") 探討壓電MEMS微執(zhí)行器技術(shù)現(xiàn)在及發(fā)展趨勢(shì)
探討壓電MEMS微執(zhí)行器技術(shù)現(xiàn)在及發(fā)展趨勢(shì)
壓電MEMS通過(guò)單片即可實(shí)現(xiàn)微執(zhí)行、能量收集、傳感和無(wú)線通信,是應(yīng)用潛力巨大的熱點(diǎn)技術(shù)。壓電MEMS微執(zhí)行器能夠精確、自主地執(zhí)行復(fù)雜動(dòng)作如直線、旋轉(zhuǎn)、加速度、鉗動(dòng)等,以此完成對(duì)極微小器件與結(jié)構(gòu)的納米尺度精確操作。因此,壓電MEMS微執(zhí)行器不但能夠滿足集成微系統(tǒng)(IMS)對(duì)自測(cè)試性、微定位性和片上操控性的嚴(yán)苛要求,同時(shí)能夠滿足集成微系統(tǒng)對(duì)輸出力矩/體積效能比、響應(yīng)速度、分辨率、功耗、集成度方面的需求。
2015年開始,以集成微系統(tǒng)任務(wù)需求為牽引,通過(guò)問(wèn)題定位、技術(shù)分解,確立了基于PZT材料的MEMS微執(zhí)行器研究,目前取得的研究進(jìn)展包括以下幾個(gè)方面:壓電 MEMS 多自由度微振動(dòng)臺(tái)技術(shù)、MEMS慣性傳感器自標(biāo)定技術(shù)、MEMS壓電微馬達(dá)技術(shù)與PZT材料與微執(zhí)行器長(zhǎng)期穩(wěn)定性研究。
1 壓電MEMS多自由度微振動(dòng)臺(tái)技術(shù)
壓電MEMS微執(zhí)行器的設(shè)計(jì)難點(diǎn)包括了大位移與低驅(qū)動(dòng)電壓之間的制約、驅(qū)動(dòng)負(fù)載功率與執(zhí)行器薄型化之間的制約、不可避免的工藝誤差帶來(lái)的性能退化。針對(duì)上述性能提升難點(diǎn),在不斷的摸索過(guò)程中形成和發(fā)展了位移放大機(jī)構(gòu)設(shè)計(jì)、疊加模態(tài)去耦設(shè)計(jì)、負(fù)載帶寬優(yōu)化等相關(guān)技術(shù)。同時(shí),根據(jù)多輪次的流片與設(shè)計(jì)、版圖相互調(diào)整的摸索經(jīng)驗(yàn),完成壓電多自由度微振動(dòng)臺(tái)數(shù)學(xué)模型研究,建立工藝參數(shù)與器件性能的映射關(guān)系,同時(shí)結(jié)合器件設(shè)計(jì)優(yōu)化,實(shí)現(xiàn)器件設(shè)計(jì)與工藝制備的協(xié)同優(yōu)化,獲得壓電微執(zhí)行器穩(wěn)定工藝流程與優(yōu)異器件性能。
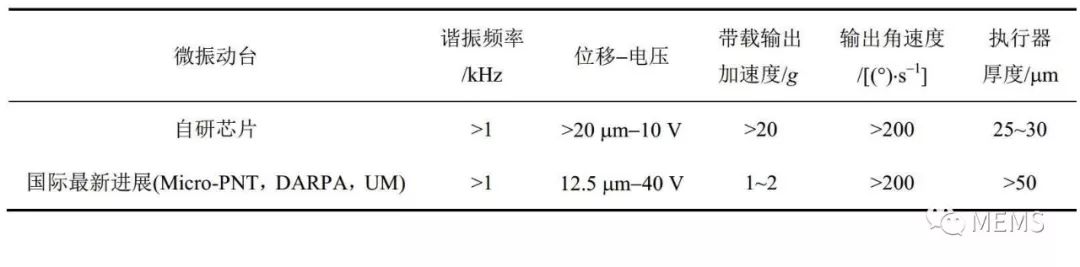
如圖1所示,制得的多自由度微振動(dòng)臺(tái)芯片,在位移/電壓、執(zhí)行器厚度方面處于國(guó)際領(lǐng)先水平。而微執(zhí)行器薄型化、低電壓、位移等指標(biāo)的進(jìn)步對(duì)于后續(xù)集成和應(yīng)用具備重要意義。指標(biāo)對(duì)比見表1。
圖1 (a)不同結(jié)構(gòu)微振動(dòng)臺(tái)與(b)動(dòng)態(tài)測(cè)試結(jié)果
表1 微振動(dòng)臺(tái)性能參數(shù)及對(duì)比
2 MEMS慣性傳感器自標(biāo)定技術(shù)
