 基于網絡冗余技術的DCS控制系統的設計
基于網絡冗余技術的DCS控制系統的設計
在自動化的許多領域,有效性的要求越來越高,因而對自動化系統的容錯水平的要求也變得越來越高,尤其在設備停機代價非常大的場合。為了滿足這些嚴格的要求,在DCS系統中通常采用冗余技術,這樣才能夠滿足這些領域所需要的安全性、可靠性和有效性的標準。
在DCS控制系統中,分布處理單元是系統關鍵的部分。當前這些分布處理單元的控制器往往是基于86系列CPU建構的,這種架構目前被廣泛采用。但是由于86系列分布處理單元的特點,導致現在的控制器處理單元存在很多的缺點,如放熱量大等。而且在封閉的環境中,這些問題始終很難解決。隨著很多低功耗技術的發展和低功耗控制器的出現,分布處理單元的CPU可以有更多的選擇,尤其是低功耗的控制器產生很少的熱量,且可以使系統的集成度更高。
無論是國內還是國外的DCS控制系統之間有多大區別,冗余技術在這些DCS控制系統中都被廣泛采用。DCS控制系統中主要采用了網絡冗余技術、分布處理單元冗余技術、IO卡件冗余技術、電源冗余技術等。
1、 DCS系統的模型
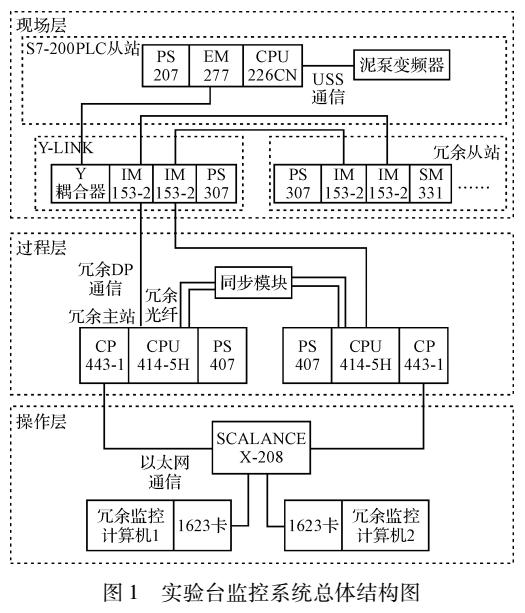
DCS控制系統是控制技術、計算機技術、通信技術及圖形顯示技術相結合的產物,其一般的體系結構見圖1。由圖1 DCS控制系統模型框圖可知,DPU指的是分布處理單元。DCS控制系統的體系結構分為3層:過程控制層、監控層和管理層。其中過程控制層是DCS系統控制的基礎,其設備的主要功能是控制接口、現場控制單元、檢測儀表和執行機構;監控層主要由監控計算機、高級操作站和接口裝置構成,主要負責操作監視、系統報警、趨勢顯示及系統診斷等功能;管理層主要由管理計算機組成,負責整個系統的管理工作。
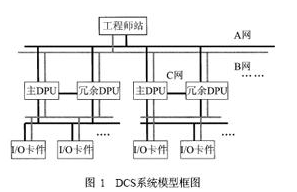
DCS控制系統的冗余設置大部分都與過程控制層和監控層有關,因此大部分的冗余技術都與過程控制層相關。下面結合最新的基于ARM控制器的分布式處理單元,對DCS控制系統中采用的冗余技術中的分布處理單元冗余和網絡冗余進行討論。
2、 基于ARM的分布處理單元結構
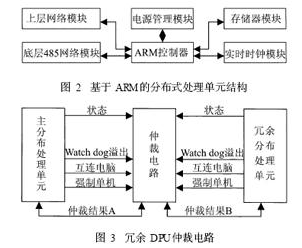
基于ARM的分布處理單元的結構框圖見圖2,這和一般的分布處理單元的結構非常相似。這里主要把處理單元分為6部分:ARM控制器、上層網絡模塊、電源管理模塊、存儲器模塊、低層網絡模塊和時鐘模塊。ARM控制器和存儲模塊組成了最基本的嵌入式系統,整個DCS控制系統的數據處理和控制策略都是在這里處理的。上層網絡模塊主要是指和管理層通信的主/冗余網絡和一個實現主/冗余分布處理單元進行數據交換的網絡,這部分的主要功能是完成管理層對DCS控制系統的實時檢測和實現主/冗余分布處理單元的數據冗余。底層的網絡模塊是由分為主次的2條485網絡組成,此模塊主要實現ARM控制器的I/O卡件之間的數據通信。存儲器模塊可分為兩部分,一部分用來管理存放操作系統,另一部分用來管理存放實時數據。電源模塊和時鐘模塊分別實現電源的管理和時鐘的管理。
