

引言
視頻監(jiān)控系統(tǒng)在各行業(yè)重點部門或重要場所進行實時監(jiān)控的過程中發(fā)揮著重要的作用。
管理部門可通過其獲取圖像或聲音等有效信息,并對突發(fā)性異常事件的過程進行實時監(jiān)視和記錄,以幫助現(xiàn)場取證和及時布置警力處理案件。
隨著互聯(lián)網(wǎng)的普及、計算機、圖像處理、傳輸技術(shù)的飛速發(fā)展, 視頻監(jiān)控技術(shù)也有長足的發(fā)展。高智能、高效率、高安全性的視頻監(jiān)控系統(tǒng)已經(jīng)成為國內(nèi)外發(fā)展的必然趨勢。
目前,針對視頻監(jiān)控系統(tǒng)的研究主要集中在數(shù)據(jù)傳輸和終端顯示上。文獻利用GPRS對公共照明視頻監(jiān)控系統(tǒng)捕獲到的數(shù)據(jù)進行傳輸并在終端進行顯示。文獻設計了一種具有自組織跳轉(zhuǎn)數(shù)據(jù)傳輸功能的無線監(jiān)控系統(tǒng)。文獻提出了一種基于ZigBee 無線通信技術(shù)的設備監(jiān)控系統(tǒng)。然而現(xiàn)有視頻監(jiān)控系統(tǒng)的終端僅依靠工作人員頻繁切換監(jiān)控畫面對現(xiàn)場進行監(jiān)控,這不僅降低了監(jiān)控系統(tǒng)的工作效率,而且使未被切換到的畫面成為監(jiān)控盲區(qū),此外,現(xiàn)有監(jiān)控系統(tǒng)很少具備自動報警功能,這也是視頻監(jiān)控系統(tǒng)需要重點研究的方向。
本文基于無線傳感網(wǎng)絡定位技術(shù),設計一個人群異常活動視頻監(jiān)控系統(tǒng)。該系統(tǒng)能夠?qū)θ藛T的活動位置進行較精確的定位,當出現(xiàn)異常活動時,自動觸發(fā)報警功能,系統(tǒng)工作人員只需要在接到報警信息后處理現(xiàn)場,從而提高系統(tǒng)的工作效率。本文從系統(tǒng)關(guān)鍵技術(shù)與難點問題入手,首先針對接收信號強度指示和距離的理想狀態(tài)關(guān)系模型在實際應用中存在的問題,通過設計實驗,獲取大量數(shù)據(jù),并對其采用曲線擬合技術(shù)得到接收信號強度指示和距離的關(guān)系。然后針對傳感器節(jié)點位置信息因受節(jié)點供電不穩(wěn)定等因素影響而產(chǎn)生噪聲數(shù)據(jù)的問題,設計了一種基于期望值和閾值的濾波技術(shù)過濾噪聲數(shù)據(jù)。其次,提出了非安全域的設計思路,系統(tǒng)若發(fā)現(xiàn)被監(jiān)控人員出現(xiàn)在非安全域,則自動觸發(fā)報警。最后,設計并實現(xiàn)了一個原型系統(tǒng),包括底層傳感器節(jié)點硬件編程、中間層消息處理和上層數(shù)據(jù)處理等模塊。
1 系統(tǒng)關(guān)鍵技術(shù)與難點問題
1.1 獲取 RSSI 和距離值的對應關(guān)系
接收信號強度指示(RSSI,Received Signal Strength Indicator)通過信號在傳播過程中的衰減來估計節(jié)點之間的距離[8]。由于信號在傳播過程中信號強度會降低,根據(jù)接收機接收到的信號強度,可以估計發(fā)射機的距離。無線信道的數(shù)學模型如式(1)。

