

引言
本文針對礦用永磁操動機構饋電開關智能控制器采用的鉛酸蓄電池在充電過程中存在充電過度、充電不足、電池過熱和充電速度慢等諸多問題,提出了一種以atmega16 單片機為核心的智能充電器設計方案。采用了基于sugeno 推理的模糊PID 控制算法,提高了充電器的充電速度,減少了電池損耗,實現了對鉛酸蓄電池充電過程的智能化控制。
目前礦用永磁操動機構饋電開關智能控制器采用鉛酸蓄電池作為備用電源。傳統的鉛酸蓄電池充電方法有恒流限壓充電和恒壓限流充電,但充電效果都不是很理想,一方面這些方法充電時間過長,溫升過快。另一方面,充電過程中存在過充和欠充現象。專家研究表明:鉛酸蓄電池充電過程對其壽命影響最大,過充電、充電不足以及溫升都是引起電池故障的主要原因。
基于以上原因,系統根據蓄電池的充電特性,采用基于sugeno 推理的模糊PID 控制算法,設計了以atmega16 單片機為核心的智能充電器,它能夠實時采集電池充電過程中的電流、電壓、溫度等模擬量,使充電始終在最佳狀態下進行,實現了高效、快速、無損的充電過程。
1 系統總體結構設計
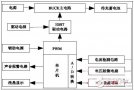
系統選取ATMEL 公司生產的 atmega16 單片機作為核心控制芯片。總體結構包括:電源模塊、充電主電路模塊、模擬量檢測模塊、顯示及報警模塊和IGBT 驅動模塊。系統總體結構如圖1 所示。
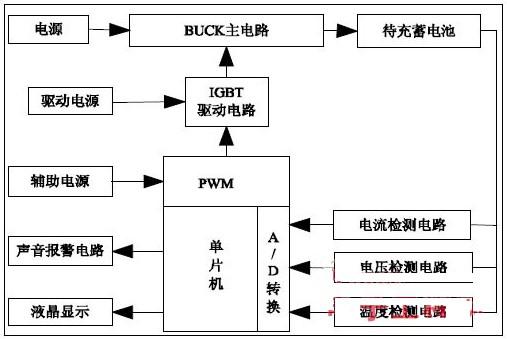
圖1 系統總體結構圖
在充電過程中,單片機實時采集電池充電過程中的電流、電壓和溫度等模擬量,通過其內部的A/D 轉換器將上述模擬量轉化為數字量,并判斷電池是否出現過壓、過流和過溫等故障。若出現故障,單片機立即關斷IGBT,并發出聲光報警。若檢測正常,則采用基于sugeno 推理的模糊PID 控制算法產生相應占空比的PWM 脈沖來控制IGBT 開關,通過BUCK 電路對電池進行充電。
2 系統硬件電路設計
2.1 充電主電路設計
充電主電路其實是一個BUCK 變換器,BUCK 電路屬于降壓斬波電路。充電主電路如圖3 所示。IGBT、二極管、電感L1 和電容C10 構成BUCK 電路,220V市電經變壓器降壓,通過整流橋整流和EMI平滑濾波后,作為直流充電電源。在工作過程中,PWM 控制信號的高電平脈沖出現,使IGBT 導通,電感L1 的電流不斷增大,并對電容C10 儲能,同時對電池充電。此時,續流二極管因反向偏置而截止。PWM 信號出現低電平時,IGBT 截止,電感L1 維持原電流方向,與續流二極管構成充電回路,利用L1 和C10 中存儲的電能向電池充電。
