") 符合SAE標(biāo)準(zhǔn)的HUD自動(dòng)化測(cè)量系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
符合SAE標(biāo)準(zhǔn)的HUD自動(dòng)化測(cè)量系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
平視(HUD)技術(shù)是汽車(chē)市場(chǎng)上最大的增長(zhǎng)領(lǐng)域之一,主要專(zhuān)注于通過(guò)改進(jìn)車(chē)輛駕駛方式和提高駕駛者意識(shí)來(lái)提升乘客安全度。調(diào)查,HUD技術(shù)目前已取得21.67%的復(fù)合年增長(zhǎng)率(CAGR),預(yù)計(jì)到2021年將實(shí)現(xiàn)13.3億美元的市場(chǎng)規(guī)模。這一增長(zhǎng)很大程度上源于顯示器技術(shù)的進(jìn)步,該技術(shù)成功做到了將光線(xiàn)投射到遠(yuǎn)景上。同時(shí),這也與增強(qiáng)現(xiàn)實(shí)(AR)技術(shù)應(yīng)用領(lǐng)域的進(jìn)步有關(guān),該技術(shù)能夠?qū)⑻摂M圖像疊加到現(xiàn)實(shí)環(huán)境中,用于實(shí)時(shí)顯示的駕駛情況信息。
圖1 跟AR顯示器一樣,HUD投影必須在精確位置上清晰可見(jiàn),確保能夠投射到遠(yuǎn)景上。通過(guò)確保HUD圖像位置、色彩、亮度和清晰度的正確性,可以強(qiáng)化駕駛者對(duì)周?chē)h(huán)境的感知,盡可能減少可能引起駕駛者分心的失誤。
跟任何其他顯示器一樣,視覺(jué)性能對(duì)HUD系統(tǒng)的功能至關(guān)重要。精確的系統(tǒng)設(shè)計(jì)和最終的質(zhì)量控制檢測(cè)可以確保投影位置,對(duì)焦,駕駛者觀察能夠看清,并且光線(xiàn)和色彩足夠生動(dòng),駕駛者能夠在任何照明條件下將其與周?chē)h(huán)境區(qū)別開(kāi)來(lái)。低質(zhì)量的投影不僅會(huì)損害制造商的品牌聲譽(yù),而且駕駛者在投影質(zhì)量不佳的情況下無(wú)法觀察顯示器時(shí),會(huì)使乘客處于危險(xiǎn)之中,這可能會(huì)導(dǎo)致駕駛員對(duì)信息的誤判、重要環(huán)境數(shù)據(jù)(如導(dǎo)航、物距以及其他提醒)丟失以及駕駛員分心。
由于質(zhì)量不佳的系統(tǒng)可能給消費(fèi)者造成巨大的安全隱患,各種車(chē)載HUD性能標(biāo)準(zhǔn)已相繼出臺(tái),旨在確保制造商根據(jù)質(zhì)量和安全基準(zhǔn)閾值對(duì)其生產(chǎn)的HUD進(jìn)行評(píng)估。SAE J1757-1(“車(chē)載顯示器標(biāo)準(zhǔn)測(cè)量方法”)和 ISO 15008(“道路車(chē)輛—運(yùn)輸信息和控制系統(tǒng)的人體工程學(xué)方面—車(chē)載視覺(jué)呈現(xiàn)的規(guī)范和測(cè)試程序”)是美國(guó)采用的兩種標(biāo)準(zhǔn)方法,概述了汽車(chē)HUD的質(zhì)量測(cè)試準(zhǔn)則。
作為有效的質(zhì)量控制解決方案,顯示器測(cè)試和亮度測(cè)量系統(tǒng)發(fā)揮了很大的作用,可確保制造商符合這些標(biāo)準(zhǔn)的測(cè)試方法,但測(cè)量系統(tǒng)性能和光學(xué)結(jié)構(gòu)的不同可能會(huì)導(dǎo)致不同的制造商之間存在質(zhì)量差異。出于此原因,美國(guó)將于2017年夏季發(fā)布新的標(biāo)準(zhǔn),進(jìn)一步控制用于評(píng)估HUD質(zhì)量的測(cè)量系統(tǒng)。本白皮書(shū)將為大家概述最新版 SAE J1757-2標(biāo)準(zhǔn)4的要求,并介紹一些獲得業(yè)界認(rèn)可的HUD測(cè)量方法,希望能夠幫助制造商符合最新的SAE和ISO質(zhì)量標(biāo)準(zhǔn)。本白皮書(shū)還將重點(diǎn)介紹自動(dòng)化測(cè)量系統(tǒng)的功能和優(yōu)勢(shì),幫助制造商在測(cè)量應(yīng)用中實(shí)現(xiàn)最佳時(shí)間和成本效益。
SAE J1757-2汽車(chē)HUD光學(xué)測(cè)量標(biāo)準(zhǔn)
