

系統概述
新能源發電成為21世紀解決能源危機的必經出路,光伏發電、風電、核電等新能源發電是目前新能源發電研究的幾大方向。這幾種新能源各有各的特點,我們選擇了最靠近我們的光伏發電作為研究出發點。
目前光伏發電并網技術的研究愈加深入成熟,而關于光伏發電技術的具體應用環節還是有著許多發揮余地。光伏發電的優點是清潔安全、分布相對較為均勻、可持續利用。同時光伏發電也存在自己的問題,其中一個很重要的問題是光伏發電需要做的是收集輻射到地表的太陽能,這個環節需要占用大量的空間,這個問題使光伏發電的應用有著自己的特點。現在大多數的并網系統都是采用DSP控制, DSP往往靠一些特殊的指令處理復雜算法,這些指令局限于DSP控制器設計人員的預知范圍,而在FPGA中,用戶可以自由定義各種IP核,實現一些高效的復雜算法,由于與MATLAB在系統設計上有對應接口,設計起來也較為方便。
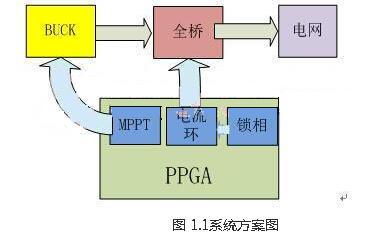
本系統設計的光伏逆變系統,采用了FPGA作為主控芯片,控制BUCK做最大功率跟蹤,以及采用一個橋式電路,通過變壓器,將模擬的光伏電池板上的電能輸出到電網上。 系統框架圖如下所示:
2 電路與程序設計
這里分模塊對電路各結構進行介紹,介紹內容包括電路拓撲、控制算法以及測量回路。系統主要可以分為兩部分,以拓撲來分,前端的BUCK主要實現最大功率跟蹤(MPPT)功能,后級的全橋通過鎖相、電流環反饋實現電能輸出。
2.1 MPPT設計
光伏電池板的輸出電壓有著很寬的工作范圍,而且可以根據需要進行光伏板的串并聯,我們在模擬光伏電池板工作時選取了額定電壓為60V、額定功率100W的光伏電池板。為了保證實驗安全,輸出電壓控制在36V附近,然后通過變壓器輸送到電網去。出于以上 考慮,我們選擇了Buck拓撲來做最大功率跟蹤設計。
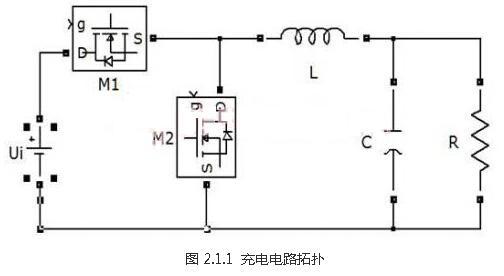
基本的Buck拓撲中采用了二極管作為續流通路。我們的電路輸出側工作在低壓大電流的條件下,如果采用基本的buck拓撲,在二極管上會有很大損耗,極大的影響了效率。為了提高效率,我們采用Mosfet代替續流二極管,使續流的Mosfet和主開關管工作在互補工作狀態,替代了續流二極管的作用,極大地提高了效率。
2.1.1工作原理
電路的拓撲結構如下:
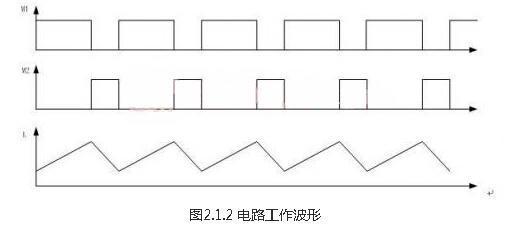
電路工作主要波形如下:
假設條件:
電感電流連續;
輸出濾波電容兩端電壓恒定。
工作過程:
開關管M1開通時,開關管M2關斷:電流經由開關管M1、電感L向負載供電,同時向電容充電。電感L在正向電壓作用下,電流線性上升。
開關管M1關斷時,開關管M2導通:電感L電流連續,電感電流不能突變,電流經由開關管M2、電感L這個環路流通。電感L承受反壓,電感電流線性減小。電容放電,向負載提供電流,保證負載電流穩定。
2.1.2理論公式
由電感L上的伏秒平衡可推得電路的電壓比M:
2.1.3 電路主要器件參數計算
Buck電路器件的核心是濾波電感的設計,我們關于電路器件的參數設計是圍繞此展開的。
濾波電感的工作參數:
最大平均工作電流:2.77A
由于通過電感的電流很大,電感很容易飽和。我們直接選取了實驗室最大尺寸的磁芯EE40。由于繞制電感時,實驗室最粗的線徑為0.71mm,我們只有選擇0.71mm。由于繞制電感時,并繞的股數不能過多。考慮到模型電路連續工作時間不會很長,我們選取了較大的漆包線電流密度經驗值6~8A。我們選擇5股并繞,由公式計算0.71*0.71*5*8A=20.164A。這個設計值勉強能滿足設計要求。
2.3.5 測量電路設計
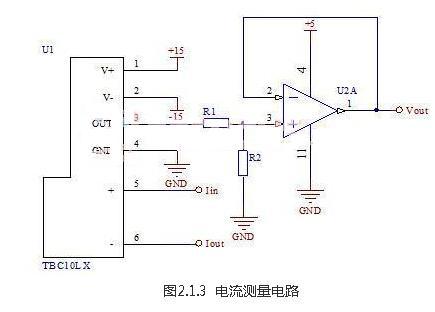
電流測量電路設計
電流測量的可供選擇方案很多,常用的是運用采樣電阻測量電流和電流霍爾測量電流方案。
系統的充電回路的過流量很大,采用電阻測量電流時,電阻發熱會很大,有明顯溫升,采樣電阻的阻值不穩定,測量值誤差較大。由于控制回路對采樣電流測量的要求較高,這種測量方案不適宜。
我們選擇了霍爾電流測量電流的方案,霍爾電流測量方案同時還可以實現可供選擇的型號為TBC5LX、TBC10LX、TBC15LX等。其中TBC10LX的測量電流最大值為30A,恰好可以滿足我們測量需求。
霍爾電流傳感器輸入電流量,輸出電壓值。輸出電壓為4V/10A,考慮到AD采樣輸入電壓范圍,電流采樣后級加入同相放大電路做信號調理,實現信號電壓匹配。
考慮到對控制器的AD采樣端口的保護,在同相放大電路中選取了單5V供電的軌到軌運放,限制了輸出電壓,起到了控制器采樣端口的保護作用。
電流測量電路的電路圖如下:
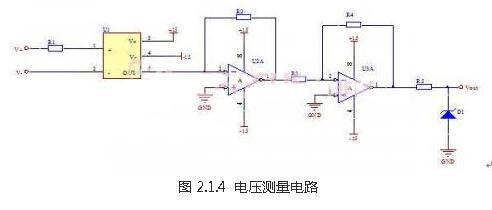
電壓測量電路設計
電壓常用的測量方案是分壓電阻測量方案和電壓霍爾測量方案。