MEMS慣性傳感器自標(biāo)定技術(shù)主要通過(guò)在MEMS慣性傳感器外部集成壓電微振動(dòng)臺(tái)和集成陣列化檢測(cè)結(jié)構(gòu)實(shí)現(xiàn)閉環(huán)控制能力,可以提供多軸高精度動(dòng)態(tài)運(yùn)動(dòng)特征,從而實(shí)現(xiàn)MEMS慣性傳感器使用前原位無(wú)自損標(biāo)定。通過(guò)對(duì)MEMS慣性傳感器零位與標(biāo)度因子的漂移、非敏感軸互耦誤差、陀螺儀加速度靈敏度等參數(shù)獲取,在使用前對(duì)長(zhǎng)期漂移的誤差進(jìn)行主動(dòng)補(bǔ)償,能夠從根本上降低對(duì)傳感器長(zhǎng)期穩(wěn)定性的要求,大幅度降低其成本,極大地拓展MEMS慣性傳感器應(yīng)用領(lǐng)域。同時(shí),這種原位自標(biāo)定技術(shù)具備通用性,能夠?qū)崿F(xiàn)對(duì)不同類型與結(jié)構(gòu)的MEMS慣性傳感器包括加速度計(jì)、陀螺儀以及IMU的無(wú)損原位自標(biāo)定。
基于多自由度微振動(dòng)臺(tái)的進(jìn)展,目前已完成MEMS加速度計(jì)和陀螺儀的自標(biāo)定流程驗(yàn)證。并采用光學(xué)閾值檢測(cè)方法,解決陣列化高精度貼片工藝技術(shù)與微弱電流檢測(cè)電路設(shè)計(jì)制備問(wèn)題,可實(shí)現(xiàn)多自由度微振動(dòng)臺(tái)陣列化高精度檢測(cè),下一步期望實(shí)現(xiàn)10 nm的振動(dòng)位移精度檢測(cè)。光學(xué)檢測(cè)樣片與檢測(cè)量隨位移的變化如圖2所示。
圖2 光學(xué)閾值檢測(cè)(a)陣列化結(jié)構(gòu)樣片與(b)檢測(cè)量隨位移的變化
圖3 自標(biāo)定模塊三維集成方案(a)剖面圖與(b)三維圖
圖3是目前設(shè)計(jì)的自標(biāo)定模塊三維集成方案,能實(shí)現(xiàn)微振動(dòng)臺(tái)、檢測(cè)結(jié)構(gòu)、被標(biāo)定MEMS傳感器之間的機(jī)械結(jié)構(gòu)疊層與互聯(lián),體積小于1立方厘米。圖4為已完成的加速度計(jì)與微振動(dòng)臺(tái)的集成樣品及測(cè)試情況,解決了機(jī)械敏感結(jié)構(gòu)集成應(yīng)力問(wèn)題, 有望達(dá)到小于100 x 10^6的自標(biāo)定精度,徹底解決多種MEMS慣性傳感器長(zhǎng)期穩(wěn)定性問(wèn)題。
圖4 加速度計(jì)與微振動(dòng)臺(tái)集成(a)初步集成樣片、 (b)封裝樣品與(c)測(cè)試結(jié)果
3 MEMS壓電微馬達(dá)技術(shù)
如圖5所示,壓電MEMS微執(zhí)行器在薄型化、低電壓方面的進(jìn)展提供了新的馬達(dá)發(fā)展思路,能夠在極扁平化集成空間中圓片級(jí)集成微執(zhí)行器(電機(jī))、轉(zhuǎn)子、狀態(tài)檢測(cè)結(jié)構(gòu),有望徹底解決傳統(tǒng)超聲馬達(dá)固有的體積大、裝配一致性差、無(wú)法與其他結(jié)構(gòu)高密度集成等問(wèn)題。
圖5 微馬達(dá)執(zhí)行器顯微結(jié)構(gòu)
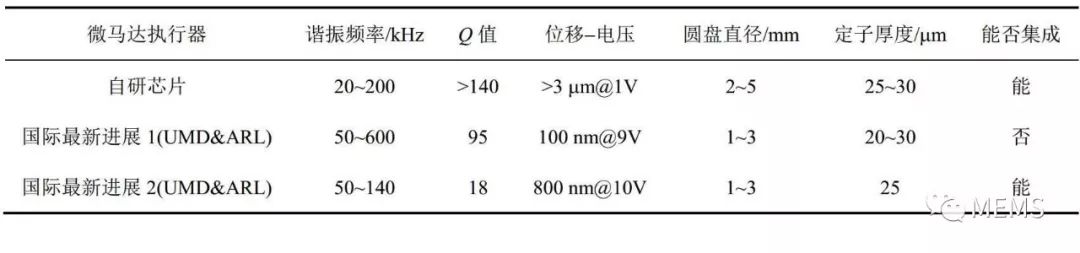