HUD顯示對(duì)安全駕駛的重大影響已經(jīng)促使汽車(chē)測(cè)試和測(cè)量設(shè)備制造商與美國(guó)汽車(chē)工程師學(xué)會(huì)(SAE)展開(kāi)合作,根據(jù)SAE J1757-1標(biāo)準(zhǔn)和 ISO 15008 標(biāo)準(zhǔn)制定測(cè)量方法,用于評(píng)估HUD的顯示質(zhì)量。新的標(biāo)準(zhǔn)(SAE J1757-2“汽車(chē)HUD光學(xué)測(cè)量”)將于2017年夏末出臺(tái),為車(chē)輛HUD的測(cè)量提供光學(xué)測(cè)量結(jié)構(gòu)和方法,并明確相關(guān)要求,包括AR-HUD(增強(qiáng)現(xiàn)實(shí)平視顯示器)性能。標(biāo)準(zhǔn)化測(cè)量方法將確保虛擬圖像相對(duì)于駕駛者雙眼的準(zhǔn)確投射(包括景深(DOF)、視場(chǎng)(FOV)、屈光度、焦距、圖像位置和圖像距離)、HUD虛擬圖像在典型環(huán)境光線(xiàn)條件下的可識(shí)別性(需要進(jìn)行亮度、色度、均勻性和對(duì)比度測(cè)試)以及通過(guò)與目標(biāo)虛擬圖像的點(diǎn)偏差來(lái)測(cè)量HUD的圖像失真、像差和重影程度。這些測(cè)量需要根據(jù)NIST美國(guó)國(guó)家標(biāo)準(zhǔn)與技術(shù)研究院的規(guī)定對(duì)光學(xué)測(cè)量設(shè)備或儀器進(jìn)行標(biāo)定,并且要求將這些設(shè)備或儀器置于駕駛員眼橢圓視野區(qū)域內(nèi)的多個(gè)測(cè)量點(diǎn)來(lái)進(jìn)行測(cè)量(確保考慮到潛在可視角范圍)。
所有需要符合 SAE J1757-1 標(biāo)準(zhǔn)和 ISO 15008 標(biāo)準(zhǔn)的HUD制造商和汽車(chē)品牌,都必須根據(jù)新的 SAE J1757-2 HUD測(cè)量方法來(lái)設(shè)計(jì)自己的測(cè)量系統(tǒng)。雖然標(biāo)準(zhǔn)并沒(méi)有指定使用什么類(lèi)型的測(cè)量系統(tǒng),但市場(chǎng)上目前供應(yīng)的符合SAE標(biāo)準(zhǔn)的系統(tǒng)在功能上存在一些區(qū)別,因此在改進(jìn)設(shè)置和應(yīng)用方面的能力也會(huì)存在差異。先進(jìn)的成像系統(tǒng)提供自動(dòng)化測(cè)量功能,有助于縮短測(cè)量時(shí)間,降低測(cè)量難度,優(yōu)化設(shè)計(jì)和質(zhì)量控制流程,從而讓制造商能夠減少投資,加快產(chǎn)品上市速度。在HUD測(cè)量應(yīng)用中,為確保完全符合SAE標(biāo)準(zhǔn),制造商需要對(duì)HUD的每個(gè)特征進(jìn)行多次測(cè)量,因此自動(dòng)化系統(tǒng)將會(huì)有很大的發(fā)揮。
符合SAE標(biāo)準(zhǔn)的HUD測(cè)量系統(tǒng)
常見(jiàn)的方法
點(diǎn)式亮度計(jì)
點(diǎn)式亮度計(jì)的設(shè)計(jì)原理是測(cè)量在一個(gè)顯示區(qū)域內(nèi)的一個(gè)小點(diǎn)反射或發(fā)射的光線(xiàn)。點(diǎn)式亮度計(jì)提供高精度的亮度和色度測(cè)量,但由于取點(diǎn)測(cè)量區(qū)域非常小,因此它們無(wú)法通過(guò)一次測(cè)量對(duì)整個(gè)顯示器的均勻性、對(duì)比度、亮度和色度進(jìn)行評(píng)估。為了解決這個(gè)問(wèn)題,采用點(diǎn)式亮度計(jì)對(duì)顯示器進(jìn)行自動(dòng)化測(cè)量時(shí),制造商必須額外使用其他設(shè)備,如傳動(dòng)裝置或機(jī)械臂,確保能夠?qū)Ⅻc(diǎn)式亮度計(jì)架設(shè)在三軸測(cè)試平臺(tái)內(nèi)測(cè)量顯示屏每個(gè)點(diǎn)。然后,點(diǎn)式亮度計(jì)在每個(gè)點(diǎn)采集亮度和色度數(shù)據(jù),然后對(duì)這些數(shù)據(jù)進(jìn)行比較,以評(píng)估整個(gè)顯示器的均勻性、對(duì)比度以及其他測(cè)量參數(shù)。對(duì)于HUD測(cè)量應(yīng)用而言,這是一種可接受的解決方案,但要實(shí)現(xiàn)自動(dòng)化測(cè)量(在生產(chǎn)線(xiàn)上),考慮到成本和復(fù)雜性,因此搭配點(diǎn)式亮度計(jì)的解決方案并不理想。
除了亮度值和均勻性測(cè)量之外,SAE J1757-2 標(biāo)準(zhǔn)還要求對(duì)HUD遠(yuǎn)景平面內(nèi)所投影物體的位置、距離和圖像完整性進(jìn)行評(píng)估。點(diǎn)式亮度計(jì)無(wú)法采集二維圖像,因此無(wú)法基于構(gòu)成圖像的整個(gè)像素區(qū)域來(lái)分析所投影物體的范圍、尺寸和形狀。出于此原因,點(diǎn)式亮度計(jì)無(wú)法精確地反映所投影物體的特征,也無(wú)法量化整體均勻性、對(duì)比度以及與目標(biāo)圖像存在的傾斜度、失真度和重影度偏差。制造商必須額外使用一些設(shè)備來(lái)對(duì)點(diǎn)式亮度計(jì)進(jìn)行補(bǔ)充,以完成該標(biāo)準(zhǔn)要求的所有測(cè)試。
機(jī)器視覺(jué)相機(jī)