由分壓電阻測量電壓隔離需要使用線性光耦,測量電路會復雜些。使用霍爾測量電壓更加簡潔。我們選擇了電壓霍爾測量電路。
電壓霍爾輸出的是電流信號,可以直接通過接電阻轉換成電壓信號。這種方案很容易受到負載效應的影響,測量精度差。電壓霍爾的輸出信號可以通過I-V轉換電路和反向電路轉換成與AD采樣端口電壓匹配的信號。
由于設計的電壓霍爾測量電路的信號中存在負壓信號,需要雙電源供電運放,而雙電源供電的軌到軌運放不常見。為了保護控制器的AD采樣端口,在電壓霍爾測量電路的輸出端加入了電壓鉗位電路,保護控制器的AD采樣端口。
電壓測量電路:
2.3.6 電路控制策略
充電控制主要實現MPPT跟蹤和蓄電池充電保護兩個功能,在允許范圍內應保證可以從光伏電池側獲得最大功率。
MPPT控制策略采用改進的擾動觀察法[5]進行最大功率點跟蹤。BUCK輸出電壓與輸入電壓關系為 ,通過調節BUCK電路的占空比可以調節輸出電壓,進而改變輸出功率,光伏電池電特性見圖2.3.6.1。
,通過調節BUCK電路的占空比可以調節輸出電壓,進而改變輸出功率,光伏電池電特性見圖2.3.6.1。
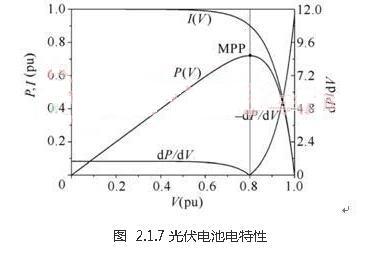
傳統的擾動法很難實現步長的自設定,要使系統具備比較優越的性能,就要在非峰值點附近要增大調整步進,在非峰值點附近要減小步進。通過改變步進,然后測得輸出功率變化量即可以知道步進變化對輸出功率的影響。即輸出電壓與功率的斜率,峰值點處得斜率為零,大處,說明離峰值點較遠,可以增大步進,同理小處離峰值點近,應減小步進,將步進整定為即可實現步進自整定,由于存在斜率正負的問題只需取。
為了優化控制系統,由于在電壓很低處輸出功率很小,可以適當增大步進,加速系統啟動過程。在穩態時應給一個小擾動,使峰值發生變化時也能跟蹤到新的峰值點。如果系統出現故障或者出現過壓過流,則退出MPPT控制系統。控制流程見圖2.3.6.1 。
上述改進型BUCK電路如果采用兩個MOSFET驅動互補的方式,除了降低損耗外還可以達到一些比較好的結果,比如不用考慮電流續流問題,因為電流可以在電容上倒流。但反相電流增加了開關損耗和導通損耗,只要電流倒流產生的損耗比通過傳統BUCK電路二極管管壓損耗小,整個系統相對來說損耗是減小的。推導過程和傳統算法一樣[6],只是電感電流可為負。由于IR2111單路PWM波輸入時,可以輸出帶死區上下管驅動信號,在控制策略上只需要控制單路PWM輸出的占空比即可。
2. 2 逆變器設計
