隨機路點模型RWP(Random Waypoint Model)[8]和參考點組移動模型RPGM(Reference Point Group Model)[9].RWP的參數(shù)設(shè)置同參考文獻[3],100個節(jié)點在5 000 m×5 000 m的區(qū)域內(nèi)運動,通信半徑為250 m,仿真時間為24 h,節(jié)點運動最小速度和最大速度分別為1 m/s、6 m/s,最小暫停時間和最大暫停時間分別為1 s、10 s.在RPGM中,節(jié)點共分10組,其余參數(shù)設(shè)置同RWP.多組實驗結(jié)果顯示置信度達90%以上。
1.2 實驗分析方法
從鏈路持續(xù)時間的互補累積分布CCDF(Complemen-tary Cumulative Distribution Function)和熟悉度-頻繁度兩方面來考察移動軌跡特征。
采用互補累積分布的優(yōu)點在于它考慮到所有的原始數(shù)據(jù),避免了用直方圖繪圖時落入同一直方內(nèi)的數(shù)據(jù)值差異的缺陷,同時也控制了尾部噪音。
鏈路持續(xù)時間的互補累積分布p(T)用來反映數(shù)據(jù)集中兩個節(jié)點間鏈路持續(xù)時間取值大于某個常數(shù)T的概率。
定義2 熟悉度-頻繁度:以數(shù)據(jù)集中節(jié)點j與節(jié)點k直接通信的次數(shù)fj,k表示節(jié)點間的通信頻度。節(jié)點j與節(jié)點k在fj,k次直接通信中鏈路持續(xù)時間的累加和表示兩節(jié)點的親密度,和值越大,親密度越高,也表明兩個節(jié)點的社會關(guān)系越緊密。為了研究節(jié)點間的組織關(guān)系特征,計算數(shù)據(jù)集中所有節(jié)點對的親密度和通信頻度,畫散點圖,用x軸表示親密度,y軸表示通信頻度,便得到節(jié)點間的熟悉度-頻繁度,如圖1所示。
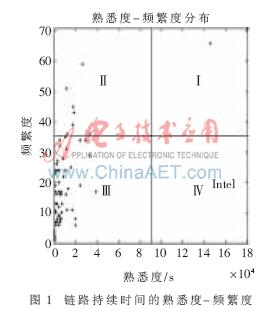
根據(jù)格拉諾維特1973年在《美國社會學(xué)雜志》上發(fā)表的論文中對強弱關(guān)系的定義[11],將熟悉度-頻繁度中節(jié)點間的組織關(guān)系分為四類:社團關(guān)系、熟悉的陌生人關(guān)系、陌生人關(guān)系、朋友關(guān)系(為簡便起見,將四類關(guān)系依次記為I、II、III和IV)。社團關(guān)系的節(jié)點對親密度高,通信頻繁度多;陌生人關(guān)系的節(jié)點對親密度低,通信頻繁度少;熟悉的陌生人關(guān)系的節(jié)點對親密度低,通信頻繁度多;朋友關(guān)系的節(jié)點對親密度高,通信頻繁度少。陌生人關(guān)系稱為弱關(guān)系,其他三類統(tǒng)稱為強關(guān)系。
1.3 實驗結(jié)果
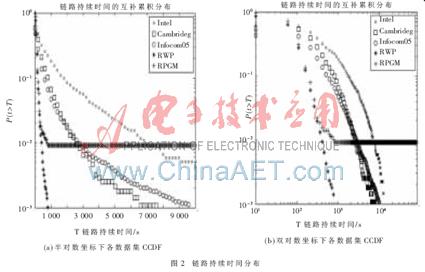
計算各數(shù)據(jù)集的鏈路持續(xù)時間的CCDF,如圖2(a)和圖2(b)所示,實際數(shù)據(jù)集的鏈路持續(xù)時間分布曲線在雙對數(shù)坐標(biāo)下基本為直線形式,具有冪律特征,表明較長的鏈路持續(xù)時間比例極小,較短的鏈路持續(xù)時間比例很大。數(shù)據(jù)集中節(jié)點間鏈路持續(xù)時間取值所占百分比如表1所示。RWP服從指數(shù)分布,其分布曲線在半對數(shù)坐標(biāo)下表現(xiàn)為一條直線。仿真模型RWP和RPGM與實際數(shù)據(jù)集的鏈路持續(xù)時間CCDF有顯著不同。
由各數(shù)據(jù)集中節(jié)點的熟悉度-頻繁度可以看出,實際數(shù)據(jù)集中屬于弱關(guān)系的節(jié)點對分布密集,所占比例很大,分別為97.95%、98.72%、99.2%,而處于強關(guān)系的節(jié)點對比例很少,分別為2.05%、1.28%、0.8%,約占1%~3%,即實際場景中絕大多數(shù)節(jié)點為弱關(guān)系,極少數(shù)節(jié)點為強關(guān)系。兩種仿真模型中屬于強關(guān)系的節(jié)點對比例很大,分別為33.66%、79.41%.仿真模型RWP和RPGM與實際數(shù)據(jù)集的熟悉度-頻繁度特征差異顯著。