機(jī)器視覺(jué)相機(jī)是一種二維成像解決方案,用來(lái)定位和測(cè)量顯示器中的圖像,分析圖像中相鄰像素點(diǎn)和對(duì)比區(qū)域的亮度與色度。機(jī)器視覺(jué)相機(jī)對(duì)點(diǎn)式亮度計(jì)是很好的技術(shù)補(bǔ)充,即提供點(diǎn)式亮度計(jì)無(wú)法獨(dú)立實(shí)現(xiàn)的測(cè)量功能,比如基于像素計(jì)算或局部區(qū)域位置(如文本的光學(xué)字符識(shí)別(OCV))來(lái)評(píng)估物體的狀、尺寸、失真度、重影度或其他特征。但機(jī)器視覺(jué)相機(jī)無(wú)法單獨(dú)執(zhí)行所有HUD測(cè)量任務(wù)。如果將點(diǎn)式亮度計(jì)與機(jī)器視覺(jué)相機(jī)結(jié)合在一起創(chuàng)建一套解決方案,通過(guò)利用點(diǎn)式亮度計(jì)的測(cè)量精度與機(jī)器視覺(jué)相機(jī)的快速成像能力、測(cè)距與定位能力,可以實(shí)現(xiàn)對(duì)HUD的全面評(píng)估。
人工檢測(cè)員
人工檢測(cè)一直在HUD測(cè)量流程中發(fā)揮作用的原因有多種,主要原因在于測(cè)量驗(yàn)證的需要。人工檢測(cè)能夠極其快速地對(duì)顯示器質(zhì)量作出判斷,只需看一眼就能對(duì)整個(gè)顯示器進(jìn)行評(píng)估,同時(shí)還能運(yùn)用背景(而非具體亮度值)來(lái)確定可接受性。相比之下,點(diǎn)式亮度計(jì)必須在顯示器圖像中采集多達(dá)九個(gè)測(cè)量點(diǎn)的數(shù)據(jù),來(lái)對(duì)亮度、色彩和所測(cè)量光線(xiàn)的其他特征進(jìn)行比較,使得這種解決方案在設(shè)置、執(zhí)行和分析方面十分耗時(shí)。人工檢測(cè)速度極快,這有助于執(zhí)行多項(xiàng)HUD測(cè)量,包括對(duì)HUD中所投影圖像的對(duì)比度進(jìn)行評(píng)估。該評(píng)估是通過(guò)比較HUD系統(tǒng)所投影的黑白圖像的黑暗區(qū)域與發(fā)光區(qū)域來(lái)執(zhí)行的。人工檢測(cè)員通過(guò)對(duì)圖像進(jìn)行主觀評(píng)估,或者比較一系列基準(zhǔn)數(shù)字化測(cè)量,就能夠確定圖像對(duì)比度是否可接受,無(wú)需執(zhí)行任何計(jì)算。
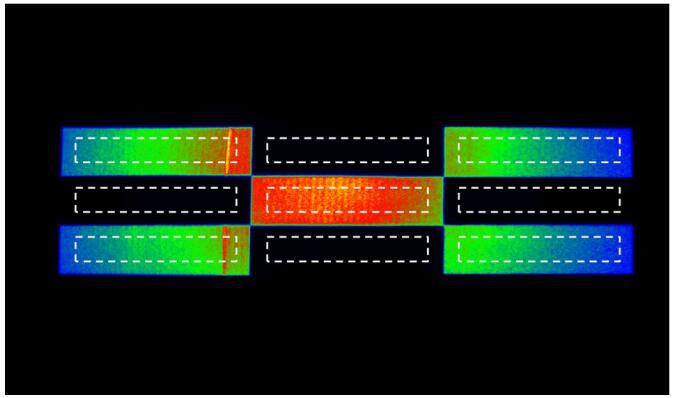
圖2 - 使用亮度測(cè)量軟件對(duì)HUD系統(tǒng)投影的棋盤(pán)格測(cè)試圖案進(jìn)行分析,然后將發(fā)光區(qū)域的平均亮度值除以黑暗區(qū)域的平均亮度值,來(lái)計(jì)算對(duì)比度。但人工檢測(cè)員可能無(wú)需進(jìn)行任何計(jì)算就能作出量化判斷。
跟任何其他人工檢測(cè)一樣,這種方法的缺點(diǎn)在于缺乏可量化的測(cè)量數(shù)據(jù)。這種數(shù)據(jù)的缺乏會(huì)影響所執(zhí)行測(cè)量的精度和可重復(fù)性,阻礙HUD分析的自動(dòng)化執(zhí)行,從而無(wú)法實(shí)現(xiàn)生產(chǎn)線(xiàn)連續(xù)評(píng)估。此外,對(duì)于 SAE 標(biāo)準(zhǔn)規(guī)定的大部分HUD測(cè)量,人工檢測(cè)都無(wú)法充分執(zhí)行,因?yàn)檫@些測(cè)量需要可量化的數(shù)據(jù)來(lái)評(píng)估測(cè)量準(zhǔn)確性。在不要求進(jìn)行可量化測(cè)量的情況下,人工檢測(cè)可能能夠評(píng)估HUD質(zhì)量的某些方面,但機(jī)械系統(tǒng)則提供更完整的解決方案,確保能夠滿(mǎn)足SAE標(biāo)準(zhǔn)規(guī)定的所有其他測(cè)量要求。這些自動(dòng)化技術(shù)使汽車(chē)制造商和供應(yīng)商只需投入少量時(shí)間和精力,就能針對(duì)HUD的質(zhì)量高效實(shí)施SAE標(biāo)準(zhǔn)測(cè)量,同時(shí)維持測(cè)量數(shù)據(jù)的精確性。
自動(dòng)化替代方案
成像色度計(jì)和亮度計(jì)
成像色度計(jì)和亮度計(jì)是 SAE J1757-2 標(biāo)準(zhǔn)中提及的有關(guān)HUD測(cè)試的主要解決方案,使用根據(jù)NIST(美國(guó)國(guó)家標(biāo)準(zhǔn)與技術(shù)研究院)標(biāo)準(zhǔn)標(biāo)定的組件來(lái)提供自動(dòng)化視覺(jué)檢測(cè)。這些系統(tǒng)兼具點(diǎn)式亮度計(jì)的亮度測(cè)量功能與機(jī)器視覺(jué)相機(jī)的圖像采集和檢測(cè)功能,能夠提供亮度、色度和對(duì)比度以及物體存在性、位置、尺寸、形狀和距離方面的絕對(duì)測(cè)量保證。相比其他系統(tǒng),亮度成像解決方案在HUD測(cè)量應(yīng)用中具備多種優(yōu)勢(shì)。