逆變器的拓撲如下圖所示,通過控制通過電感上面的電流信號可以控制系統的輸出功率、功率因素以及相應的諧波成分。目前簡單的控制算法是電壓外環加電流內環PI控制。復雜的有帶FIR濾波的重復控制、矢量控制(三相)等等。本控制系統采用傳統的電壓電流環控制方法,通過鎖相查表的方式獲取波形數據,針對電網需求可以作一定量的無功補償。
2.2.1逆變器參數選取
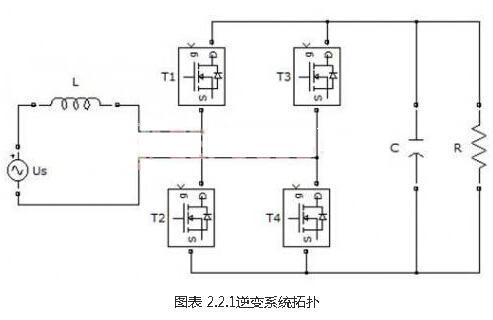
單相逆變器由直流側、逆變橋及輸出濾波組成,單相逆變器簡化拓撲如圖2.2.1所示。逆變器控制模型中,參考正弦波 和三角波比較得到的脈沖去控制各功率開關器件。由于開關狀態是不連續的,分析可采用狀態平均法,即用變量的平均值代替其瞬時值,從而得到連續狀態空間平均模型。
和三角波比較得到的脈沖去控制各功率開關器件。由于開關狀態是不連續的,分析可采用狀態平均法,即用變量的平均值代替其瞬時值,從而得到連續狀態空間平均模型。
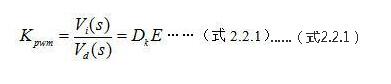
由于逆變器采用單相橋式電路,可以采用單極倍頻調制方式的,由狀態平均法分析可以得到直流電源電壓與A點電壓之間的關系式2.2.1,其中為采樣時刻的占空比,E為直流電源電壓。
為了將SPWM波的諧波分量濾除,在逆變器的輸出端加了LC濾波器,從而得到正弦交流信號,A、B兩點的電壓之間的傳遞函數可以寫成式2.2.2,其中r很小,電路設計時如果繞制電感內阻相對負載電阻很小,則可以忽略這個量。

交流電感的選擇主要考慮抑制電流紋波和滿足動態電流波形品質,同時應盡量減小電感,減小系統體積。
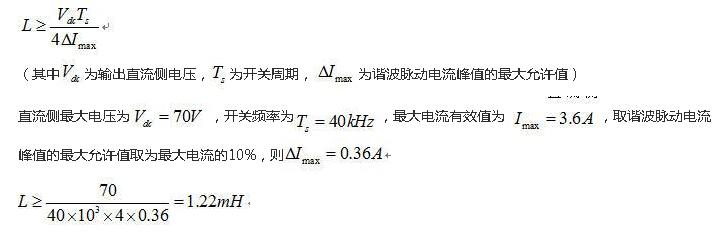
滿足抑制電流紋波要求,電感的選擇應滿足:
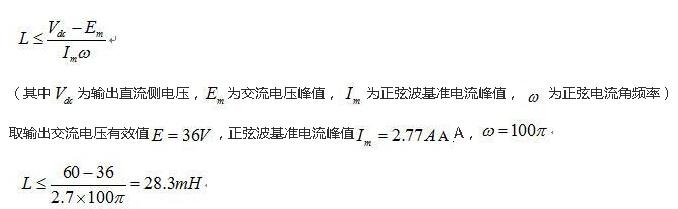
滿足快速跟蹤基準電流要求,電感應滿足:
考慮到實際電感設計,系統最終設計得出的電感為:
2.2.2 逆變器控制程序
系統的控制由在FPGA中完成。在FPGA中搭建一些硬件模塊,設計PWM的IP核,以及ADC的控制接口,然后通過片上控制器完成系統代碼程序。上電后先對系統各部分的初始化,然后進入循環,掃描按鍵,執行顯示程序。如果需要注入無功補償,通過系統的人機交互界面可以完成。
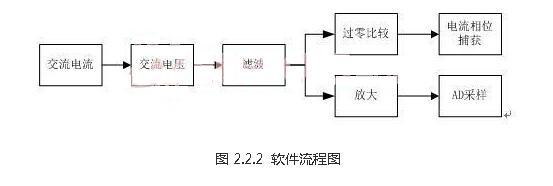