式(1)中,d 是發(fā)射機和接收機之間的距離, d0 是參考距離; np 是信道衰減指數(shù);一般取值2-4; p0 是距離發(fā)射機d 0 處的信號強度;P(d)是距離發(fā)射機d 處的信號強度; p0 可以通過經(jīng)驗得出,或者從硬件規(guī)范定義得到。由此方程可以通過信號強度P(d)求出d 。
然而,信道因受到多徑衰減(Multi-path Fading)和非視距阻擋(Non-of-Sight Blockage)的影響而具有時變性,在特定環(huán)境中,嚴重偏離上述模型,通過接收到的信號強度估計出的距離d 有很大的誤差。
因此,理想狀態(tài)下RSSI 值和距離的關(guān)系不適用本系統(tǒng)。本文必須找到RSSI 值和距離在實驗環(huán)境下的函數(shù)關(guān)系,這是本文所作工作的一個重點也是難點。通過研究分析,本文設計了獲取RSSI 和距離在實驗環(huán)境下關(guān)系的實驗,實驗方案如圖1 所示。
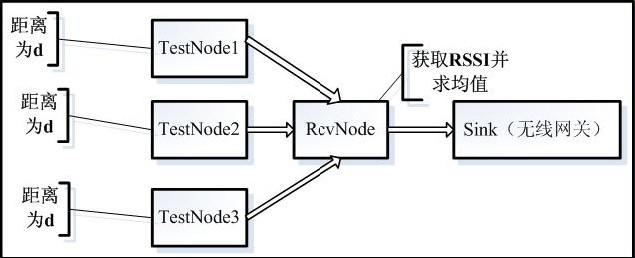
圖1 RSSI 和距離關(guān)系獲取實驗方案
距離為d 時,三個TestNode 節(jié)點分別向RevNode 發(fā)送40 個數(shù)據(jù)包,RecvNode 節(jié)點提取出接收到的120 個數(shù)據(jù)包中的RSSI 值并求其平均值,如此實驗重復10 次,再對所有平均值求均值,如圖2 所示。
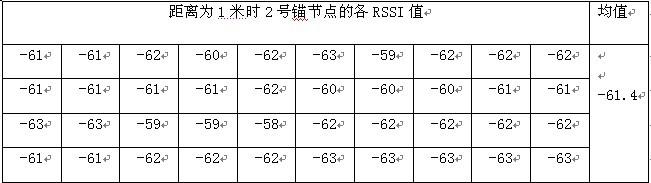
圖2 距離為1米時2號錨節(jié)點的RSSI值
由此易知,每個距離d 就對應著一個RSSI 均值,對所有數(shù)據(jù)匯總后,得到如下RSSI和距離之間的關(guān)系如圖3 所示。

圖3 距離和RSSI之間的關(guān)系
1.2 曲線擬合
本文利用曲線擬合中的指數(shù)擬合和多項式擬合的辦法找函數(shù)關(guān)系。通過一系列實驗并計較得到三次多項式擬合效果最好。擬合得到的函數(shù)表達式如式2 所示。

圖4 所示為三次多項式與指數(shù)擬合得到的距離與RSSI 關(guān)系對比圖,從圖中可以明顯看出,利用三次多項式擬合出來的曲線和實際情況更吻合。
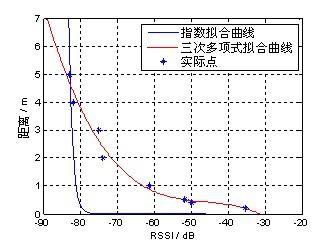
圖4 三次多項式與指數(shù)擬合得到的距離與RSSI 關(guān)系對比
1.3 校正處理
無線傳感器節(jié)點因受環(huán)境因素較大,故在用接收到的RSSI 值進行計算前因先進行RSSI值校正處理。首先,設定RSSI 取值的最小和最大臨界值,當實驗測量到的RSSI 值遠遠小于最小臨界值則令其等于最小臨界值,或者RSSI 遠遠大于最大臨界值時則令其等于最大臨界值,如果RSSI 和臨界值相差不大,則根據(jù)從實驗過程中得到的經(jīng)驗對該RSSI 值進行適當校正,使該RSSI 值回到臨界區(qū)域內(nèi)部。
1.4 濾波
第一步:設定RSSI 的期望值,如式(3)式所示:

