 采用μC/OS-II與LPC2210處理器的中央空調控制系統的設計
采用μC/OS-II與LPC2210處理器的中央空調控制系統的設計
社會的發展和人類生活水平的不斷提高,使人類對居住環境的要求也越來越高,因此中央空調系統的應用也越來越廣泛。中央空調系統改善了人們的居住環境,但同時也消耗了大量的能源。對于中央空調控制系統,目前的中央空調控制技術還以分散控制為主,每個控制器只能監控其所控制的中央空調機組的狀態,這不僅不利于整個系統的智能管理,而且浪費能源。有少數中央空調控制器生產廠商進行了少量中央空調集中化,網絡化控制的嘗試,但采用的技術比較落后,大多數通信距離較短,所能集中監控的中央空調的數目也少。 近幾年網絡技術越來越成熟,網絡安全、實時性、可靠性進一步提高,這使我們已經逐漸能夠將網絡技術應用到控制領域;同時,單片機技術發展訊速,很多單片機已經具有多功能、高速度、低功耗、低價格、大存儲容量和強I/O功能等特點,因此,本控制系統選擇了Philips公司ARM7處理器LPC2210,移植了實時操作系統μC/OS-II,系統運行穩定可靠。
1 空調系統簡介及控制要求
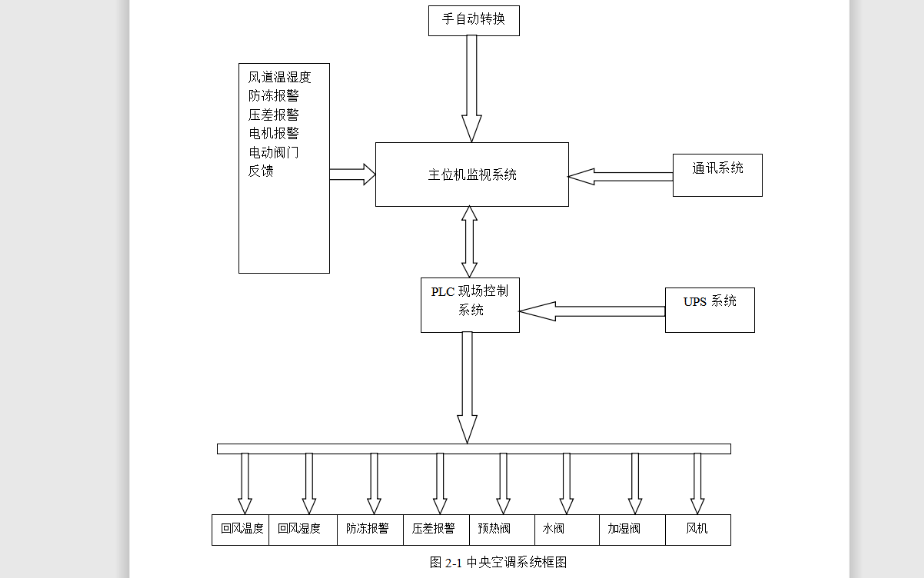
中央空調由集中制冷/加熱站和空調機組兩大部分組成。前者提供系統所需要的冷熱源,后者通過調節冷凍水/熱蒸汽的流量及空氣風量來調節溫度,調節加濕閥來調節房間的濕度。機組的控制任務是自動調節空氣溫濕度、風速、送風量及空氣的潔凈度。系統中所需檢測與控制的參量為:自動檢測新風、送風、回風及被控房間溫、濕度及正壓值,表冷器/加熱器的供、回水溫度;自動檢測送、回風機及故障報警;中低效過濾器壓差狀態及超差報警;根據室外空氣狀態和室內正壓值自動調節新風、回風、排風閥開度 ;根據被控參數及設定參數自動調節表冷器、加濕器的電動調節閥的開度[2-3].