系統的控制主要在三個中斷函數中進行。在Timer7的溢出中斷服務函數中完成電流大小的控制,首先進行電流的檢測,測得的量可以通過主函數中的顯示程序執行顯示功能。由于采樣頻率較高,然后通過PI調節可以瞬時地完成相應電流輸出。完成測量后進行電流或電壓的PI調節,輸出一個占空比指令。在采到過零比較輸出的上升沿后觸發邊沿中斷。由于改變DDS的頻率控制字可以同時完成相位和頻率的跟蹤,因而用PI調節可以將相位鎖住在某個點上。DDS中斷中主要完成掃描正弦表,進行DDS相位累加。輸出功率通過保持直流母線上的電壓,可以知道輸出電流指令大小。系統軟件流程圖如圖2所示。
2.2.3電路設計
這部分描述逆變器除FPGA之外的電路原理圖,標明具體參數及采用器件。
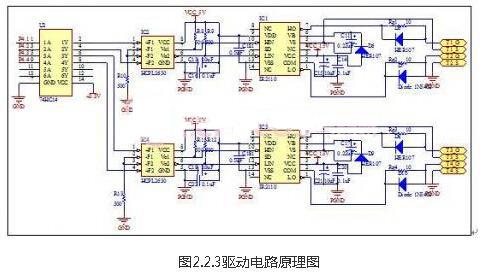
2.2.3.1驅動電路設計
驅動電路采用IR2110來驅動開關管,由于控制信號要和主電路要電氣隔離,故這里選用74HC14反相器和HCP2630隔離光耦,具體電路圖如下圖所示:
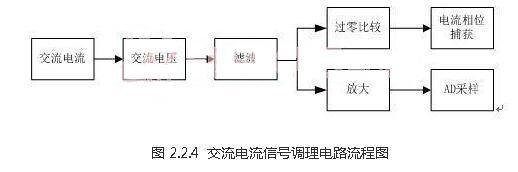
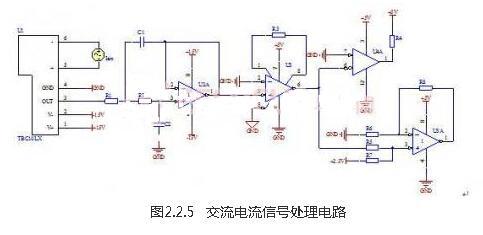
2.2.3.2交流電流信號調理電路設計
交流電流信號的調理電路的處理流程如下圖所示:
濾波電路的設計:設定截止頻率為開關頻率的1/5以下,通過Filter Solution軟件給出二階濾波器電路,結合實際器件,最終的濾波截止頻率為:

實際電路圖如下:
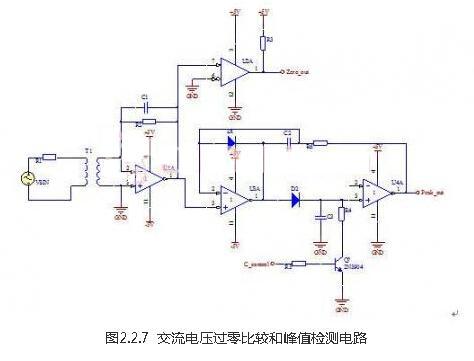
2.2.3.3交流電壓信號調理電路設計
交流電壓信號需要得出峰值和相位,信號處理流程如下:
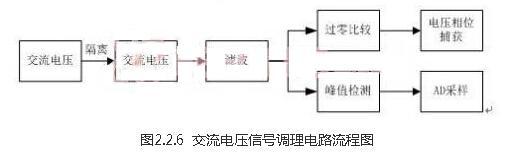
實際采用電路原理圖如下:
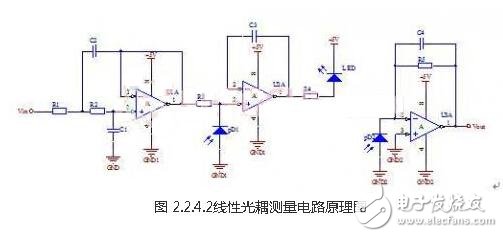
2.2.3.4 直流電壓測量電路設計
輸出信號連接到下圖所示的線性隔離光耦電路,通過在HCNR201光耦輸入輸出配置運放可以實現線性放大。光耦主要是實現主電路與控制器的電氣隔離,從而保護FPGA的安全。
-
FPGA
+關注
關注
1638文章
21867瀏覽量
610468 -
芯片
+關注
關注
459文章
51808瀏覽量
431806 -
太陽能
+關注
關注
37文章
3474瀏覽量
115218
發布評論請先 登錄
相關推薦





 工商網監
工商網監

評論