為分析節(jié)點組織關(guān)系特征與時間的關(guān)系,考察實際數(shù)據(jù)集中不同采樣時間長度內(nèi)的節(jié)點熟悉度-頻繁度。由于3個實際數(shù)據(jù)集的熟悉度-頻繁度具有相同特性,不妨以Infocom05數(shù)據(jù)集為例,取時間長度分別為100 000 s、150 000 s、200 000 s、250 000 s,得到節(jié)點的熟悉度-頻繁度,如圖3所示。可以看出,不同統(tǒng)計時間內(nèi)四類關(guān)系節(jié)點的比例基本維持不變,弱關(guān)系節(jié)點分布密集,強關(guān)系節(jié)點比例很少。
作為對比,本文還分析了仿真模型RWP下不同采樣時間長度內(nèi)的節(jié)點熟悉度-頻繁度。可以看出,RWP中四類關(guān)系節(jié)點的比例隨時間變化。這說明仿真模型RWP與現(xiàn)實場景的熟悉度-頻繁度有很大差異。
2 實驗結(jié)果對社會性詮釋
2.1 節(jié)點移動的社會性
著名經(jīng)濟學(xué)家帕累托(Pareto)發(fā)現(xiàn)了二八定律,指出20%的人口擁有社會上80%的財富。后來人們發(fā)現(xiàn),二八定律所反應(yīng)的現(xiàn)象普遍存在于自然界和人類社會生活的各個方面[12].
根據(jù)參考文獻[12],在人類的交往活動中,20%的人占據(jù)了交往時間的80%,而80%的人只占據(jù)了交往時間的20%.著名復(fù)雜網(wǎng)絡(luò)研究者艾伯特-拉斯洛·巴拉巴西指出,只要二八定律成立,就能說其中蘊含冪律,冪律是用數(shù)學(xué)公式表明了少數(shù)幾個大事件承載了大多數(shù)的活動[13].可見,人的交往活動現(xiàn)象蘊含冪律,這種冪律特征對移動自組網(wǎng)中人控移動節(jié)點的移動行為的影響表現(xiàn)為少數(shù)節(jié)點長時間在彼此的通信覆蓋范圍內(nèi)移動,大量節(jié)點很少移動到彼此的通信覆蓋范圍內(nèi)。若用鏈路持續(xù)時間表示節(jié)點在彼此的通信覆蓋范圍內(nèi)移動,那么正是這種滿足二八定律的社會性,使得在分析采集的移動軌跡時,得到鏈路時間分布具有冪律分布特征。由此說明,鏈路持續(xù)時間的冪律分布特征體現(xiàn)了一定社會環(huán)境下節(jié)點移動的社會性。
如前所述,仿真模型RWP和RPGM與實際數(shù)據(jù)集的通信持續(xù)時間CCDF有顯著不同。這是因為,在RWP中,節(jié)點獨立、隨機地選擇運動方式和狀態(tài),一個節(jié)點與其他每個節(jié)點在彼此通信覆蓋范圍內(nèi)的概率相同,節(jié)點的鏈路持續(xù)時間取值較集中,大多在某一均值附近波動,這不符合冪律分布特性;而在RPGM中,各組中心點的運動是隨機獨立的,整組的運動與RWP中單個節(jié)點的運動方式一樣,因此RPGM中節(jié)點的鏈路持續(xù)時間也不符合冪律分布特性。可見,從鏈路持續(xù)時間來看,RWP和RPGM都沒有很好地描述現(xiàn)實場景中節(jié)點的社會性特征。鏈路持續(xù)時間的分布特征可有效地衡量現(xiàn)實場景和仿真模型中節(jié)點移動特征的差異。
2.2 熟悉度-頻繁度特征體現(xiàn)節(jié)點組織關(guān)系的社會性
2.2.1 四類關(guān)系節(jié)點的比例差異