目前,國(guó)際上現(xiàn)有的研究表明平面可集成微馬達(dá)執(zhí)行器尚存在驅(qū)動(dòng)效率(Q值)低、負(fù)載驅(qū)動(dòng)能力(位移或輸出力矩)不足等問(wèn)題。針對(duì)上述問(wèn)題,采用新穎的設(shè)計(jì)思路,創(chuàng)新提出儲(chǔ)能支撐結(jié)構(gòu)設(shè)計(jì)、異形電極結(jié)構(gòu)等新型設(shè)計(jì)。從圖6所示微馬達(dá)執(zhí)行器樣片的測(cè)試結(jié)果可以看出,設(shè)計(jì)方法切實(shí)有效,微馬達(dá)執(zhí)行器不但在位移/電壓、Q值兩項(xiàng)指標(biāo)上國(guó)際領(lǐng)先,而且線性度與穩(wěn)定性優(yōu)異,能夠?qū)崿F(xiàn)對(duì)負(fù)載的步進(jìn)旋轉(zhuǎn)驅(qū)動(dòng),在輸出力矩、行波驅(qū)動(dòng)效率、集成電壓等方面潛力極大。具體參數(shù)對(duì)比見表2。
同時(shí),提出集成化旋轉(zhuǎn)步進(jìn)檢測(cè)方案,有望進(jìn)一步解決極扁平化集成需求、高定位精度需求,實(shí)現(xiàn)檢測(cè)結(jié)構(gòu)與微馬達(dá)微執(zhí)行器、轉(zhuǎn)子的共形集成,期望達(dá)到±0.2°的旋轉(zhuǎn)檢測(cè)精度。
圖6 微馬達(dá)執(zhí)行器
表2 微馬達(dá)執(zhí)行器性能參數(shù)及對(duì)比
4 PZT材料與微執(zhí)行器長(zhǎng)期穩(wěn)定性研究
長(zhǎng)期穩(wěn)定性是微執(zhí)行器的重要運(yùn)行指標(biāo),基于PZT材料的MEMS微執(zhí)行器的長(zhǎng)期穩(wěn)定在國(guó)內(nèi)尚未有相關(guān)文獻(xiàn)報(bào)道。影響微執(zhí)行器長(zhǎng)期穩(wěn)定的最主要因素在于設(shè)計(jì)和PZT材料特性, 如何有效的利用PZT材料特性,通過(guò)設(shè)計(jì)方法優(yōu)化,提高微執(zhí)行器長(zhǎng)期穩(wěn)定性需要在多輪次流片迭代過(guò)程中不斷分析總結(jié)。通過(guò)界面調(diào)控、組分摻雜、制備優(yōu)化、極化方式優(yōu)化等一系列配合材料性能參數(shù)的設(shè)計(jì)方法改進(jìn),獲得了壓電材料兩個(gè)方面性能的優(yōu)化:首先是溫度穩(wěn)定性提升,降低了對(duì)工藝溫度的限制,實(shí)現(xiàn)了器件性能穩(wěn)定度的提升;另外,通過(guò)調(diào)控鐵電回線,獲得了微執(zhí)行器執(zhí)行能力的提升。結(jié)果如圖7所示。
圖7 (a)材料溫度穩(wěn)定性測(cè)量與(b)鐵電回線調(diào)控
現(xiàn)階段微執(zhí)行器疲勞測(cè)試結(jié)果如圖8所示,能夠獲得振動(dòng)次數(shù)高于10^7的穩(wěn)定工作狀態(tài)。目前正在進(jìn)行多材料體系界面機(jī)理研究,探索影響執(zhí)行器疲勞性能的因素,為進(jìn)一步提高微執(zhí)行長(zhǎng)期穩(wěn)定性提升奠定基礎(chǔ)。
圖8 微執(zhí)行器疲勞測(cè)試結(jié)果
科學(xué)意義