2 現場控制器硬件結構
如圖1所示,整個系統可分為ARM處理器模塊、電源模塊、各總線接口模塊、存儲模塊、人機交互模塊、模擬量輸入輸出模塊及數字量輸入輸出模塊等。

主處理器選用Philips公司生產的ARM7芯片LPC2210,該芯片是基于支持實時仿真和跟蹤的ARM7TDMI-S CPU的微控制器,最高工作頻率可達60 MHz,內部帶有16 KB RAM,多達122個通用I/O口(可承受5 V電壓),具有兩個帶16 B收發FIFO的UART,兩個完全獨立的同步串行接口SPI等豐富的外設。本系統中,存儲模塊由擴展的2 MB NOR Flash(SST39VF160)與8 MB PSRAM(MT45W4MW16)構成,分別使用LPC2210外部存儲器接口的Bank0和Bank1地址空間;人機交互模塊包含鍵盤和LCD兩部分,顯示和設置空調機組的運行參數及狀態。控制器設有8個按鍵輸入,使用I2C接口的接盤與LED驅動芯片ZLG7290進行鍵盤掃描;從USB接口用于控制器與調試計算機的通信;控制平臺設計了以RTL8019AS芯片為核心的以太網接口電路,實現控制器與上位監控級計算機之間的通信;CAN總線接口可用于現場設備的通信;ISP接口、JTAG口為程序下載調試接口;A/D模塊采用LPC2210自帶的8路10位ADC轉換器,檢測各路溫度及濕度模擬量的輸入,構成反饋控制。D/A模塊的輸出信號作為比例放大器的輸入,控制各個調節閥門的開度大小,實現風量和流量控制。數字量輸入通道檢測風機的運行狀態及過濾網壓差報警信號;數字量輸出通道輸出風機、加濕器的開關控制信號。控制器通過對整個空調系統新風、回風的溫濕度、送風風機運行狀態、初中效過濾段的壓差等信號的采集,控制送風風機的變頻調速、加濕器的加濕、新風及回風閥門的開度、冷熱水閥的開度大小,以達到設定的空氣狀態[4].
3 現場控制單元的軟件設計
3.1 軟件層次與功能
μC /OS-II是一個完整的、可移植、可固化、可裁剪的占先式實時多任務內核。μC/OS-II絕大部分的代碼是用ANSI的C語言編寫的,包含一小部分匯編代碼,使之可供不同架構的微處理器使用。至今,從8位到64位,μC/OS-II已在超過40種不同架構上的微處理器上運行。μC/OS-II已經在世界范圍內得到廣泛應用,包括很多領域, 如手機、路由器、集線器、不間斷電源、飛行器、醫療設備及工業控制上。實際上,μC/OS-II已經通過了非常嚴格的測試,并且得到了美國航空管 理局(Federal Aviation Administration)的認證,可以用在飛行器上。這說明μC/OS-II是穩定可靠的,可用于與人性命攸關的安全緊要(safety critical)系統。除此以外,μC/OS-II 的鮮明特點就是源碼公開,便于移植和維護
控制器軟件由3部分組成:實時操作系統、硬件驅動程序和運行在操作系統之上的應用程序[5].實時操作系統采用源碼公開的μC/OS-II,基于其內核擴展的實時操作系統的整體結構如圖2所示。
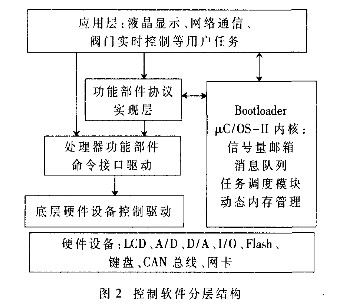
Bootloader的主要功能是初始化必要的硬件并啟動操作系統。應用軟件層實現中央空調的相關控制任務,包括初始化任務、故障處理任務、數據通信任務、數據采集任務、機組控制任務及顯示任務。底層硬件設備控制驅動層初始化微控制器與外圍部件管腳連接的配置,建立處理器與外圍功能電路之間的關聯,與具體硬件電路相關。功能部件命令接口驅動實現處理器各個功能模塊的運作機制,如串口、SPI、CAN等模塊,該層函數由上兩層調用。功能部件協議實現層提供各功能模塊初始化函數、讀寫函數以及中斷處理函數等。上兩層軟件設計與操作系統密切相關,利用操作系統管理控制任務、實現任務間的數據交互通信和延時等。
3.2 移植μC/OS-II
LPC2210的ARM7TDMI-S內核用ARM ADS1.2作為編譯器移植μC/OS-II.μC/OS-II的移植涉及到與處理器及編譯器相關的OS_CPU.H、OS_CPU_C.C和OS_CPU_A.S 3個文件。其包括以下內容:(1)設置OS_CPU.H頭文件中與處理器和編譯器相關的代碼,如整數、浮點數、堆棧等數據類型定義,打開或者關閉中斷函數設置,定義堆棧增長方向,任務切換的執行代碼。(2)用C語言在OS_CPU_C.C文件中編寫若干與操作系統相關函數,如任務堆棧初始化函數OSTaskStkInit();μC/OS-II在執行某些操作時調用的用戶函數,如OSTaskCreateHook()、OS-TaskDelHook()、OSTaskSwHook()、OSTaskStatHook()和OS-TimeTickHook()等。(3)在OS_CPU.ASM文件中用匯編語言編寫4個與處理器相關的函數:運行優先級最高的就緒任務OSStartHighRdy()、任務級的任務切換函數OSCtxSw()和中斷級的任務切換函數OSIntCtxSw()和中斷服務函數OS-TickISR()[5-6].