社會學(xué)家發(fā)現(xiàn),現(xiàn)實社會中,組織關(guān)系的社會性表現(xiàn)為人們之間處于不同的組織和社會關(guān)系,不同親密程度的關(guān)系所占比例符合一定的規(guī)律,并且這種社會關(guān)系在一段很長的時間內(nèi)保持穩(wěn)定[14-16].這在現(xiàn)實場景中表現(xiàn)為,少數(shù)個體關(guān)系親密,碰面次數(shù)較多,接觸時間長,而大部分個體碰面次數(shù)少,接觸時間短,甚至從不來往。換言之,現(xiàn)實場景中絕大多數(shù)節(jié)點為弱關(guān)系,極少數(shù)節(jié)點為強關(guān)系。所以,屬于弱關(guān)系的節(jié)點對分布密集,所占比例很大,而處于強關(guān)系的節(jié)點對比例很少。這與實驗所得結(jié)論一致。真實場景下4類關(guān)系節(jié)點比例與仿真模型RWP和RPGM有顯著不同。這是因為,在RWP中,節(jié)點之間獨立無關(guān),與現(xiàn)實場景中節(jié)點分屬不同的組織關(guān)系有較大差異;在RPGM中,每個節(jié)點預(yù)先分配歸屬為某個組,且組織關(guān)系在整個仿真時間不變,而處于一定社會關(guān)系中的人因自身興趣或交流需要,在不同時期處于不同的組或群體中,即RPGM的節(jié)點組織關(guān)系比例與現(xiàn)實場景有很大不同。由此表明,熟悉度-頻繁度中不同關(guān)系節(jié)點的比例差異能用來衡量移動模型中節(jié)點移動特征的差異。
2.2.2 節(jié)點組織關(guān)系的時間無關(guān)性
在社會學(xué)理論中,社會網(wǎng)成員之間的關(guān)系保持不變的性質(zhì)就是社會網(wǎng)的持久性連接的持久性,個人社會網(wǎng)的連接關(guān)系很強, 相對而言網(wǎng)絡(luò)成員間的關(guān)系較持久和穩(wěn)定[17],即現(xiàn)實社會中人的組織關(guān)系在一段時期內(nèi)相對穩(wěn)定。也就是說,現(xiàn)實場景下,熟悉度-頻繁度中節(jié)點四類關(guān)系的比例基本保持不變,這與實驗(如圖3所示)結(jié)論一致。
而RWP和RPGM沒有此種特性。因為隨機移動模型中,一個節(jié)點與其他每個節(jié)點在彼此通信覆蓋范圍內(nèi)的概率相同,所以仿真時間越長,一個節(jié)點與其他每個節(jié)點直接通信的次數(shù)越多,節(jié)點間的總通信持續(xù)時間就會越長,所以RWP中節(jié)點熟悉度-頻繁度會向上和向右偏移。隨仿真時間延長,III類節(jié)點比例減少,I類、II類和IV類比例相應(yīng)增加。RPGM的熟悉度-頻繁度情況與RWP類似,RPGM中組內(nèi)節(jié)點關(guān)系不變,整組的運動與RWP中單個節(jié)點的運動方式一樣,都為完全隨機移動。
現(xiàn)實場景中節(jié)點的熟悉度-頻繁度的特征很好地體現(xiàn)了一定社會環(huán)境下人的組織關(guān)系特性,且這種特性在一段時間內(nèi)相對穩(wěn)定。而RWP、RPGM與實際數(shù)據(jù)集的熟悉度-頻繁度差異很大,熟悉度-頻繁度的時間無關(guān)性特征可有效地衡量實際場景與仿真模型中節(jié)點移動特征的差異。
現(xiàn)實場景中移動終端通常由人攜帶或控制,而人因自身興趣或交流合作的需要移動并與其他個體關(guān)聯(lián)。本文依據(jù)社會學(xué)知識,說明了現(xiàn)實移動場景的社會性體現(xiàn)在節(jié)點移動的社會性和節(jié)點間組織關(guān)系的社會性,提出真實場景下移動軌跡的鏈路持續(xù)時間的冪律分布特征和熟悉度-頻繁度特征體現(xiàn)了一定社會環(huán)境下節(jié)點的社會性,并通過實驗證明了兩種分布特征可以衡量移動模型節(jié)點移動特征的差異。因此,研究基于人控移動設(shè)備構(gòu)建的自組網(wǎng)設(shè)計移動模型時,可從鏈路持續(xù)時間分布和熟悉度-頻繁度來考察移動模型的節(jié)點移動和組織關(guān)系的社會性。
:
-
拓撲
+關(guān)注
關(guān)注
4文章
345瀏覽量
29821 -
無線
+關(guān)注
關(guān)注
31文章
5500瀏覽量
174646 -
無線通信
+關(guān)注
關(guān)注
58文章
4666瀏覽量
144537
發(fā)布評論請先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論