這些自動(dòng)化技術(shù)使汽車(chē)制造商和供應(yīng)商只需投入少量時(shí)間和精力,就能針對(duì)HUD的質(zhì)量高效實(shí)施SAE標(biāo)準(zhǔn)測(cè)量,同時(shí)維持測(cè)量數(shù)據(jù)的精確性。
不同HUD測(cè)量裝置在生產(chǎn)環(huán)境下的比較
要充分了解自動(dòng)化HUD測(cè)量系統(tǒng)的效率,一種有用的方法是以可視化方式的SAE J1757-2標(biāo)準(zhǔn)HUD測(cè)量系統(tǒng)。下面的兩張圖片描繪了兩種生產(chǎn)級(jí)測(cè)量系統(tǒng)之間的區(qū)別。在這兩張圖片中,相機(jī)放置在相對(duì)于車(chē)輛駕駛員位置的眼眶區(qū)域內(nèi)。相機(jī)與HUD系統(tǒng)指向相同的方向,HUD系統(tǒng)向暗場(chǎng)通道(用于遮擋環(huán)境光線(xiàn))的背面(稱(chēng)為“無(wú)限平面”)投影數(shù)字圖像。兩個(gè)插圖中均沒(méi)有所連接的計(jì)算機(jī)系統(tǒng)。在計(jì)算機(jī)系統(tǒng)中,通過(guò)運(yùn)行軟件來(lái)控制HUD系統(tǒng)投影來(lái)進(jìn)行測(cè)試,同時(shí)還采集、存儲(chǔ)和處理測(cè)量數(shù)據(jù)。
在第一張圖片中(圖3),制造商使用了一臺(tái)點(diǎn)式亮度計(jì)和一套機(jī)器視覺(jué)系統(tǒng),分別用于測(cè)量亮度和評(píng)估所投影圖像的物理特征。如上所述,這樣的解決方案需要另外安裝傳動(dòng)裝置或機(jī)械臂,用于使點(diǎn)式亮度計(jì)采集多個(gè)測(cè)量點(diǎn)的過(guò)程實(shí)現(xiàn)自動(dòng)化。在該插圖中,制造商將點(diǎn)式亮度計(jì)和機(jī)器視覺(jué)相機(jī)安裝到了機(jī)械臂的末端。制造商還可以利用人工檢測(cè)進(jìn)一步提升該解決方案,驗(yàn)證對(duì)比度評(píng)估,并加快比較點(diǎn)式亮度計(jì)在多個(gè)點(diǎn)所采集數(shù)據(jù)的過(guò)程。
在第二張插圖中(圖4),制造商使用了一臺(tái)成像亮度計(jì),用于在生產(chǎn)線(xiàn)上執(zhí)行HUD評(píng)估。由于成像亮度計(jì)可以同時(shí)提供亮度測(cè)量和視覺(jué)檢測(cè)功能,并且能夠采集HUD投影的二維圖像,因此其能夠通過(guò)一個(gè)圖像執(zhí)行SAE HUD評(píng)估標(biāo)準(zhǔn)所要求的所有測(cè)量。如果需要重新定位測(cè)量系統(tǒng),成像亮度計(jì)的電子鏡頭(本白皮書(shū)后文將談到)可以解決圖像距離和光學(xué)焦距方面的差異問(wèn)題。
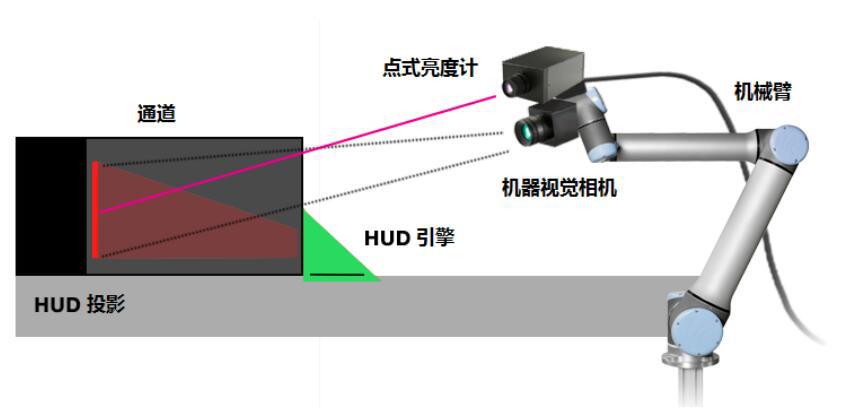
圖3 - HUD測(cè)量設(shè)備在生產(chǎn)應(yīng)用中的示例;機(jī)械臂上安裝的點(diǎn)式亮度計(jì)用于測(cè)量亮度,機(jī)器視覺(jué)相機(jī)用于進(jìn)行2D圖像分析。
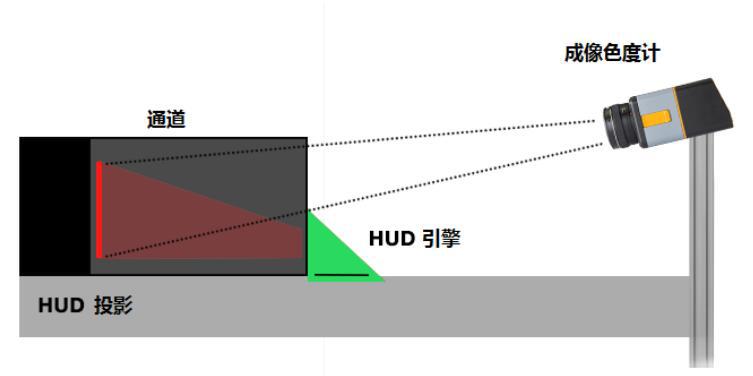
圖4 - HUD測(cè)量設(shè)備在生產(chǎn)應(yīng)用中的示例;固定式成像亮度計(jì)用于同時(shí)執(zhí)行亮度測(cè)量和2D圖像分析。
通過(guò)比較這兩張插圖,我們很容易就會(huì)因?yàn)樗璧脑O(shè)備數(shù)量、解決方案的成本以及設(shè)備組合的復(fù)雜性,而對(duì)點(diǎn)式亮度計(jì)/機(jī)器視覺(jué)組合解決方案持懷疑態(tài)度,更不用提及為確保系統(tǒng)穩(wěn)定性而必須維護(hù)的大量變量因素。同時(shí),我們還應(yīng)當(dāng)考慮對(duì)每套HUD系統(tǒng)執(zhí)行完整的評(píng)估所需的時(shí)間。相比點(diǎn)式亮度計(jì)/機(jī)器視覺(jué)組合解決方案必須在多個(gè)點(diǎn)采集測(cè)量數(shù)據(jù),成像亮度計(jì)解決方案只需花費(fèi)極少的時(shí)間,就能評(píng)估整個(gè)HUD系統(tǒng),這使得成像亮度計(jì)更適合在量產(chǎn)環(huán)境下高效執(zhí)行檢測(cè)。
通過(guò)自動(dòng)化系統(tǒng)簡(jiǎn)化SAE標(biāo)準(zhǔn)測(cè)量
計(jì)算物體距離和位置
SAE J1757-2標(biāo)準(zhǔn)規(guī)定,用于執(zhí)行HUD評(píng)估的光學(xué)測(cè)量系統(tǒng)必須測(cè)量標(biāo)定眼橢圓中心(與駕駛員距離最近的視覺(jué)焦點(diǎn))與在投射虛擬圖像的感知距離下定位的不透明單色無(wú)限平面(表面)之間的“真正距離”。在標(biāo)準(zhǔn)測(cè)量系統(tǒng)中,利用相機(jī)的焦距可以完成由近到遠(yuǎn)的距離測(cè)量,用于評(píng)估沿著水平面上的各個(gè)點(diǎn),其中,相機(jī)能夠采集到位于焦距內(nèi)物體的圖像。這些測(cè)量必須按實(shí)際距離單位進(jìn)行計(jì)算,以了解兩個(gè)點(diǎn)之間的物理距離。