圖2 充電器實物圖
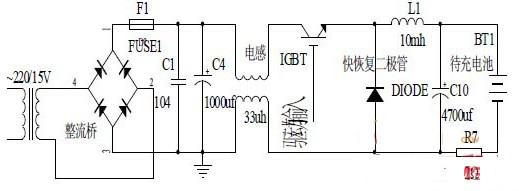
圖3 充電主電路
2.2 模擬量檢測模塊
2.2.1 電壓檢測電路設計
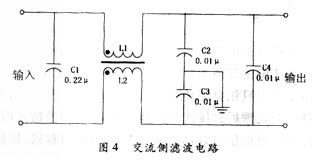
電壓檢測電路采用線性光耦HCNR201 將噪聲信號與單片機系統隔離開來,電壓檢測電路如圖4 所示。
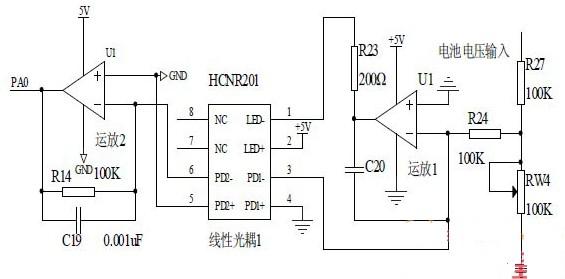
圖4 電壓檢測電路
在正常充電的過程中,電池端電壓Ubat 的變化范圍是9V-15V,而單片機檢測電壓的范圍是0-5V,所以通過R27 和Rw4 對電池兩端的電壓進行分壓,通過調節Rw4 的阻值來限定運算放大器1 的輸入電壓,使其始終保持在0-5V.電阻R24 來控制初級運放輸入偏置電流的大小,C20 起反饋作用,同時濾除了電路中的毛刺信號,避免HCNR201 的發光二極管LED 受到意外的沖擊。R23 可以控制LED 的發光強度,從而對控制通道增益起一定作用。運算放大器2 和電阻R14將線性光耦HCNR201 的輸出電流信號轉化成輸出電壓信號送入單片機。
2.2.2 電流檢測電路設計
充電電流是通過檢測充電回路電阻兩端的電壓,并通過計算其與充電回路電阻的比值得到的。因此電流檢測電路與電壓檢測電路基本相同,區別在于電流充電回路電阻兩端電壓已經在0-5V 范圍內,不需要電阻分壓。
2.2.3 溫度檢測電路設計
溫度檢測電路如圖5 所示。選用數字溫度傳感器DS18B20 檢測電池溫度,緊貼電池安裝,當電池溫度變化時,DS18B20 輸出引腳輸出相應的信號,單片機將該信號轉化為溫度顯示在液晶屏上。當溫度超過設定值時,發出報警信號。
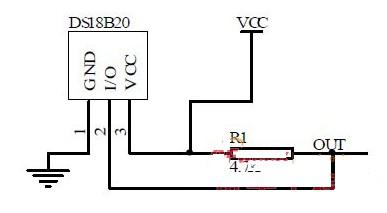
圖5 溫度檢測電路
2.3 顯示及報警模塊
顯示模塊主要是采用北京銘正同創科技有限公司生產的12864LCD 液晶顯示器。該液晶顯示器顯示的內容包括:電池充電電流、電壓、溫度和充電狀態等信息。
報警模塊的主要功能是當電池在充電過程中發生過壓、過流和過溫等情況時立即報警,并在12864 液晶屏上顯示故障原因,同時關斷IGBT 開關管。
2.4 IGBT 驅動模塊
IGBT 的驅動電路如圖6 所示。為了提高系統的抗干擾能力,采用光耦TLP250 作為IGBT 的核心驅動芯片。TLP250 光耦既保證了功率驅動電路與PWM 脈寬調制電路的可靠隔離,又具備了直接驅動IGBT 的能力,使驅動電路簡單。