3、 控制器冗余
分布式處理單元的冗余根據冗余度可以分為冗余度為1∶1和1∶n兩種情況。這在每個DCS廠家的產品中是不同的。這兩種方式各有優缺點。這里介紹的是冗余度為1∶1的冗余設置。
分布處理單元冗余度為1∶1,就是將2塊組態完全一樣的控制器設置成冗余方式。在投入運行時,若出現故障,兩分布處理單元之間能實現無擾動切換,保證系統的正常運行。
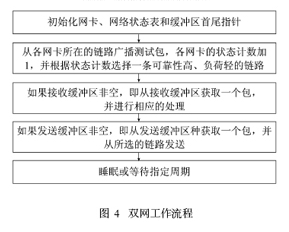
本系統所采用的分布處理單元均帶3個網絡接口,其中2個網口分別連接到A網和B網,實現各工作站點間的數據通信,第3個網口通過對等網數據連接子分布處理單元間(對等網數據現可選用光纖作傳輸介質),用來傳輸主、從分布處理單元之間的備份數據;分布處理單元之間的狀態信息由串口傳輸。冗余分布處理單元與網絡的連接見圖3。
冗余分布處理單元的工作原理:兩個分布處理單元硬件配置完全相同,內部裝有相同的操作系統,相同的組態軟件, 相同的組態信息。在同一時刻只有1個分布處理單元通過雙機交換卡接受過程信息并進行運算處理,最后產生控制結構去控制過程設備,此分布處理單元稱為主分布處理單元。同時冗余分布處理單元并沒有閑置,它在每一個工作周期都通過雙機之間的光纖對主分布處理單元所接受的過程信息和運算結果進行實時拷貝,這樣冗余分布處理單元始終與主分布處理單元同步。冗余分布處理單元同時檢測拷貝的信息是否完整,是否在所允許的容錯度內。一旦信息不完整或報錯,則說明主分布處理單元工作不正常。在這種情況下,冗余分布處理單元通過光纖將主分布處理單元旁路,同時切換為主分布處理單元繼續工作。切換時間選用最短的運算周期(幾十ms或更短),從而實現無擾動切換。等到主分布處理單元恢復正常后,冗余分布處理單元自動把控制權交還給主分布處理單元,轉為冗余備份狀態。
從圖3中可看出雙分布處理單元仲裁電路工作原理為將分布處理單元各自自身之診斷結果加到仲裁電路上,并讀取相應的仲裁結果,以確定自身之主輔狀態。通過編程,確定各狀態的優先級,由于雙分布處理單元均根據仲裁之結果確定各自之主輔狀態,故只要仲裁結果變化了,雙分布處理單元則自動進行切換。
4、 網絡冗余
在DCS控制系統中至少存在2個網絡,一個是管理層和控制層之間的通信網絡,另一個是過程控制層與底層I/O卡件層之間的485通信網絡。上層網絡主要的作用是實現管理層對控制層實時檢測,和對下層控制器的配置設置等任務。下層網絡是為了把I/O卡件采集的數據傳送到過程控制層,然后把控制層的控制數據傳送給I/O卡件。這2個網絡在DCS控制系統中的重要性是不言而喻的。