要將焦距換算為實(shí)際距離單位,可以手動(dòng)進(jìn)行計(jì)算,但有些測(cè)量系統(tǒng)可以自動(dòng)執(zhí)行這種換算。這類(lèi)系統(tǒng)利用內(nèi)置軟件算法提供焦距與實(shí)際距離之間的換算,讓操作員能夠在系統(tǒng)軟件結(jié)果中以實(shí)際距離單位顯示測(cè)量數(shù)據(jù)。這類(lèi)系統(tǒng)在實(shí)際應(yīng)用中的顯著優(yōu)勢(shì)就是節(jié)省時(shí)間,其能夠立即按所要求的測(cè)量單位提供數(shù)據(jù),不僅縮短了計(jì)算時(shí)間,同時(shí)還減少了計(jì)算和換算不同組的數(shù)據(jù)點(diǎn)時(shí)容易出現(xiàn)的誤差幅度。
執(zhí)行多次測(cè)量
為了解決車(chē)輛駕駛員觀看HUD投影時(shí)存在多個(gè)潛在視角的問(wèn)題,以及計(jì)算誤差幅度的平均值,SAE J1757-2標(biāo)準(zhǔn)要求在水平面上的不同位置至少進(jìn)行三次測(cè)量,以確定虛擬圖像的相對(duì)距離。如果采用配備固定鏡頭的標(biāo)準(zhǔn)測(cè)量系統(tǒng),對(duì)多個(gè)點(diǎn)進(jìn)行測(cè)量將是一個(gè)費(fèi)時(shí)且耗力的過(guò)程,這是因?yàn)椴僮鲉T將必須在每個(gè)位置對(duì)相機(jī)進(jìn)行手動(dòng)調(diào)節(jié),以確保圖像位于焦距內(nèi),這樣才能夠在不同的測(cè)量點(diǎn)獲得等效測(cè)量數(shù)據(jù)。相反,如果采用配備電子控制鏡頭的系統(tǒng),將可以極大地提高多個(gè)角度、位置和距離的測(cè)量速度和精度。如右側(cè)的示例所示,這些鏡頭可以遠(yuǎn)程調(diào)節(jié),確保焦距和光圈設(shè)置合適,讓圖像始終位于水平面或者無(wú)限平面上。當(dāng)對(duì)成像色度計(jì)重新定位,以執(zhí)行連續(xù)測(cè)量時(shí),我們可以在系統(tǒng)軟件中進(jìn)行一些簡(jiǎn)單的調(diào)節(jié),快速確保成像儀的電子鏡頭適應(yīng)需求,能夠在任何距離或位置聚焦物體。
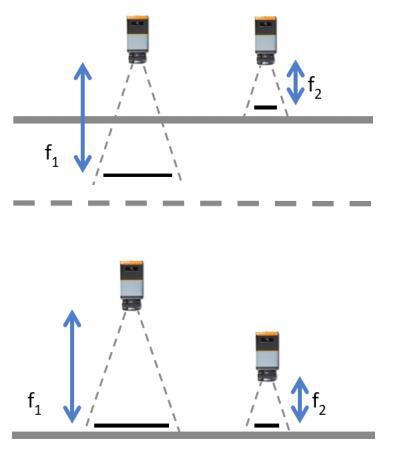
圖5 - 無(wú)論是在圖像與車(chē)輛駕駛員眼睛之間的距離存在變化的情況下,還是需要將相機(jī)定位在更靠近HUD投影區(qū)域內(nèi)數(shù)字圖像的位置,配備電子控制鏡頭的成像系統(tǒng)都能夠針對(duì)所投射的圖像遠(yuǎn)程調(diào)節(jié)光圈和焦距設(shè)置。
測(cè)量彩色物體的亮度
根據(jù) SAE J1757-2 標(biāo)準(zhǔn),制造商必須達(dá)到最低亮度閾值,以確保在任何環(huán)境光線(xiàn)條件下(白天或夜晚)疊加到現(xiàn)實(shí)環(huán)境中的HUD虛擬圖像的清晰度。然而,要測(cè)量HUD投影中每個(gè)虛擬圖像的亮度,意味著必須考慮各種物體形狀、尺寸、色彩和位置。如果使用基于靜態(tài)關(guān)注點(diǎn)(POI)來(lái)定位物體的測(cè)量系統(tǒng),這一過(guò)程將需要多個(gè)步驟才能完成。對(duì)于投射到HUD中的每個(gè)物體,靜態(tài)POI系統(tǒng)將通過(guò)查看軟件繪制的靜態(tài)POI窗口來(lái)定位目標(biāo)物體。成像系統(tǒng)將利用該P(yáng)OI來(lái)確定將圖像中的哪組像素用于亮度測(cè)量。如果所投射的物體落在該P(yáng)OI范圍以外,可能會(huì)導(dǎo)致亮度測(cè)量不準(zhǔn)確。此外,隨著投射變化,或者上出現(xiàn)了新的虛擬圖像,在執(zhí)行亮度測(cè)量之前,還必須繪制新的POI,確保將每個(gè)新的物體包含在其中。

圖6 - 跟AR一樣,HUD也會(huì)將數(shù)字圖像疊加到現(xiàn)實(shí)環(huán)境中。因此,所投射的圖像在各種背景下的清晰度將會(huì)涉及重要的安全問(wèn)題。圖像必須足夠清晰,確保在白天、夜晚以及各種天氣條件下都清晰可辨。
有些先進(jìn)的亮度測(cè)量系統(tǒng)提供強(qiáng)大的軟件功能,能夠?qū)OI設(shè)置過(guò)程完全自動(dòng)化,充分適應(yīng)投射中存在多個(gè)物體甚至無(wú)法預(yù)測(cè)物體的需要。舉例來(lái)說(shuō),有一種軟件功能稱(chēng)為Auto-POI(自動(dòng)關(guān)注點(diǎn)),其能夠創(chuàng)建動(dòng)態(tài)POI窗口,自動(dòng)適應(yīng)所定義顏色公差范圍內(nèi)物體像素的需要。制造商可能希望一次性評(píng)估投影圖像中出現(xiàn)的所有紅色物體的亮度。要完成該測(cè)量,制造商可以在軟件中設(shè)置最小和最大CIE色坐標(biāo)(Cx, Cy),確保將目標(biāo)物體組中代表的紅色值范圍包含在內(nèi)。然后,通過(guò)利用自動(dòng)POI功能,該軟件將“對(duì)齊”到與所定義的條件相匹配的任何一組紅色連續(xù)像素,從而創(chuàng)建精確的測(cè)量區(qū)域,不受物體形狀、尺寸或位置的影響。即使出現(xiàn)新的投影,也能夠一次性或根據(jù)要求采集自動(dòng)POI范圍內(nèi)與所定義的顏色公差相匹配的物體圖像,并測(cè)量亮度值。