本工作以壓電MEMS微執(zhí)行器設(shè)計(jì)為基礎(chǔ),以全集成MEMS工藝為手段,制備出性能優(yōu)異的MEMS微執(zhí)行器,掃除了MEMS微執(zhí)行器可能帶來(lái)的驅(qū)動(dòng)能量耗散、效率不足、力矩不夠等缺點(diǎn),填補(bǔ)了集成微系統(tǒng)的執(zhí)行器解決方案空白。在國(guó)內(nèi)打破了PZT材料與MEMS技術(shù)融合的設(shè)計(jì)與工藝瓶頸,發(fā)展出包括“MEMS微執(zhí)行器設(shè)計(jì)與制備、集成化閉環(huán)檢測(cè)控制、多結(jié)構(gòu)集成”的壓電MEMS執(zhí)行器模塊能力,率先推進(jìn)壓電MEMS器件設(shè)計(jì)、制備、測(cè)試標(biāo)準(zhǔn)化、批量化技術(shù),為其應(yīng)用奠定基礎(chǔ)。
展望
在進(jìn)一步提高M(jìn)EMS微執(zhí)行器性能的基礎(chǔ)上,深入研究集成化閉環(huán)檢測(cè)控制技術(shù)、多結(jié)構(gòu)集成技術(shù),實(shí)現(xiàn)慣性傳感器原位自標(biāo)定模塊與壓電微馬達(dá)模塊。一方面,慣性傳感器原位自標(biāo)定模塊將會(huì)帶來(lái)MEMS慣性傳感器領(lǐng)域的變革,打破傳統(tǒng)的自標(biāo)定模式與高成本傳感器芯片優(yōu)化模式,不僅是傳統(tǒng)高精度高穩(wěn)定性高成本MEMS慣性傳感器的替代品,而且發(fā)展出一系列新型應(yīng)用和變革,包括提供慣導(dǎo)系統(tǒng)的新設(shè)計(jì)自由度、導(dǎo)航定位、運(yùn)動(dòng)載體控制等系統(tǒng)架構(gòu)變革,能夠降低慣性傳感器乃至慣導(dǎo)系統(tǒng)的維護(hù)成本,延長(zhǎng)維護(hù)周期。另一方面,壓電微馬達(dá)技術(shù)由于具備低電壓低功耗、高集成度、高精度等優(yōu)點(diǎn),將廣泛應(yīng)用于微動(dòng)作控制部件、微機(jī)械裝配維修、納米定位等方面。
-
mems
+關(guān)注
關(guān)注
129文章
3934瀏覽量
190678 -
執(zhí)行器
+關(guān)注
關(guān)注
5文章
378瀏覽量
19366
原文標(biāo)題:壓電MEMS微執(zhí)行器技術(shù)研究進(jìn)展
文章出處:【微信號(hào):MEMSensor,微信公眾號(hào):MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
探討全球MEMS傳感器發(fā)展趨勢(shì)
TPMS技術(shù)與發(fā)展趨勢(shì)
藍(lán)牙技術(shù)未來(lái)的發(fā)展趨勢(shì)
靈動(dòng)微對(duì)于未來(lái)MCU發(fā)展趨勢(shì)分析
探討智能視頻分析技術(shù)的應(yīng)用現(xiàn)狀與發(fā)展趨勢(shì)
mems概況及發(fā)展趨勢(shì)
基于壓電陶瓷微位移執(zhí)行器的精密定位
MEMS微執(zhí)行器技術(shù)現(xiàn)狀與未來(lái)展望
基于PZT材料的MEMS微執(zhí)行器的幾種技術(shù)解析

壓電MEMS微執(zhí)行器的設(shè)計(jì)方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論