其中, R0 是預期的RSSI 值,R 是實際得到的RSSI 值, R1 是前一次得到的RSSI 值,R2是在此之前的第二次得到的RSSI 值,α、β、γ 分別是R, R1 , R2 在期望值中所占的權(quán)重,分別將其設置為0.6,0.25,0.15。
第二步:設定閾值,閾值是在大量實驗基礎上進行總結(jié)再設定的,該系統(tǒng)中設為0.5。
第三步:除噪,若期望值0 R 和當前值R 差的絕對值小于設定的閾值,就讓令上一次的值作為當前值,R= 1 R ,同時2 R = 1 R;若期望值和當前值差的絕對值已經(jīng)大于閾值,則令期望值作為當前值,R= R0 ,同時, R2 = R1 , R1 = R0 ;實驗結(jié)果表明:通過以上濾波處理,不僅減小了節(jié)點不穩(wěn)定帶來的軌跡震蕩,節(jié)點的軌跡變化曲線更加趨于平緩。
1.5 串口數(shù)據(jù)提取
在串口通信協(xié)議中一個串口通信數(shù)據(jù)幀的格式如圖5所示:

圖5 串口通信數(shù)據(jù)幀的格式
Sync 是一個數(shù)據(jù)幀的起始和結(jié)束標志符,用0x7E 來表示該標志符。緊跟在起始Sync后面的是Type標志符。CRC用來表示冗余校驗碼,其中,參與冗余校驗的字段為TOS MsgHeader 和Payload,這兩個字段存放的是網(wǎng)關(guān)收到的一個傳感器節(jié)點發(fā)出的完整的路由包。
最后面的一個Sync 用來表示幀的結(jié)束。
在實驗過程中,串口接收到的原始數(shù)據(jù)如圖6 所示:
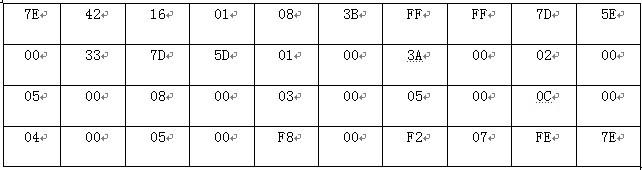
圖6 串口原始數(shù)據(jù)
通過對上表中數(shù)據(jù)分析得知:表中第一條數(shù)據(jù)中0x7E 表示一個數(shù)據(jù)幀的起始,0x42 表示一個數(shù)據(jù)幀的Type,不要求接收方對發(fā)送方回復一個確認包。從第二行第五個數(shù)據(jù)開始時對上層應用有用的字段,在進行上層開發(fā)時,可以從該處提取出串口中的數(shù)據(jù),其中0x0100,表示數(shù)據(jù)包的ID 號,緊跟其之后的是兩個字節(jié)0x3A00 表示接收到的數(shù)據(jù)包的序列號,接下來的0x 0200 表示錨節(jié)點的ID 號為2,0x0500 表示Move 節(jié)點的ID 號為5,0x0800 表示從2 號錨節(jié)點獲取到的5 號Move 節(jié)點的RSSI 值為8, 接下來的0x 0300 表示錨節(jié)點的ID號為3,0x0500 表示Move 節(jié)點的ID 號為5,0x0C00 表示從3 號錨節(jié)點獲取到的5 號Move節(jié)點的RSSI 值為0x0C, 接下來的0x 0400 表示錨節(jié)點的ID 號為4,0x0500 表示Move 節(jié)點的ID 號為5,0xF800 表示從4 號錨節(jié)點獲取到的5號Move節(jié)點的RSSI值為0Xf8,接下來的F207FE 為CRC 字段,最后一個7E 為數(shù)據(jù)幀的結(jié)束字段。通過以上分析,可以快速從串口通信數(shù)據(jù)中提取所需的字段,為上層開發(fā)奠定基礎。