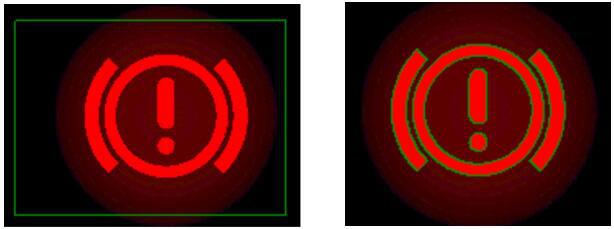
圖7 - 軟件中手動(dòng)繪制的靜態(tài)POI與基于顏色公差和物體變化自動(dòng)創(chuàng)建的動(dòng)態(tài)POI(自動(dòng)關(guān)注點(diǎn))之比較。
Auto-POI功能允許一次性對(duì)多個(gè)顏色組進(jìn)行編程,從而使制造商能夠在一個(gè)圖像中同時(shí)測(cè)量所有物體,不受顏色的影響。此外,在指定顏色值公差時(shí),制造商可以選擇輸入CIE坐標(biāo)作為數(shù)據(jù),也可以在CIE色表上繪制色區(qū)(使用光標(biāo)創(chuàng)建一個(gè)橢圓、矩形或多邊形)來(lái)指定POI公差范圍。這些功能可以使測(cè)量過(guò)程完全自動(dòng)化,為制造商提供一種“全自動(dòng)”方法,在定義所有物體顏色后,即可自動(dòng)執(zhí)行亮度測(cè)量。將Auto-POI功能與電子控制鏡頭結(jié)合在一起,可在物體定位和評(píng)估方面帶來(lái)極大的靈活性,使制造商在每個(gè)定義的測(cè)量點(diǎn)能夠幾乎即時(shí)完成數(shù)據(jù)采集。
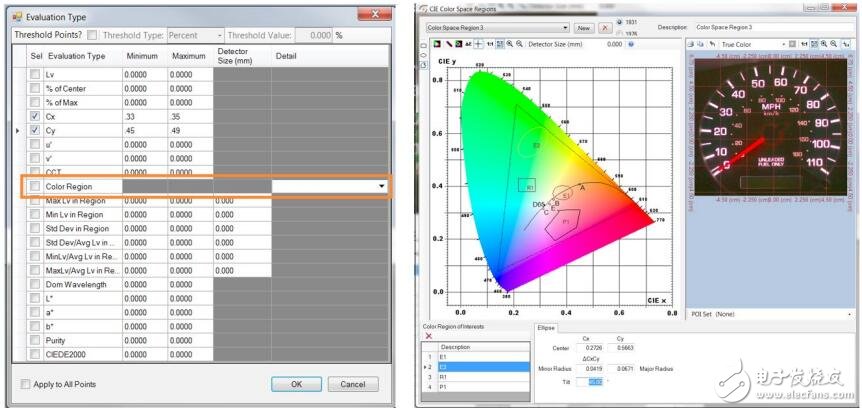
圖8 - 通過(guò)選擇自動(dòng)POI軟件工具中的“色區(qū)”,用戶(hù)能夠在CIE色表中繪制不同形狀,用于定義應(yīng)當(dāng)包含在測(cè)量POI組中彩色物體的Cx, Cy公差范圍。
測(cè)量重影問(wèn)題
HUD投影中的物體通過(guò)HUD系統(tǒng)所發(fā)射光線(xiàn)的反射組合來(lái)顯現(xiàn)。作為主要面的汽車(chē)擋風(fēng)玻璃,由玻璃內(nèi)表面和外表面組成,兩面都會(huì)接收HUD發(fā)射的光線(xiàn),并從獨(dú)特的角度將光線(xiàn)反射回駕駛員的眼睛。這些光線(xiàn)反射將創(chuàng)建HUD投影的目標(biāo)虛擬圖像,如果光線(xiàn)發(fā)射角度不正確,還會(huì)形成“重影圖像”。在無(wú)法完全對(duì)齊的情況下,這種雙重圖像會(huì)導(dǎo)致模糊,可能極大地影響重要HUD投影的可視化。
為了檢測(cè)和評(píng)估HUD投影中的重影范圍,測(cè)量系統(tǒng)必須能夠定位重影圖像與目標(biāo)圖像之間關(guān)聯(lián)點(diǎn)的位置。然后,對(duì)這些位置進(jìn)行比較,以確定偏差程度,并提供必要的信息來(lái)對(duì)HUD進(jìn)行糾正。如果測(cè)量系統(tǒng)的配套軟件能夠提供圖像處理功能,比如圖像自動(dòng)匹配(RADA),則可以使該比較過(guò)程實(shí)現(xiàn)自動(dòng)化,通過(guò)一次評(píng)估自動(dòng)完成失真圖像與目標(biāo)圖像之間關(guān)聯(lián)點(diǎn)位置的比較。RADA功能通常用于處理歪斜、扭曲和錯(cuò)位的圖像,并以正確的形狀和高寬比呈現(xiàn)它們。由于RADA功能必須獲取實(shí)際與理想虛擬圖像的物體定位數(shù)據(jù)才能執(zhí)行該過(guò)程,具備RADA功能的檢測(cè)系統(tǒng)需要預(yù)先裝備,以采集并比較表明物體位置的坐標(biāo)數(shù)據(jù),從而使圖像重影的檢測(cè)和測(cè)量過(guò)程實(shí)現(xiàn)自動(dòng)化。
測(cè)量圖像失真
SAE J1757-2 標(biāo)準(zhǔn)將失真定義為虛擬圖像中的每個(gè)測(cè)量點(diǎn)與目標(biāo)坐標(biāo)相比的幾何偏差。失真可能包括像差、圖像彎曲、扭曲等,所有這些都可以利用原始或測(cè)得虛擬圖像的邊緣像素與二次或目標(biāo)虛擬圖像的邊緣像素之間的距離來(lái)計(jì)算。在HUD中,如果投影圖像錯(cuò)位或不均勻,雖然人類(lèi)的雙目視覺(jué)會(huì)設(shè)法將其調(diào)和為單一的圖像,但這種缺陷可能會(huì)導(dǎo)致物體焦距或景深感知錯(cuò)誤。如果HUD無(wú)法增加與現(xiàn)實(shí)物體相對(duì)位置相關(guān)的數(shù)據(jù),還可能會(huì)發(fā)生投影圖像定位錯(cuò)誤。這不僅可能會(huì)影響安全,而且圖像失真還會(huì)對(duì)顯示器的感知質(zhì)量產(chǎn)生重大影響,進(jìn)而損害采用該顯示器的車(chē)輛制造商的聲譽(yù)。