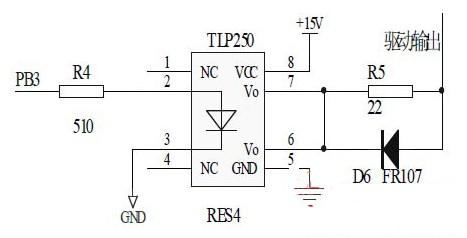
圖6 IGBT 驅動電路
3 模糊控制設計
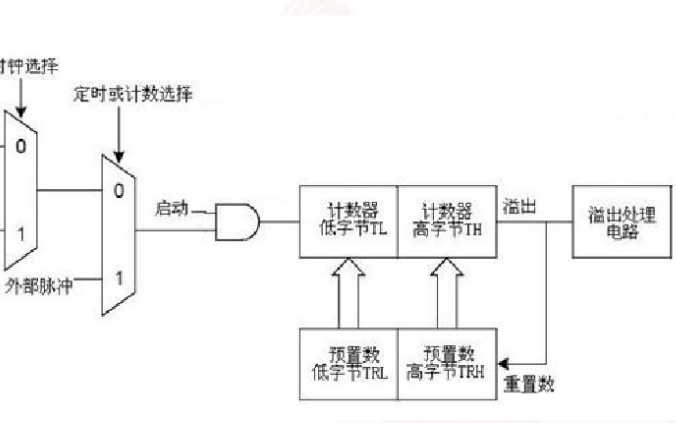
采用基于sugeno 推理的模糊PID 控制算法實現模糊控制器設計,輸入量為理想電流與實際電流之差ΔI和ΔI 的變化率ΔI/t,模糊控制器輸出為以比例、積分、微分控制的充電電流值,該控制算法簡化了控制器的結構、提高了抗干擾性和魯棒性[4-6].模糊控制器的總體結構圖如圖7 所示。
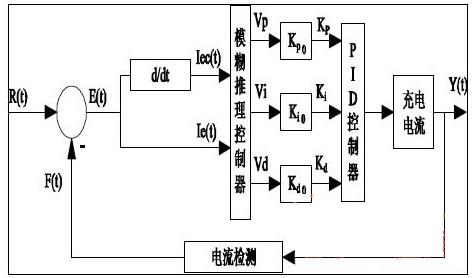
圖7 模糊控制器總體結構圖
3.1 輸入語言變量的隸屬函數
模糊控制器定義輸入偏差e(t)和偏差變化率ec(t)均有3 個模糊語言變量值:{ B(大)、M(中)、S(小)},它們的隸屬函數均采用對稱、全交疊的結構。輸入偏差e(t)和偏差變化率ec(t)的隸屬度函數如圖8 所示。
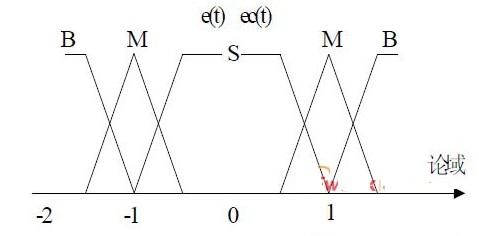
圖8 e(t)和ec(t)的隸屬度函數
3.2 模糊控制規則
模糊控制器設計的核心是模糊控制規則的選取和確定,本模糊控制器根據實際充電情況建立了基于sugeno 推理方式的五條模糊控制規則:
規則1:If e is B then νp is νp1,νi is νi1,νd is νd1;
規則2:If e is M and ec is B then νp is νp2, νi isνi2,νd is νd2;
規則3:If e is M and ec is M then νp is νp3,νi isνi3,νd is νd3;
規則4:If e is M and ec is S then νp is νp4, νi isνi4,νd is νd4;
規則5:If e is S then νp is νp5, νi is νi5,νd is νd5;
3.3 輸出語言變量值
模糊控制器采用sugeno 模糊推理方式,其輸出語言變量νp, νi ,νd 在下述五種控制規則中的取值如表1所示。
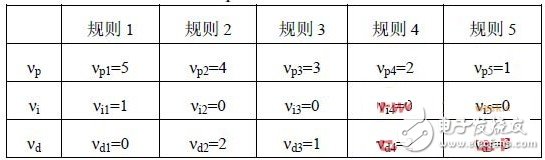
表1 νp,νi,νd 取值表
3.4 模糊推理算法
sugeno 型模糊推理算法,與其它類型的模糊推理算法不同,該算法可將去模糊化結合到模糊推理中,即在sugeno 型模糊規則后件部分,將輸出量表示為輸入量的線性組合,因此輸出為精確量,這是由sugeno型模糊規則的形式所決定的。針對上述模糊控制規則,可調因子νp,νi 和νd 的推理計算公式為:
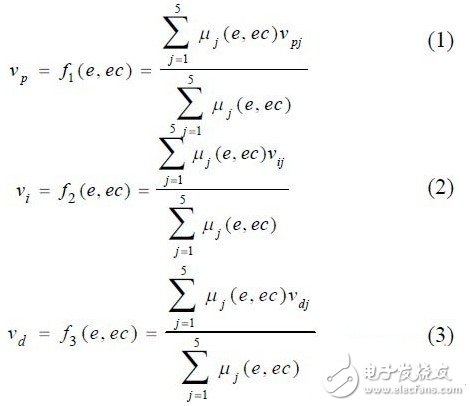
其中,隸屬度值為:
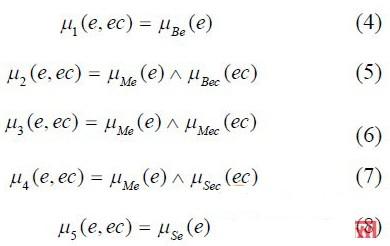
由此建立了PID 控制器參數的可調因子νp,νi 和νd與偏差e 和ec 之間的模糊函數關系,實現了PID 參數Kp, Ki 和Kd 的模糊在線自調整,滿足了系統的要求。
4 實驗
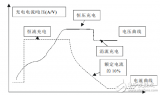
采用基于sugeno 推理的模糊PID 控制算法設計的智能型鉛酸蓄電池充電器和普通的鉛酸蓄電池充電器分別對電池進行充電實驗。實驗對象采用的是廊坊東三星蓄電池有限公司生產的12V、4A h 鉛酸蓄電池。
充電時間為140 分鐘,每隔5 分鐘記錄一次電流和溫度值。兩種模式下的充電電流曲線如圖9 所示,兩種模式下的充電溫度曲線如圖10 所示。
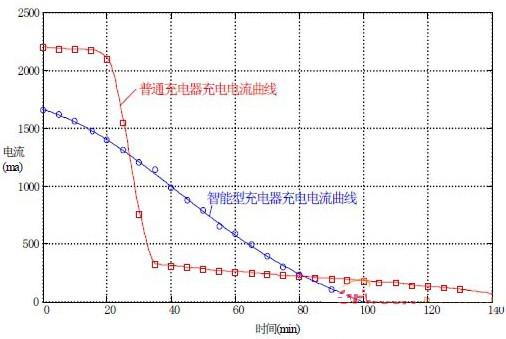
圖9 兩種模式下的充電電流曲線
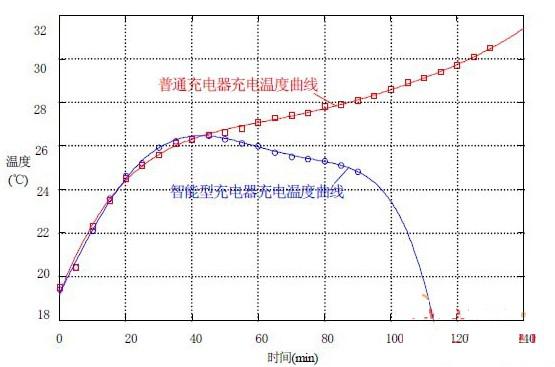
圖10 兩種模式下的充電溫度曲線
5 結論
本文以atmega16 單片機作為控制核心,設計了對鉛酸蓄電池智能充電器的硬件方案,并采用了一種基于sugeno 推理的模糊PID 控制算法,優化了鉛酸蓄電池的充電過程,保證了礦用永磁操動機構饋電開關智能控制器備用電源的安全使用。實驗結果表明,該設計方案解決了鉛酸蓄電池充電過程中存在的過充電、充電不足和發熱等問題,并在加快充電速度,減少能量損耗、延長使用電池壽命等方面效果顯著。
-
單片機
+關注
關注
6052文章
44768瀏覽量
642968 -
充電器
+關注
關注
100文章
4179瀏覽量
116852 -
控制器
+關注
關注
113文章
16727瀏覽量
180994
發布評論請先 登錄
相關推薦
atmega16單片機用于智能型鉛酸電池充電器
Atmega16單片機實用程序Atmega16單片機實用程序
基于ATmega16的簡易示波器設計
基于ATmega16單片機的干式變壓器智能溫度控制器設計
基于ATmega16單片機的實時溫度采集與分析系統

基于ATmega16單片機的智能快速充電機設計與實現
ATmega16單片機教程之ATmega16單片機定時器的分析與設計應用概述






 工商網監
工商網監

評論