2 系統(tǒng)設計
2.1 系統(tǒng)架構(gòu)
系統(tǒng)由底層(硬件層),中間層(串口消息解析層),上層(數(shù)據(jù)處理層)系統(tǒng)的構(gòu)架如圖7所示。
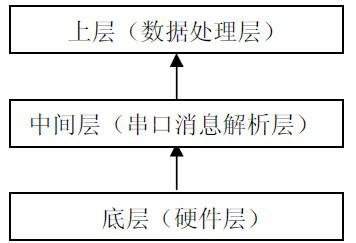
圖7 系統(tǒng)架構(gòu)
2.2 底層模塊設計
底層模塊通過Move 節(jié)點發(fā)送數(shù)據(jù)到Node1,Node2,Node3 節(jié)點,Node1,Node2,Node3節(jié)點分別從Move 節(jié)點中取出RSSI 值并將這些值連同自身的SOURECE_ADDRESS 值封裝到數(shù)據(jù)字段并通過Forward 節(jié)點轉(zhuǎn)發(fā)給Sink 無線網(wǎng)關(guān)節(jié)點。底層模塊結(jié)構(gòu)如圖8 所示:
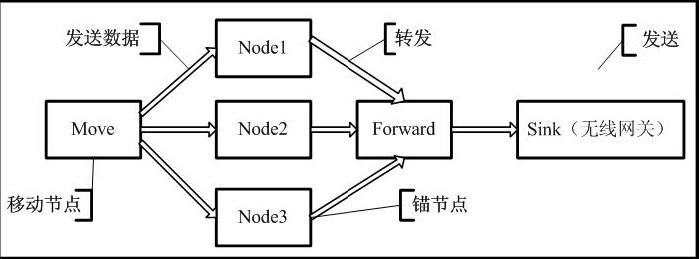
圖8底層結(jié)構(gòu)2.3 中間層模塊設計
該層主要負責接收來自底層的串口消息,該層的重點就是對串口數(shù)據(jù)包的內(nèi)容進行解析,獲取數(shù)據(jù)包中節(jié)點的RSSI 值、錨節(jié)點ID 號等信息,并將其交給上層進行處理。
2.4 上層模塊設計
本文將該基于無線傳感網(wǎng)絡的人群異常活動視頻監(jiān)控系統(tǒng)的上層模塊分為以下六個子模塊:
串口配置模塊:該模塊主要對串口的各項參數(shù)進行配置,在不同的網(wǎng)關(guān)連接上PC 機時配置不同的串口,使該系統(tǒng)的可擴展性增強。
實時監(jiān)控模塊:該模塊主要負責將無線傳感網(wǎng)絡中移動節(jié)點的軌跡信息實時顯示在監(jiān)控畫面當中;用戶通過點擊顯示樣例軌跡了解軌跡的概念;通過清除軌跡操作清除屏幕上的所有軌跡信息;此外,用戶可以通過調(diào)整顯示刷新周期,對軌跡數(shù)據(jù)的動態(tài)刷新周期進行設置;如果刷新周期設置過長,則通過手動刷新按鈕刷新軌跡以實時觀察移動節(jié)點的估計信息。
歷史回放模塊:該模塊主要根據(jù)用戶的設置回放移動節(jié)點的歷史軌跡。用戶根據(jù)自己的要求回放具體時間移動節(jié)點的軌跡信息,如回放一天、一天的一段時間;幾天、幾天里面的一段時間或者一個精確時間的被監(jiān)控人員的軌跡信息。此外,該模塊提供設置回放周期功能,用戶根據(jù)自己的需求設置每次回放的移動節(jié)點位置信息的個數(shù)和回放周期,系統(tǒng)將反饋給用戶查詢的時間段內(nèi)數(shù)據(jù)庫中所有記錄的條數(shù),用戶通過系統(tǒng)能清楚地知道需要回放的記錄條數(shù)以及待回放的記錄條數(shù)。