調(diào)制傳遞函數(shù)(MTF)是自動(dòng)化精確檢測(cè)圖像失真不可或缺的一個(gè)參數(shù)。MTF用于測(cè)量光學(xué)系統(tǒng)的成像性能,特別是用于定義相機(jī)生成物體圖像的功能,檢測(cè)相機(jī)能否以足夠高的分辨率采集到對(duì)比度(清晰度)足夠高的物體圖像,確保精確地反映在現(xiàn)實(shí)世界中所看到的該物體。相機(jī)無(wú)法生成與現(xiàn)實(shí)難以區(qū)分的圖像的原因有多種,首先是相機(jī)所接收光的特性,相機(jī)鏡頭、傳感器分辨率和動(dòng)態(tài)范圍的局限性也會(huì)進(jìn)一步對(duì)圖像產(chǎn)生影響。這些因素會(huì)影響圖像質(zhì)量,而當(dāng)我們基于圖像進(jìn)行軟件測(cè)試時(shí),圖像質(zhì)量將決定測(cè)量精度。MTF參數(shù)可用于測(cè)量光學(xué)系統(tǒng)彌補(bǔ)技術(shù)局限性并盡可能正確處理光線(xiàn)的能力。
由于要實(shí)現(xiàn)精確測(cè)量,必須了解圖像失真的起因,因此MTF參數(shù)在測(cè)量圖像失真方面具有重要作用。就跟HUD系統(tǒng)中的異常情況可能會(huì)導(dǎo)致投影中出現(xiàn)像差一樣,像差也可能是由相機(jī)引起的,因?yàn)橄鄼C(jī)需要從HUD投影中采集光的信息來(lái)創(chuàng)建CCD圖像。如果相機(jī)無(wú)法提供足夠高的光學(xué)性能來(lái)生成清晰的圖像,測(cè)量系統(tǒng)可能出現(xiàn)漏報(bào)缺陷的情況,未能清晰顯示HUD圖像失真。這可能會(huì)導(dǎo)致后續(xù)測(cè)試出現(xiàn)問(wèn)題,無(wú)法精確地測(cè)量數(shù)字物體的尺寸、位置甚至總體亮度,因?yàn)橄鄼C(jī)無(wú)法清晰地呈現(xiàn)圖像特征和邊緣。
先進(jìn)的測(cè)量系統(tǒng)能夠在配套軟件中提供MTF測(cè)試,使用戶(hù)能夠測(cè)試相機(jī)的光學(xué)性能,確保HUD圖像失真的精確評(píng)估。有些系統(tǒng)采用ISO 12233方法來(lái)測(cè)量MTF,利用斜邊模式來(lái)確定成像系統(tǒng)的性能,對(duì)相機(jī)的性能進(jìn)行非常嚴(yán)苛的評(píng)估。采用這種方法時(shí),將待成像的物體呈一定的傾斜角度置于相機(jī)前面,確保物體中的黑白界線(xiàn)與相機(jī)CCD像素的垂直軸不相匹配。由于每個(gè)像素接收到的亮度值并不一致,相機(jī)必須能夠確定亮度值的亞像素差異,以確保在其穿過(guò)傳感器像素時(shí),能夠投射亮區(qū)域與暗區(qū)域之間的邊緣位置。
通過(guò)評(píng)估成像系統(tǒng)對(duì)“邊緣”的反應(yīng),該過(guò)程反映了相機(jī)傳感器的有效分辨率,以及相機(jī)生成清晰、精確圖像的能力。該反應(yīng)稱(chēng)為“邊緣擴(kuò)散函數(shù)(ESF)”。如果測(cè)量系統(tǒng)能夠基于這些方法評(píng)估它們相機(jī)的性能,則能夠非常可靠地確定HUD圖像失真的原因,從而極大地減少圖像分析中的誤差幅度。
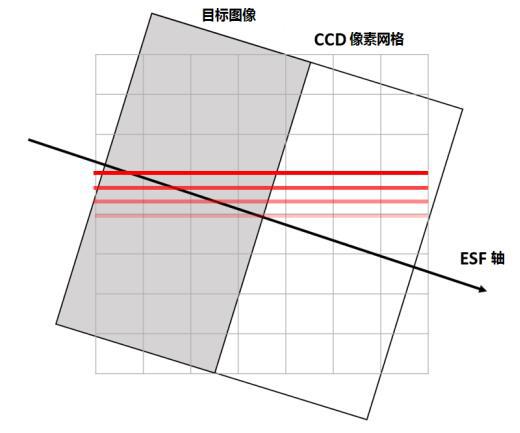
圖9 - 在用于計(jì)算相機(jī)ESF參數(shù)的斜邊測(cè)量中,將目標(biāo)圖像旋轉(zhuǎn)偏離CCD像素軸5度。紅色線(xiàn)條的是每條像素線(xiàn)感興趣區(qū)域的亮度截面。
多項(xiàng)測(cè)量的測(cè)試序列
由于HUD投影的獨(dú)特性質(zhì)以及車(chē)輛駕駛員對(duì)可見(jiàn)性的要求,包括物體亮度和上文所述的定位條件,HUD測(cè)試和測(cè)量過(guò)程通常會(huì)涉及多個(gè)步驟,才能執(zhí)行完整的質(zhì)量評(píng)估。根據(jù) SAE J1757-2 標(biāo)準(zhǔn),測(cè)量系統(tǒng)必須在交錯(cuò)模式的棋盤(pán)格圖像上執(zhí)行亮度測(cè)量,以確定環(huán)境光線(xiàn)下白色和黑色投影的虛擬圖像對(duì)比度。測(cè)量系統(tǒng)還必須確定虛擬圖像的亮度均勻性和非均勻性,以及與目標(biāo)虛擬圖像相比的色度。此外,如上所述,還必須進(jìn)行其他測(cè)量來(lái)確定圖像失真和像差,以確保與目標(biāo)虛擬圖像相比,實(shí)際虛擬圖像具有精確的圖像形狀和位置。
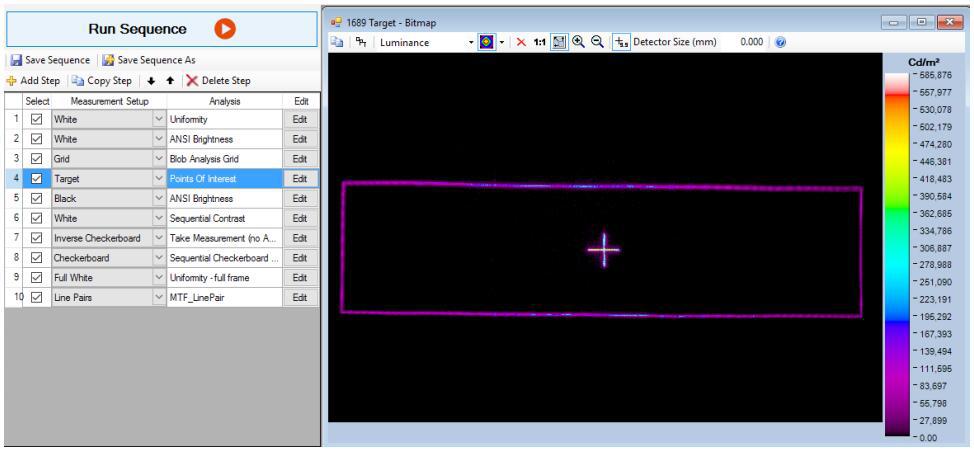
圖10 - 上面的測(cè)試序列軟件通過(guò)10個(gè)步驟來(lái)編程,從均勻性到MTF線(xiàn)對(duì)分析,全面涵蓋,一次性對(duì)HUD投影執(zhí)行多項(xiàng)測(cè)量。