針對上層網絡模塊的冗余,當今的工業自動化領域出現了各種各樣的支持鏈路冗余功能的工業以太網交換機,它們解決了由節點故障導致網絡癱瘓的問題。為提高數據通信的整體可靠性和容錯性,本DCS控制系統也采用環形的網絡拓補結構。但是由于環形網本身固有的缺點是節點故障引起全網故障,因此數據通信鏈路的冗余技術應運而生。為了保證2層網絡的順利工作,2個網絡都采用1∶1的冗余設置。分布處理單元檢測到主網出現故障時,自動放棄從主網的端口通信,同時啟用冗余網的端口,將數據轉由冗余網發送 和接受。此時冗余網進入數據通信狀態,主網及時進行修補。雙環網技術實現了傳輸媒介的冗余,在TurboRing的基礎上進一步提高了系統的可靠性。但雙環網的管理和切換都比較復雜,本系統采用了一種簡單的方法。
對于網絡上的每1個節點,可能處于下述5種情況之一:
(1)在線聯網運行,系統至少有2個節點在運行;(2)在線單機運行,系統只有本地節點在運行;(3)離線單機運行,此節點的網卡存在且正常、但沒有上網;(4)離線單機運行,此節點的網卡存在,但出現故障;(5)離線單機運行,此節點不存在網卡。
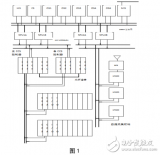
目前的網絡控制器都提供了命令、診斷、配置和狀態寄存器,通過讀寫這些寄存器,便可以區分上述5種情況。當系統運行時,各種因素都可能存在,為了在線反映網絡各節點的運行狀態,每個節點可以設置一張網絡狀態表,記錄各節點上每塊網卡的運行狀態。當某節點上1塊或2塊網卡的狀態改變時,其他節點應能在盡可能短的時間內知道。為此,每個節點的2塊網卡需要定時廣播1個測試包,表明該節點的網卡存在。其他節點收到此包時,修改網絡狀態表中此節點上相應網卡的狀態。然而在運行過程中,如果某節點的1塊網卡離線,它將既不能接收、也不能發送。而在此之前,它已在其他節點的網絡狀態表上登記了,其他節點將認為該網卡存在且正常,顯然沒有反映網卡運行的真正狀態。為了準確反映網卡的狀態,每個節點的2塊網卡定時廣播測試包的同時,將本節點的網絡狀態表中所有網卡狀態計數加1,直到最大值LIMIT。每當收到某節點的測試包時,將該節點相應網卡的狀態計數清為0。這樣,保證狀態數小于最大值LIMIT和定時廣播周期就可以在線實時監視網絡的運行,準確反映節點所處的狀態。在2個網絡之間還可以添加具有路由功能的網間傳輸設備,當2個網絡同時出現故障時,網間傳輸設備也能自動尋找可行路徑,組成1個環路,保持系統的正常通信。
對于測試包的廣播,只要本節點上的網卡在線運行,即從相應的鏈路發送,測試包發送完畢之后,根據網絡狀態表,可以選擇一條正常運行的節點數較少的,負荷較輕的鏈路,用于數據包發送。雙網的工作流程見圖4。
責任編輯:
-
控制器
+關注
關注
112文章
16398瀏覽量
178529 -
控制系統
+關注
關注
41文章
6635瀏覽量
110685 -
計算機
+關注
關注
19文章
7519瀏覽量
88202
發布評論請先 登錄
相關推薦
提高DCS控制系統電源可靠性的方案
多機冗余容錯在艦艇控制系統中的應用
舞臺自動控制系統設計及冗余技術

什么是DCS控制系統

DCS冗余技術簡介
DCS控制系統模件冗余電源的實現
現場總線冗余技術的DCS控制系統設計
基于PLC的泥沙輸送冗余控制系統





 工商網監
工商網監
評論