歷史數(shù)據(jù)查詢模塊:該模塊主要負責歷史數(shù)據(jù)的查詢功能,模塊包括人員位置/軌跡一般查詢、人員位置/軌跡高級查詢、歷史警報信息查詢?nèi)蠊δ堋F渲校藛T位置/軌跡高級查詢,主要根據(jù)用戶輸入的時間段信息查詢?nèi)藛T的軌跡信息,用戶根據(jù)需求查詢一天、一天的一段時間、幾天、幾天的一段時間或者是一個精確時刻的軌跡信息。此外,該部分還提供了一些其他功能,如用戶在顯示軌跡區(qū)域單擊一個點,該單擊點的在繪圖區(qū)域的坐標、該坐標對應的實際區(qū)域中的坐標及查詢?nèi)藛T在該實際坐標出現(xiàn)的次數(shù)都將被列出來顯示。歷史數(shù)據(jù)查詢模塊的另外一個重要功能就是歷史警報信息的查詢功能。該功能允許用戶查看所有的警報信息,即被監(jiān)測人員所出現(xiàn)的所有非安全區(qū)域的信息。此外,系統(tǒng)提供用戶根據(jù)需要刪除部分選定的警報信息的功能。
非安全域設置模塊:該模塊主要負責非安全域的設置。非安全域的正確設置對系統(tǒng)的自動報警功能及系統(tǒng)的可靠性起著極其重要的作用。所以只有擁有設置權(quán)限的用戶才能進行非安全域的設置。如果被監(jiān)控的人員出現(xiàn)在非安全區(qū)域,系統(tǒng)將觸發(fā)警報。非安全域即定義一個非安全域的中心和非安全域的半徑,所有處在該非安全域中的點將觸發(fā)報警功能。該模塊允許擁有權(quán)限的用戶根據(jù)實際需要對非安全域進行修改,添加,刪除和查詢等操作。
人員信息指南模塊:該模塊主要實現(xiàn)了對歷史數(shù)據(jù)的統(tǒng)計工作。用戶根據(jù)需求查詢指定區(qū)域內(nèi)出現(xiàn)的時間,此外,該模塊還提供查詢指定時間內(nèi)被監(jiān)控人員出現(xiàn)區(qū)域的功能。在指定區(qū)域出現(xiàn)的時間查詢窗體中,用戶設置需查詢的區(qū)域或者根據(jù)輸入要查詢的時間段,查詢結(jié)果將顯示所有查詢到的記錄條數(shù),此外,該部分還提供了其他的一些功能,如用戶可以獲得被監(jiān)控人員每個小時時段出現(xiàn)的次數(shù)以及每個小時時段在每天的24 小時中所占的比例,這樣根據(jù)查詢的結(jié)果用戶很容易獲取在指定區(qū)域被監(jiān)控的人員出現(xiàn)的最頻繁的時間。在指定時間內(nèi)位置信息查詢功能中,用戶輸入要查詢的時間段,得到查詢結(jié)果后,用戶單擊任意一條查詢結(jié)果,就可獲取該單擊點對應時刻和對應地點被監(jiān)控人員出現(xiàn)的次數(shù)。
報警并錄制現(xiàn)場模塊:報警并錄制現(xiàn)場模塊:該模塊提供報警和對現(xiàn)場進行錄像功能,系統(tǒng)在發(fā)現(xiàn)人員出現(xiàn)在非安全域時自動觸發(fā)報警并對現(xiàn)場進行一段時間的錄像操作。此外,系統(tǒng)還提供解除警報或結(jié)束現(xiàn)場錄制的功能。
3 系統(tǒng)實現(xiàn)
3.1 系統(tǒng)開發(fā)環(huán)境
本系統(tǒng)需要使用攝像頭、micaz 節(jié)點及無線網(wǎng)關(guān)。圖9所示為該系統(tǒng)中使用的主要硬件設施,從左至右依次為micaz 節(jié)點、無線網(wǎng)關(guān),攝像頭。無線網(wǎng)關(guān)與PC 機通過串口連接,micaz 節(jié)點之間通過無線方式進行相互之間的通信,攝像頭負責對現(xiàn)場進行錄像。
圖9 硬件設施
3.2 系統(tǒng)展示