要對(duì)HUD進(jìn)行完整的評(píng)估,所需執(zhí)行的所有測(cè)量的復(fù)雜性不僅取決于測(cè)量硬件的靈活性,還取決于測(cè)量軟件的局限性。如果所選的測(cè)量系統(tǒng)采用的軟件每次只能執(zhí)行一項(xiàng)測(cè)量,或者測(cè)量系統(tǒng)采用專(zhuān)為特定測(cè)量應(yīng)用開(kāi)發(fā)的多個(gè)軟件包,那么完整的測(cè)量過(guò)程可能會(huì)非常耗時(shí)。舉例來(lái)說(shuō),制造商在應(yīng)用中采用亮度系統(tǒng)進(jìn)行亮度測(cè)量,然后另外配備一套視覺(jué)檢測(cè)系統(tǒng)來(lái)測(cè)量物體位置,這樣將會(huì)非常耗時(shí)。事實(shí)上,制造商可以采用自動(dòng)化測(cè)試序列軟件,通過(guò)單一的系統(tǒng)就能快速、連續(xù)執(zhí)行多項(xiàng)測(cè)量。測(cè)試序列軟件程序允許在統(tǒng)一的軟件環(huán)境中,將不同的測(cè)量準(zhǔn)則、POI和檢測(cè)公差編程到一系列單獨(dú)的步驟中,然后按順序?qū)UD完成多個(gè)部分的評(píng)估。這將使測(cè)量系統(tǒng)能夠自動(dòng)執(zhí)行亮度、色度、位置和距離測(cè)量,從而完成對(duì)HUD多個(gè)方面的評(píng)估,無(wú)需因?yàn)槿碌臏?zhǔn)則或系統(tǒng)更換而重新對(duì)測(cè)量軟件進(jìn)行編程。
結(jié)論
隨著SAE J1757-2標(biāo)準(zhǔn)的最終確定和出臺(tái),以及HUD市場(chǎng)的快速增長(zhǎng),汽車(chē)制造商和供應(yīng)商對(duì)高效測(cè)量系統(tǒng)的需求將會(huì)日益增加,以確保產(chǎn)品能夠符合該標(biāo)準(zhǔn),同時(shí)維持自己在汽車(chē)行業(yè)的各種合作關(guān)系和市場(chǎng)競(jìng)爭(zhēng)力。由于SAE標(biāo)準(zhǔn)符合性成為了HUD選擇的基準(zhǔn)條件,制造商的競(jìng)爭(zhēng)優(yōu)勢(shì)將體現(xiàn)在能否快速、高效地生產(chǎn)出優(yōu)質(zhì)產(chǎn)品,確保實(shí)現(xiàn)自身技術(shù)的最佳價(jià)值。由成像亮度計(jì)或色度計(jì)及先進(jìn)的測(cè)試定序軟件組成的HUD自動(dòng)化測(cè)量系統(tǒng)將可以極大地縮短HUD評(píng)估時(shí)間,從而實(shí)現(xiàn)生產(chǎn)級(jí)高效測(cè)量,確保符合該標(biāo)準(zhǔn)的同時(shí),還能降低生產(chǎn)成本,并加快產(chǎn)品上市時(shí)間。
-
顯示器
+關(guān)注
關(guān)注
21文章
4980瀏覽量
140035 -
汽車(chē)電子
+關(guān)注
關(guān)注
3026文章
7964瀏覽量
167088 -
測(cè)量系統(tǒng)
+關(guān)注
關(guān)注
2文章
539瀏覽量
41401
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
地區(qū)變電站自動(dòng)化系統(tǒng)設(shè)計(jì)
自動(dòng)化設(shè)備的電氣標(biāo)準(zhǔn)(符合電磁兼容系統(tǒng)要求)
開(kāi)關(guān)電源自動(dòng)化測(cè)試系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
饋線(xiàn)自動(dòng)化通信系統(tǒng)怎么實(shí)現(xiàn)?
數(shù)字示波器NSAT-3010自動(dòng)化計(jì)量軟件系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
LabVIEW與Tektronix示波器實(shí)現(xiàn)電源測(cè)試自動(dòng)化
自動(dòng)微波測(cè)量系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
糧庫(kù)自動(dòng)化系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
SAE自動(dòng)駕駛分級(jí)標(biāo)準(zhǔn)自動(dòng)化系統(tǒng)分類(lèi)與定義重新修訂的資料概述
自動(dòng)駕駛汽車(chē)的分級(jí)標(biāo)準(zhǔn),其對(duì)自動(dòng)化的描述共有4個(gè)級(jí)別

解讀汽車(chē)從無(wú)自動(dòng)化到全自動(dòng)化六個(gè)級(jí)別的駕駛等級(jí)

SAE發(fā)布駕駛自動(dòng)化等級(jí)可視化圖表更新版
家庭自動(dòng)化能源測(cè)量系統(tǒng)

駕駛自動(dòng)化的定義與分類(lèi)
電源測(cè)試怎么自動(dòng)化?電源模塊自動(dòng)化測(cè)試系統(tǒng)如何實(shí)現(xiàn)?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論