3.3 應用程序
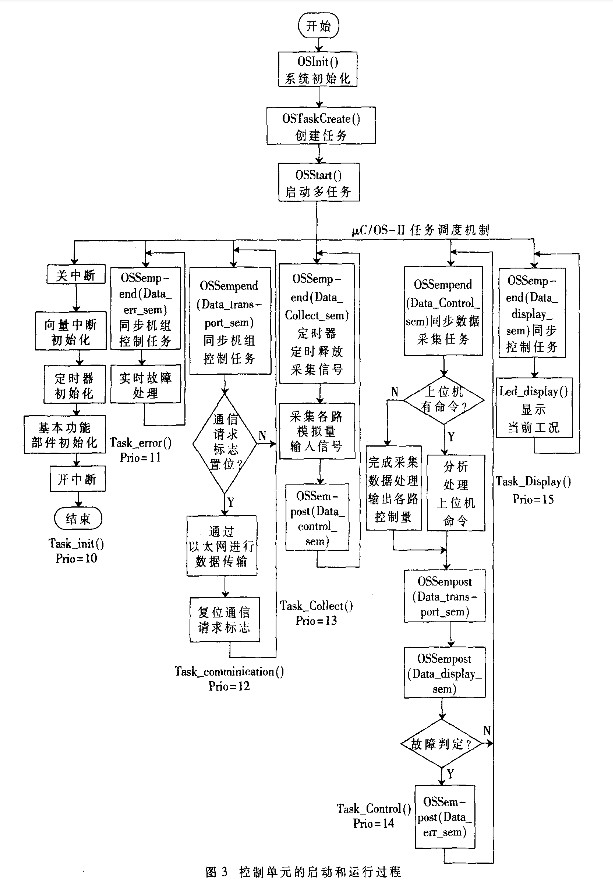
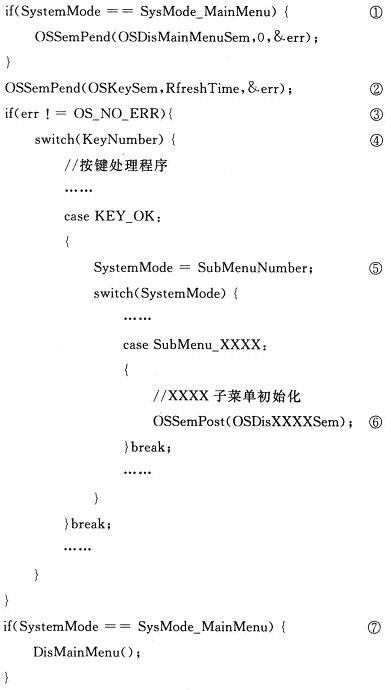
在μC/OS-II中,應用程序以任務形式存在,每個任務都是無限循環的,并處于以下五種狀態之一:休眠態、就緒態、運行態、掛起態和被中斷態[7].根據中央空調的控制要求,本系統由以下幾個任務來實現。
(1)定義5個基本的信號量用于任務之間的同步:故障信號量、通信信號量、定時采集信號、機組控制信號量和顯示信號量。
(2)初始化任務Task_init()具有最高運行優先級,優先級Prio=10,該任務完成處理器I/O接口的初始化,向量中斷分配與設置,定時器初始化以及I2C、串口等基本功能部件的初始化工作,為后繼任務的運行做準備,只運行一次。
(3)故障處理任務Task_error()為次優先級任務,優先級Prio=11.當獲得Data_err_sem信號后判斷機組故障的類型,按照預先的設定進行實時故障處理,并給出報警、提示故障原因。
(4)數據通信任務Task_comminication()的優先級Prio=12,當有數據傳送請求時便通過以太網與上位機進行通信,完成命令及數據的傳送。
(5)數據采集任務Task_collect()優先級Prio= 13,主要完成周期性地采集各路溫度模擬量、濕度頻率量和開關量信號的輸入,為機組控制任務提供運算數據。
(6)機組控制任務Task_control()是整個系統任務中的核心,優先級Prio=14.當獲得采集任務釋放的Data_Control_sem信號后,便對采集過來的各路溫濕度信號及開關量信號進行處理,輸出控制信號,完成對各個調節閥的控制;且當有故障發生時釋放故障信號量Data_err_sem.