圖10顯示了系統(tǒng)整體運行主界面,用戶可以通過該界面進入到各個子模塊界面當中進行相關(guān)操作。
圖10 系統(tǒng)運行主界面
圖11 顯示了被監(jiān)控人員的軌跡信息的實時監(jiān)控畫面:
圖11實時軌跡監(jiān)控
圖12 顯示了對實時軌跡信息的回放。
圖12 歷史數(shù)據(jù)回放
圖13 顯示了非安全域設置圖。
圖13 非安全域設置
圖14 顯示了被監(jiān)控人員在指定區(qū)域出現(xiàn)的時間。
圖14 人員在指定區(qū)域出現(xiàn)的時間查詢
圖15 顯示了對歷史軌跡數(shù)據(jù)進行高級查詢得到的結(jié)果。
圖15 歷史軌跡高級查詢
圖16 顯示了系統(tǒng)自動報警后,對現(xiàn)場進行錄像。
圖16 報警并錄制現(xiàn)場
4 結(jié)束語
本文基于無線傳感網(wǎng)絡定位技術(shù),設計一個人群異常活動視頻監(jiān)控系統(tǒng)。針對傳統(tǒng)的視頻監(jiān)控系統(tǒng)中存在監(jiān)控盲區(qū)等問題,本文設計的系統(tǒng)通過傳感器節(jié)點射頻芯片的接收信號強度對人員進行定位;通過設立非安全域監(jiān)視和識別人員的異常活動,當異常活動出現(xiàn),便自動報警并對現(xiàn)場進行錄像。本文設計的系統(tǒng)有效地避免了監(jiān)控盲區(qū)的出現(xiàn),同時自動報警功能讓監(jiān)控系統(tǒng)的工作效率得到提高。展望未來,視頻監(jiān)控系統(tǒng)的安全性、高效性以及智能化仍將是一個重點研究方向。
-
互聯(lián)網(wǎng)
+關(guān)注
關(guān)注
54文章
11209瀏覽量
104732 -
視頻監(jiān)控
+關(guān)注
關(guān)注
17文章
1717瀏覽量
65473 -
無線
+關(guān)注
關(guān)注
31文章
5500瀏覽量
174645 -
計算機
+關(guān)注
關(guān)注
19文章
7589瀏覽量
89480
發(fā)布評論請先 登錄
相關(guān)推薦
供水泵站遠程監(jiān)控物聯(lián)網(wǎng)系統(tǒng)方案
談談無線傳感器網(wǎng)絡的關(guān)鍵技術(shù)
LoRa技術(shù)農(nóng)田自動無線智能灌溉系統(tǒng)
無線室內(nèi)定位系統(tǒng)是通過什么技術(shù)實現(xiàn)的呢?

傳感器技術(shù)在構(gòu)建實時監(jiān)控系統(tǒng)中有什么作用
室內(nèi)外融合人員定位系統(tǒng)-4G/5G+藍牙+北斗RTK人員定位系統(tǒng)
工廠人員定位系統(tǒng)原理

電廠人員定位系統(tǒng)的功能和作用

智慧工廠藍牙人員定位系統(tǒng)功能
ai智能視頻監(jiān)控系統(tǒng) OpenCV

煤礦人員定位系統(tǒng)——基于UWB技術(shù)帶電子圍欄功能
無線溫濕度監(jiān)控系統(tǒng)
淺談隧道RFID定位系統(tǒng)
隧道視頻監(jiān)控系統(tǒng)介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論