(7)顯示任務Task_display()優先級最低,Prio= 15.當獲得顯示信號量Data_Display_sem時任務就緒,刷新機組當前的設置參數及運行狀態。
系統整體軟件流程圖如圖3所示。系統初始化后便建立各個運行任務,啟動多任務調度機制,在各個同步信號的協調下有序運行[8].
3.4 數據處理算法
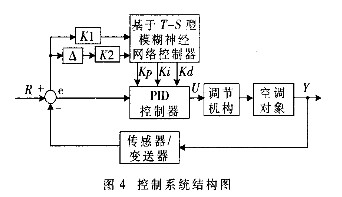
在機組控制任務Task_control()中需要對采集過來的各路模擬量及數字量信號進行處理,以得到合適的輸出控制信號,選取何種處理方法直接關系到控制器的控制品質。針對中央空調對象大慣性、大滯后、非線性等特性,常規PID控制無論在參數整定還是在控制精度或控制過程都存在不足[4,9].本系統采用基于T-S模型的模糊神經網絡[10]參數自整定PID控制方法,利用神經網絡經訓練后可以逼近任意非線性關系特性,并綜合了PID控制與模糊控制各自的優勢。圖4為控制系統結構圖[9],模糊神經網絡模塊根據誤差及其變換率實時地修改PID控制器的3個參數,使其處于最優狀態。圖5為基于T-S模型神經網絡結構圖[11].
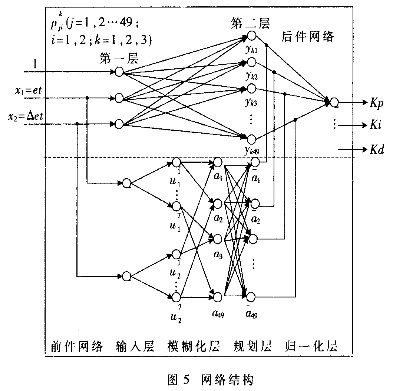
以溫控為例,網絡的輸入信號x1、x2分別是溫差及溫差變化率et、Δet,模糊論域分別定為[-20,20]、[-10,10],模糊子集均為:NB(負大)、NM(負中)、NS(負小)、ZE(零)、PS(正小)、PM(正中)、PB(正大),模糊規則49條,隸屬度函數為高斯函數。前件網絡輸入層直接將et、Δet送入到模糊化層計算其屬于各語言變量值模糊集合的隸屬度函數,規則層采用求積法計算出每條規則的適用度[10].后件網絡由3個結構相同的并列子網絡組成,輸出PID控制器的3個控制參數kp、ki、kd.系統采集常規PID控制器工作時et、Δet輸入數據及控制參數為訓練樣本,利用誤差反傳算法訓練網絡參數:連接權pkji、隸屬度函數中心值cij及寬度δij.試驗記錄表明訓練后的控制器的動態特性與靜態特性均優于傳統PID及單純模糊控制方法。
本中央空調現場控制器采用32位高性能ARM處理器,滿足了控制系統對實時監控能力和組網通信能力的要求,簡化了系統設計。嵌人式操作系統μC/OS-II的移植保證了系統的實時性,多任務運行特性使所開發的控制軟件運行穩定、可靠。
-
電源
+關注
關注
184文章
17769瀏覽量
250746 -
處理器
+關注
關注
68文章
19344瀏覽量
230230 -
控制器
+關注
關注
112文章
16397瀏覽量
178514
發布評論請先 登錄
相關推薦
μC/OS-II操作系統在3種處理器上的移植,你會哪一種???
μC/OS-II操作系統在各種處理器上的移植
ARM處理器LPC2210在腦血氧監測儀中的應用
基于Profibus總線的中央空調控制系統
實時操作系統μC/OS-II 在LPC2210 上的移植研究
實時操作系統μC/OS-II在LPC2210上的移植
μC/OS-II 在LPC2210上的移植實現
uCOSII在LPC2210上的移植詳解
PLC在中央空調控制系統中的應用
基于μC/OS-II的顯示控制系統開發
如何使用PLC實現中央空調控制系統的設計
使用PLC實現中央空調控制系統的設計論文






 工商網監
工商網監
評論